

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Интересное:
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Элевационный винт служит для приведения визирной линии трубы в горизонтальное положение. С его помощью поднимают или опускают окулярный конец трубы; при этом пузырек уровня перемещается и когда он будет точно в нуль-пункте, визирная линия должна устанавливаться горизонтально. Цилиндрический уровень обычно контактный; изображение контактов пузырька передается системой призм в поле зрения трубы, что очень удобно, так как наблюдатель видит сразу и рейку, и уровень. Для нивелира с уровнем при трубе выполняются три поверки.. Ось цилиндрического уровня и визирная линия трубы должны быть параллельны и лежать в параллельных вертикальных плоскостях - это условие называется главным условием нивелира с уровнем при трубе. Ось круглого установочного уровня должна быть параллельна оси вращения нивелира. Приводят пузырек круглого уровня в нуль-пункт, затем поворачивают нивелир по азимуту на 180o.Горизонтальная нить сетки нитей должна быть перпендикулярна оси вращения нивелира, т.е. быть горизонтальной. Рейку ставят в 30 - 40 м от нивелира и закрепляют ее, чтобы она не качалась.
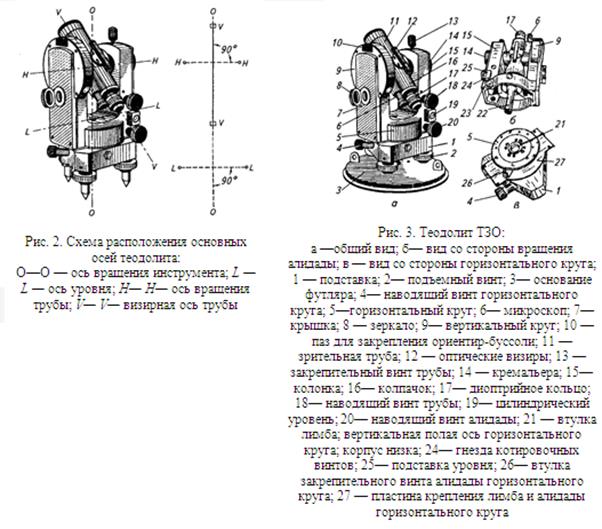

Ось круглого уровня должна быть параллельна вертикальной оси вращения.
Горизонтальная нить сетки должна быть перпендикулярна вертикальной оси вращения.
Визирная ось зрительной трубы должна бытъ параллельна оси цилиндрического уровня.
Поверки нивелиров с уровнем
Поверка 1. Ось круглого уровня должна быть параллельна оси прибора. Поверки и исправления выполняются аналогично поверке цилиндрического уровня при алидаде горизонтального круга теодолита.
Поверка 2. Вертикальная нить сетки должна быть параллельна оси вращения нивелира. Для выполнения поверки на расстоянии 20–30 м от нивелира на тонком шнуре подвешивают отвес и нивелир горизонтируют по круглому ровню. Совмещают один конец вертикальной нити сетки со шнуром отвеса. Если другой конец вертикальной нити отклонился от шнура не более 0.5 мм, условие поверки выполняется. В противном случае сетку нитей исправляют также, как сетку теодолита.
|
|
Поверка 3. Ось цилиндрического уровня должна быть параллельна визирной оси трубы. Поверка выполняется двойным нивелирование одной и тоже линии, с разных ее концов. Для этого на местности закрепляют два колышка на расстояние 50–70 м друг от друга. Над одной из точек устанавливают нивелир так, чтобы его окуляр находился на одной отвесной линии с точкой, горизонтируют и при помощи рулетки измеряют высоту инструмента i1. В другой точке вертикально устанавливают рейку и визируют на нее.
Совмещают концы изображения пузырька уровня и берут отсчет по рейке. Если условие поверки выполняется то по рейке будет взят отсчет b1’, а если нарушено – b1 содержащий в себе ошибку х.
h=i1–b1’=i1–(b1+x)
Нивелир и рейку меняют местами, измеряют i2 и берут отсчет по рейке b2. Поскольку расстояние между точками постоянно отсчет b2 будет ошибочным также на х.
|x|≤4 мм
В противном случае вычисляют правильный отсчет по рейке, и действуя элевационным винтом устанавливают среднюю нить сетки на этот отсчет.
При этом концы изображения пузырька разойдутся и их необходимо совместить исправительными винтами цилиндрического уровня. Для контроля поверку повторяют.
Поверки нивелира с компенсатором имеют дополнительные пункты:
1. Исследуется интервал действия компенсатора: определяется допустимый угол отклонения устройства от горизонтального и вертикального расположения, в пределах которого маятниковая система компенсатора продолжает нормально функционировать. Эта поверка требует дополнительного оборудования, фиксирующего точку зависания маятника компенсатора.
2. Визирная ось трубы должна оставаться горизонтальной при продольных наклонах инструмента в допустимых для системы компенсатора пределах.
|
|
Настройка выполняется юстировочными винтами, для контроля проверки выполняют необходимое количество раз.
14.Тригонометрическое нивелирование, вывод формулы.точность нивелирования и область применения. Определение высоты недоступного сооружения Тригонометрическое нивелирование – это метод определения превышения по измеренному углу наклона и расстоянию между точками. Его применяют при топографических съемках и при определении больших превышений.
Выполняют тригонометрическое нивелирование с помощью теодолита в точке А угол наклона n визирного луча, проходящего через визирную цель в точке В, и зная горизонтальное расстояние s между этими точками, высоту инструмента l и высоту цели а, разность высот h этих точек вычисляют по формуле: h = s tgn + l - a.
Эта формула точна только для малых расстояний, когда можно не считаться с влиянием кривизны Земли и искривлением светового луча в атмосфере.Более полная формула имеет вид: h = s tgn + l - a + (1 - k) s 2/2 R, где R – радиус Земли как шара и k – коэффициент рефракции.
Тригонометрическое нивелирование, сущность которого в измерении превышения наклонным визирным лучом на основе измерения угла наклона и расстояния, широко применяется в строительной геодезии при нивелировании по квадратам для построения картограммы земляных работ и планов земляных масс. Кроме того, при услугах практически любой топосъемки участка электронным тахеометром или теодолитом, тригонометрическое нивелирование присутствует по умолчанию. Точность такого нивелирования — до 3 мм относительно каждой станции тахеометрической съемки.
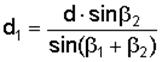
Работа выполняется с помощью теодолита, мерной ленты или рулетки. Для этого необходимо на местности разбить базис d такой длины, чтобы его конечные точки M и N отстояли от основания определяемого предмета, примерно, в полуторной высоте этого предмета, и угол b3 в вершине с недоступным  предметом (мачты) "О" был не менее 300.
предметом (мачты) "О" был не менее 300.
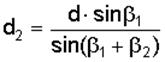
Базис d измеряется дважды с относительной погрешностью 1/2000. С концов базиса M и N измеряются полным приемом горизонтальные углы b 1 и b2, вертикальные углы n1 и n2 при точке N и n3 и n 4 – при точке М, наведением зрительной трубы на верхнюю точку А и основание предмета (мачты) О. Отсчет по вертикальному кругу при наблюдении верхней точки и основания предмета производится при КЛ и КП.Обработка наблюдений начинается с определения горизонтальных расстояний d1 и d2 по формулам:
|
|
 ,
, 
Углы наклона определяются по известной формуле вертикального круга для теодолитов типа 2Т30, то есть 
Полная высота предмета (мачты) Н определяется из формулы:
 .
.
Вычисленные значения высоты предмета Н по обеим формулам могут различаться в пределах 2–3 см. За окончательное значение высоты предмета принимается среднее арифметическое из полученных значений.
15.Принципы построения плановой и высотной геодезической сети понятие о триангуляции, трилатерации и полигонометрии.
Плановая и высотная геодезические сети делятся на 4 класса.
• Плановая сеть создается методом триангуляции, трилатерации и полигонометрии.
• Высотная сеть создается методом геометрического(при невозможности его выполнения тригонометрического) невилирования.
Государственная геодезическая сеть 1 класса строится в виде полигонов, образуемых рядами триангуляции или ходами полигонометрии, расположенных примерно вдоль параллелей и меридианов. (периметр полигона примерно 800км, а стороны(звенья) около 200км). В вершинах полигонов определяют парные астрономические пункты, которые называют пунктами Лапласа, на которых из астрономических наблюдений находят широту, долоту и азимут, что в свою очередь повышает надежность определения координат. На концах звеньев триангуляции измеряют базисные стороны. Внутри полигонов 1-го класса строят геодезическая сеть 2-го класса в виде сплошной сети триангуляции или полигонометрии, или ы виде системы пересекающихся ходов полигонометрии. В некоторых пунктах сети 2-го класса производятся астрономические определения широты, долготы и азимута.
Сети 3-го и 4-го класса, определяемые методами триангуляции, трилатерации и полигонометрии, являются сетями сгущения и строятся в виде отдельных систем.
При метое триангуляции в треугольниках измеряют все углы и минимум две стороны на разных концах сети (вторая сторона для контроля). Остальные стороны вычисляют, используя теорему синусов. Для вычисления координат всех точек надо знать координаты хотя бы одной точки и дирекционный угол одной линии. Метод триангуляции (от лат. triangulum –треугольник) был предложен голландским ученым Снеллиусом около 1610 г.
|
|
Метод полигонометрии заключается в построении сети ходов, в которых измеряются все углы и стороны. Полигонометрические ходы отличаются от теодолитных более высокой точностью измерений.
Метод трилатерации (от лат. trilaterus –трехсторонний) отличается от триангуляции тем, что в треугольниках измеряются не углы, а стороны. Для измерения сторон обычно используют электронные дальномеры. Углы вычисляются по измеренным сторонам, например, по теореме косинусов.
16.Плановое обоснование топографических съемок. Полевые работы.
Топографическая съемка - совокупнгеодезизмер на земнпов-ти для получения плана или карты- съёмка.Если по рез-ам съемки на плане получают положение контуров местности,тосъемку наз. горизонтальной, если пельеф, то вертик-ой. Съемку, в рез-те которой получают контуры местности и рельеф,назтопографич-ой. Съемочное обоснование создается на основе общего принципа построения геодезических сетей — от общего к частному. Оно опирается на пункты государственной сети и сетей сгущения, погрешности которых пренебрежительно малы по сравнению с погрешностями съемочного обоснования.
Точность создания обоснования обеспечивает проведение топографических съемок с погрешностями в пределах графической точности построений на плане данного масштаба. В соответствии с этими требованиями в инструкциях по топографическим съемкам регламентируют точность измерений и предельные значения длин ходов.
Самый распространенный вид съемочного планового обоснования - теодолитные ходы, опирающиеся на один или два исходных пункта, или системы ходов, опирающихся не менее чем на два исходных пункта. В системе ходов, в местах их пересечений, образуются узловые точки, в которых могут сходиться несколько ходов. Длины теодолитных ходов зависят от масштаба съемки и условий снимаемой местности. Например, для съемки застроенной территории в масштабе 1:5000 длина хода не должна превышать 4,0 км; в масштабе 1:500 - 0,8 км; на незастроенной территории - соответственно 6,0 и 1,2 км. Длины линий в съемочных теодолитных ходах должны быть не более 350 м и не менее 20 м. Относительные линейные невязки в ходах не должны превышать 1:2000, а при неблагоприятных условиях измерений (заросли, болото) - 1:1000. Углы поворота на точках ходов измеряют теодолитами со средней квадратической ошибкой 0,5’ одним приемом. Расхождение значений углов в полуприемах допускают не более 0,8’. Длину линий в ходах измеряют оптическими или светодальномерами, мерными лентами и рулетками. Каждую сторону измеряют дважды - в прямом и обратном направлениях. Расхождение в измеренных значениях допускается в пределах 1:2000 от измеряемой длины линии.При определении высот точек съемочного обоснования геометрическим нивелированием невязка в ходе не должна превышать 5√L см, тригонометрическим нивелированием - 20√L см, где L - длина хода, км.Точки съемочного обоснования, как правило, закрепляют на местности временными знаками: деревянными кольями, столбами, металлическими штырями, трубами. Если эти точки предполагается использовать в дальнейшем для других целей, их закрепляют постоянными знаками.
В результате выполнения полевых работ измеряют величины, необходимые для определения планового
или планово-высотного положения всех пунктов обоснования.
Полевые геодезические работы выполняются непосредственно на местности и в зависимости от назначения в них входят:разбивкапикетажа;создание плановой основы;привязка геодезической основы участков съемки к пунктам государственной основы или ведомственных съемок;съемка подробностей ситуации, рельефа, профилей и отдельных объектов;разбивка по перенесению проекта на местность при капитальных работах и при текущем содержании пути;наблюдения за режимом рек и водоемов и ряд других видов геодезических работ.
|
|
|
|
|

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!