

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Топ:
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Марксистская теория происхождения государства: По мнению Маркса и Энгельса, в основе развития общества, происходящих в нем изменений лежит...
Интересное:
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Выбрали LCD дисплей WH1602B-YYK-CTK

Рис.32 LCD дисплей WH1602B-YYK-CTK
Характеристики: Жидкокристаллический индика
Тип: знакосинтезирующий (текстовый)
Количество символов: 2 строки по 16 символов
Подсветка: светодиодная, желто-зеленая
Шрифт: латинский и кириллический
Габариты (мм): 80x36x14
Область вывода (мм): 56×11
Напряжение питания (В): 6
Интерфейс: HD44780 совместимый
Принципиальная схема устройства.
Принципиальная схема Freeduino Through - Hole.
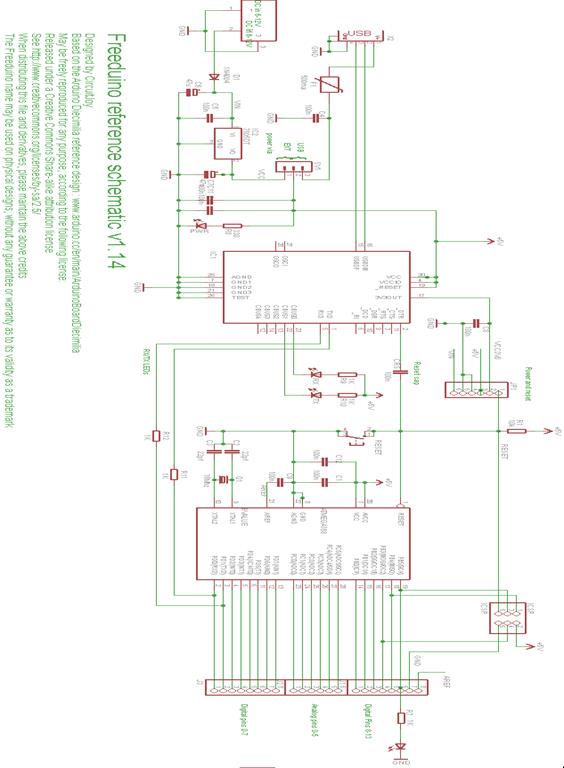
Рис.33 Принципиальная схема Freeduino
Принципиальная схема разрабатываемой системы.
С учетом выбранных компонентов спроектируем управляющую плату. Ее принципиальная схема представлена на рис. 34.

Рис. 34. Принципиальная схема управляющей платы.
Список компонентов:
Pitanie – выключатель питания установки;
START, STOP, P – Панель управления.
D1 – Цифровой датчик
D2 – Аналоговый датчик.
Ште – Инкрементальные энкодеры.
М1,М2,М3,М4 – приводы постоянного тока.
LCD – жки дисплей.
Radio – радио модуль позволяющий дистанционно управлять роботом.
Пример управления двигателями постоянного тока.
Ниже приведен пример простой программы, осуществляющей ступенчатое изменение скорости вращения двигателя с помощью Ibe управления.
const int PWM1 = 06; //Вывод шима
const int PWM2 = 9;
const int PWM3 = 10;
const int PWM4 = 11;
const int DIR1 = 7; //ывод для направления
const int DIR2 = 8;
const int DIR3 = 12;
const int DIR4 = 13;
const int ledPin = 13;
void setup() {
pinMode(PWM1, OUTPUT);
pinMode(DIR1, OUTPUT);
pinMode(PWM2, OUTPUT);
pinMode(DIR2, OUTPUT);
pinMode(PWM3, OUTPUT);
pinMode(DIR3, OUTPUT);
pinMode(PWM4, OUTPUT);
pinMode(DIR4, OUTPUT);
pinMode(ledPin, OUTPUT);
}
void loop() {
digitalWrite(ledPin, HIGH);
digitalWrite(DIR1, HIGH);
analogWrite(PWM1, 125);
digitalWrite(DIR2, HIGH);
analogWrite(PWM2, 255);
digitalWrite(DIR3, HIGH);
analogWrite(PWM3, 255);
digitalWrite(DIR4, HIGH);
analogWrite(PWM4, 255);
delay(800);
|
|
digitalWrite(ledPin, HIGH);
digitalWrite(DIR1, HIGH);
analogWrite(PWM1, 225);
digitalWrite(DIR2, HIGH);
analogWrite(PWM2, 225);
digitalWrite(DIR3, HIGH);
analogWrite(PWM3, 225);
digitalWrite(DIR4, HIGH);
analogWrite(PWM4, 225);
delay(700);
digitalWrite(ledPin, LOW);
digitalWrite(DIR1, HIGH);
analogWrite(PWM1, 0);
digitalWrite(DIR2, HIGH);
analogWrite(PWM2, 0);
digitalWrite(DIR3, HIGH);
analogWrite(PWM3, 0);
digitalWrite(DIR4, 0);
analogWrite(PWM4, 0);
delay(3000);
}
Заключение
В данном курсовом проекте был разработать привод лапы шагающего робота, был выбран электродвигатель. Спроектирована система цифрового автоматического управления приводом лапы шагающего робота. Был произведено тепловой расчёт привода. Для практической реализации данной системы цифрового управления были выбраны необходимые компоненты, разработана принципиальная схема. Спроектированный привод устройства удовлетворяет всем требованиям, указанным в техническом задании.
Библиографический список
1. Подураев, Ю. В. Мехатроника: основы, методы, применение [Текст]: уч. пос. / Ю. В. Подураев. - М.: Машиностроение, 2006.
2. Бесекерский, В. А. Теория систем автоматического управления [Текст] / В. А. Бесекерский, Е. П. Попов. - СПб.: Профессия, 2003.
3. Егоров, О. Д. Мехатронные модули. Расчет и конструирование [Текст]: уч.пос. / О. Д. Егоров, Ю. В. - М.: ИЦ МГТУ «СТАНКИН», 2004.
4. Яцун, С. Ф. Аналого – цифровые системы автоматического управления [Текст]: уч. пос. / С. Ф. Яцун, Т.В. Галицына. – Курск: ИПО КГТУ, 2006.
5. Олссон, Г. Цифровые системы автоматизации и управления [Текст] / Г. Олссон, Пиани Д. – СПб.: Невский Диалект, 2001.
6. Иванов М. Н. Детали машин: Учеб. для студентов высш. техн. учеб. заведений. – 5-е изд., перераб. – М.: Высш. шк., 1991. – 383 с.: ил.
7. Курмаз Л. В., Скойбеда А. Т. Детали машин проектирование: Справочное учебно-методическое пособие – М.: Высш. шк., 2004. – 309 с.:
8. Красковский Е.Я., Дружинин Ю.А., Филатова Е.М. Расчет и конструирование механизмов приборов и вычислительных систем: Учеб. пособие для приборостроит. спец. вузов / Под ред. Ю.А. Дружинина. – 2-е изд., перераб. и доп. – М.: Высш. шк., 1991.
9. Юферов Ф. М. Электрические двигатели автоматических устройств [Текст] / Ф. М. Юферов - Госэнаргоиздат, 1959.
|
|
10. Компания Freeduino/Arduino [Электронный ресурс]. – Режим доступа: http://www.freeduino.ru/, свободный.
11. Компания Boston Dynamics [Электронный ресурс]. – Режим доступа: http://www.bostondynamics.com/, свободный.
12. Компания Электронщик [Электронный ресурс]. – Режим доступа: http://www.electronshik.ru/, свободный.
|
|
|

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!