Волновое сопротивление  .
.
Волновое сопротивление не зависит от длины линии, а определяется ее первичными параметрами.
Определим модуль и аргумент волнового сопротивления соответственно:
 ,
,  .
.
 Построим графическую зависимость
Построим графическую зависимость  и
и  . Для всех реально существующих линий
. Для всех реально существующих линий  , поэтому:
, поэтому:
Самостоятельно определить ωm! Ответ:  .
.
Используя уравнения передачи вида:
 ,
,  ,
,
определим напряжение и ток в начале линии при согласованном режиме, когда  , где
, где  – сопротивление нагрузки:
– сопротивление нагрузки:
 ,
,  ,
,
 ,
,  ,
,
 ,
,  .
.
Поскольку  ,
,  , тогда
, тогда  .
.
Окончательно получим:
 ,
,  .
.
Из последних уравнений легко определить напряжение и ток в конце линии:
 ,
,  .
.
Напряжение и ток в любой точке линии при согласованном режиме определяются:
 ,
,  .
.
8.9. Коэффициент распространения. Способ определения первичных параметров
Коэффициент распространения:  , откуда
, откуда
 – коэффициент ослабления,
– коэффициент ослабления,  – коэффициент фазы.
– коэффициент фазы.
Определим модуль и аргумент коэффициента распространения соответственно:
 ,
,  .
.
 Построим графическую зависимость
Построим графическую зависимость  и
и  .
.
При согласованном режиме , , отсюда:
 .
.
Пусть  ,
,  ,
,  ,
,  , тогда
, тогда
 , следовательно
, следовательно
 ,
,  , откуда определяем:
, откуда определяем:
 [Нп/м], либо
[Нп/м], либо  [дБ/м]
[дБ/м]
 , для линии длинной x = 1м, получаем
, для линии длинной x = 1м, получаем  [рад/м].
[рад/м].
Рассмотрим способ определения первичных параметров по известным вторичным параметрам.
Т.к.  ,
,  , то
, то
 ,
,  .
.
Таким образом:
 ,
,  ,
,  ,
,  .
.
Вопрос № 32 Входное сопротивление длинной линии
Входное сопротивление  линии определяется отношением напряжения и тока в начале линии. Определим входное сопротивление с помощью уравнений передачи:
линии определяется отношением напряжения и тока в начале линии. Определим входное сопротивление с помощью уравнений передачи:
 , после преобразований
, после преобразований
Рассмотрим частные случаи режима работы линии.
При согласованном режиме работы , тогда входное сопротивление линии равно волновому сопротивлению:  .
.
В режиме короткого замыкания  , тогда
, тогда
 .
.
В режиме холостого хода  , тогда
, тогда
 .
.
На практике удобно входное сопротивление линии выражать через параметры холостого хода и короткого замыкания, т.е.  и
и  .
.
 ,
,

Представим зависимость модулей сопротивлений XX и КЗ от длины линии и зависимость модуля от частоты при несогласованной нагрузке.
Теория четырехполюсников
Основные понятия и классификация четырехполюсников
Под ЧП понимают ЭЦ, которая соединяется и взаимодействует, т.е. обменивается энергией с другими цепями только через 4 вывода или полюса.
В общем случае выводы четырехполюсника располагаются произвольно:

Частным случаем является проходной ( ) четырехполюсник. У проходного ЧП к одной паре выводов подключается источник сигнала, к другой – нагрузка или потребитель сигнала и поэтому втекающие и вытекающие токи ЧП равны в парных зажимах.
) четырехполюсник. У проходного ЧП к одной паре выводов подключается источник сигнала, к другой – нагрузка или потребитель сигнала и поэтому втекающие и вытекающие токи ЧП равны в парных зажимах.

Классификация четырехполюсников очень похожа на классификацию двухполюсников. Четырехполюсники так же делятся на автономные и неавтономные. Автономные четырехполюсники сами создают токи и напряжения без воздействия внешних источников, неавтономные – не создают.
Различают четырехполюсники линейные и нелинейные. Линейные ЧП отличаются от нелинейных тем, что не содержат нелинейных элементов (НЭ) и поэтому характеризуются линейной зависимостью тока и напряжения на выходных зажимах от тока и напряжения на входных зажимах.
Четырехполюсники бывают активными и пассивными. Пассивные схемы не содержат источников электрической энергии, активные - содержат. Последние могут содержать зависимые и независимые источники.
В зависимости от структуры различают ЧП мостовые и лестничные: Г-образные, Т-образные, П-образные. Промежуточное положение занимают Т-образно-мостовые (Т-перекрытые) схемы ЧП.
Четырехполюсники делятся на симметричные и несимметричные. В симметричном ЧП перемена местами входных и выходных зажимов не изменяет напряжений и токов в цепи, с которой он соединен. Четырехполюсники кроме электрической симметрии могут обладать структурной симметрией, определяемой относительно вертикальной оси симметрии. Очевидно, четырехполюсники, симметричные в структурном отношении, обладают электрической симметрией.
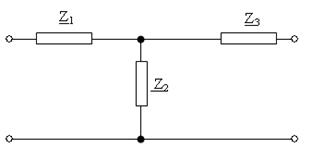
Это Т – образный ЧП.
При Z1 = Z3 ЧП симметричен
Четырехполюсники могут быть уравновешенными и неуравновешенными. Уравновешенные ЧП имеют горизонтальную ось симметрии и используются, когда необходимо сделать зажимы симметричными относительно некоторой точки (например, земли).
Пример уравновешенного ЧП
 Четырехполюсники делятся на обратимые и необратимые. Обратимые ЧП позволяют предавать энергию в обоих направлениях одинаково (удовлетворяют теореме обратимости).
Четырехполюсники делятся на обратимые и необратимые. Обратимые ЧП позволяют предавать энергию в обоих направлениях одинаково (удовлетворяют теореме обратимости).
Основные характеристики четырехполюсников
Основными характеристиками для четырехполюсников являются функциональные зависимости между токами и напряжениями на выводах. Эти зависимости подразделяют на передаточные и входные (выходные) функции. В основном, они рассматриваются в операторном виде, но часто и в комплексной форме, если нужно оценить частотные характеристики. Их подразделяют на собственные или характеристические параметры, рабочие параметры, матричные параметры. Рабочие параметры определяются с учетом сопротивлений генератора и нагрузки.






