Лабораторная работа № 1
(4 часа)
по дисциплине “ Электрорадиоизмерения”
(спец. 160903 3 курс очное)
Тема №1. Аналоговые электромеханические измерительные приборы
Название. Изучение конструкции, принципа действия основных типов электромеханических измерительных приборов
Цель работы
Изучение конструкции, принципа действия основных типов электромеханических измерительных приборов и методики измерения с помощью этих приборов
Методические указания
При подготовке к выполнению лабораторной работы необходимо:
1. Изучить следующие вопросы:
- принцип действия магнитоэлектрических измерительных механизмов;
- принцип электродинамических и ферродинамических измерительных механизмов;
- принцип действия электромагнитных и электростатических измерительных механизмов;
2. Начертить электрические схемы для проведения эксперимента.
3. Подготовить таблицы для записи результатов экспериментов.
Литература
1. Атамалян Э.Г. Приборы и методы измерения электрических величин: Учебник.- М: Дрофа, 2005, с. 94-122
2. Фремке А.В. Электрические измерения: Учебник. - Л: Энергия, 1980, с. 61-75, 91-101
Теоретическая часть
4.1. Структурная схема и виды приборов
Электромеханические приборы относятся к приборам прямого преобразования. Структурная схема этих приборов показана на рис 1.

Рис. 1
Основными функциональными частями этих приборов (рис. 1) являются: измерительная цепь ИЦ, измерительный механизм ИМ и отсчетное устройство ОУ. Они размещаются в общем корпусе.
В ИЦ происходит преобразование входного сигнала Х в одну или две промежуточные электрические величины У1 и У2 (например, токи I 1 и I 2 или напряжение U), воздействующие на ИМ. ИЦ может также служить для расширения пределов измерений и компенсации погрешностей.
В ИМ происходит преобразование электромагнитной энергии We, обусловленной наличием промежуточных величин У1 и У2, в механическую. ИМ состоит из неподвижной и подвижной частей. Под действием измеряемой величины в измерительном механизме создается вращающий момент Мвр, поворачивающий подвижную часть ИМ. В общем случае вращающий момент зависит от измеряемой величины Х и угла поворота подвижной части a: Мвр = f(X, a). Для электромеханических приборов вращающий момент находится как
 (1)
(1)
В зависимости от принципа действия ИМ применяются следующие группы (системы) приборов: магнитоэлектрическая, электромагнитная, электродинамическая, ферродинамическая, электростатическая, индукционная.
Принцип действия ИМ различных групп приборов основан на взаимодействии: 1) магнитоэлектрических ИМ - магнитных полей постоянного магнита и проводника с током; 2) электромагнитных - магнитного поля, создаваемого проводником с током, и ферромагнитного сердечника; 3) электродинамических (и ферродинамических) - магнитных полей двух систем проводников с токами; 4) электростатических - двух систем заряженных электродов; 5) индукционных - переменного магнитного поля проводника с током и индуцированных этим полем вихревых токов в подвижном элементе (например, в алюминиевом диске счетчика электрической энергии переменного тока). В результате подобного взаимодействия в ИМ и создается вращающий момент Мвр.
Если бы в ИМ действовал только вращающий момент Мвр, то подвижная часть ИМ отклонилась бы до упора независимо от значения измеряемой величины. Для того чтобы каждому значению Х соответствовало определенное значение a, момент Мвр уравновешивается противодействующим моментом Мпр, зависящим от a и направленным в сторону, обратную Мвр. В большинстве приборов момент Мпр создается спиральными пружинами или растяжками, и в этом случае
Мпр = W a,
где W - удельный противодействующий момент пружин или растяжек. В логометрах (приборах для измерения отношения токов) момент Мпр создается измеряемой величиной Х, и в этом случае Мпр =f(Х). При установившемся отклонении a 0 подвижной части Мвр = Мпр.
Отклонения подвижной части ИМ наблюдают с помощью отсчетного устройства ОУ, т. е. части конструкции прибора, предназначенной для отсчитывания значений измеряемой величины. В электромеханических приборах ОУ состоит из шкалы и указателя (стрелки или светового указателя). По ОУ определяют показание измерительного прибора Хп, т. е. значение измеряемой величины в принятых единицах этой величины. Номинально Хп = Х. Для соответствия значения Х определенному значению Хп необходимо, во-первых, чтобы параметры ИЦ, ИМ и ОУ при определенных внешних условиях были постоянными и, во-вторых, чтобы отклонения этих параметров при различных внешних условиях вызывали малые изменения показаний, допустимые для данного прибора.
При отклонении подвижной части прибора механическим толчком от положения равновесия a 0 на угол Δα она снова приходит в положение равновесия под влиянием устанавливающего момента Му, равного разности моментов Мвр и | -Мпр |. Момент Му всегда направлен в сторону, обратную изменению отклонения подвижной части Δα. Производная от устанавливающего момента по углу отклонения называется удельным устанавливающим моментом Муу
 (2)
(2)
В приборах с креплением подвижной части на кернах этот момент является важной характеристикой, определяющей степень нечувствительности прибора к затираниям. Чем больше у прибора Муу, тем меньше у него вариация показания. В магнитоэлектрическом приборе Муу остается постоянным вдоль всей шкалы прибора и равен удельному противодействующему моменту W. На подвижную часть ИМ кроме Мвр и Мпр действуют и другие моменты: успокоения Мусп, трения Мтр (в приборах на кернах), инерции Мин = J (d 2 α/ dt 2).
Момент успокоения Мусп действуют только при движении подвижной части, создается успокоителем и направлен навстречу этому движению.
4.2. Основные характеристики электромеханических приборов
Все средства измерений можно характеризовать некоторыми общими свойствами - метрологическими характеристиками.
Метрологическими характеристиками средств измерений называются такие характеристики их свойств, которые оказывают влияние на результаты и погрешности измерений и предназначены для оценки технического уровня и качества средств измерений, для определения результатов измерений и расчетной оценки характеристик инструментальной и методических составляющих погрешности измерений.
Основными характеристиками электромеханических приборов являются: точность, чувствительность, диапазон измерений, собственное потребление мощности, время успокоения, устойчивость к перегрузкам (электрическим и механическим), надежность и др.
Точность средства измерений есть качество средства измерений, отражающее близость нулю его погрешностей. Чем меньшие погрешности имеет средство измерений, тем оно считается более точным.
Свойства электромеханического прибора в отношении точности характеризуется классом точности и другими свойствами прибора, влияющими на его точность, значения которых устанавливаются в стандартах на отдельные виды приборов.
Класс точности - обобщенная характеристика прибора, определяемая пределами допускаемой основной и дополнительных погрешностей (т. е. наибольшими погрешностями, при которых прибор по техническим требованиям может быть допущен к применению).
Способы нормирования и формы выражения пределов основной и дополнительных погрешностей (абсолютная, относительная и приведенная), а также обозначения классов точности приведены в ГОСТ 8.401—80. Нормальные значения влияющих величин и рабочие условия применения установлены ГОСТ 22261-82.
Показателями качества рассматриваемых приборов в отношении точности являются также вариация показаний и невозвращение указателя к отметке механического нуля.
Вариация выходного сигнала (показаний) средства измерений есть средняя разность между значениями выходного сигнала (показаниями) средства измерений, соответствующими данной точке диапазона измерения, при двух направлениях медленного многократного измерения входного сигнала в процессе подхода к данной точке диапазона измерения. Вариация определяется по значениям выходного сигнала при подходе к одному и тому же значению входного сигнала сначала со стороны больших, а затем - меньших значений. В отличие от чувствительности вариация характеризуется изменением не входного, а выходного сигнала.
Вариация показаний имеет место в приборах с подвижной частью на кернах (вызывается в основном трением в опорах), а также в приборах с магнитомягкими сердечниками или магнитопроводами при работе на постоянном токе. Для большинства приборов вариация не должна превышать абсолютного значения допускаемой основной погрешности.
Невозвращение указателя к отметке механического нуля определяется при плавном подводе указателя к этой отметке от наиболее удаленной от нее отметки шкалы. Оно обусловлено упругим последействием растяжек или спиральных пружин и не должно превышать (для приборов с подвижной частью на растяжках) значения
γуп = 0,01 γкл ℓш,
где γкл - числовое обозначение класса прибора; ℓш -длина шкалы, мм.
Диапазон измерений – область значений величины, в пределах которой нормированы допускаемые пределы погрешности средства измерений.
Значения величины, ограничивающие диапазон измерений снизу и сверху (слева и справа), называют соответственно «нижним пределом измерений прибора» или «верхним пределом измерений прибора».
Нижний предел измерения реально не бывает равным нулю, так как он ограничивается обычно порогом чувствительности, помехами или погрешностями измерений. Поэтому для многих измерительных приборов, на шкале которых имеется отметка «0», нижний предел измерения в действительности не равен нулю.
Различают полный и рабочий диапазоны измерения измеряемой величины (рис.2).
| Рис. 2. Диапазоны измерений
| |
Диапазон, в котором относительная погрешность не превышает 100 %, называется полным диапазоном. Полный диапазон ограничивается снизу порогом чувствительности D пор ., а сверху - конечным значением X к, т.е. Хп = D пор … X к или Дп = X к / D пор.
Под порогом чувствительности понимается минимальное значение входной величины, которое можно обнаружить с помощью данного средства измерения без каких либо дополнительных устройств, погрешность её измерения d = 100 %. Порог чувствительности выражается в единицах измеряемой величины. В электромеханических измерительных приборах порог чувствительности не равен нулю вследствие трения подвижной части.
Диапазон, в котором относительная погрешность не превышает некоторого заранее заданного значения d з, называется рабочим диапазоном изменения измеряемой величины. Рабочий диапазон ограничивается снизу значением Х=Хз, при котором d = d З, а сверху – конечным значением X к, т.е. Хр = Хз … Хк или Др = Хк/ Хз. Рабочий диапазон всегда представляет часть полного диапазона.
Чувствительность определяется как отношение приращения выходного сигнала D Хп на выходе измерительного прибора к вызвавшему это приращение изменению входного сигнала D Х. В общем случае чувствительность определяется как
 (3)
(3)
и называется абсолютной чувствительностью. Эта величина является размерной и зависит от единиц, в которых выражаются X и Y. Для линейной градуировочной характеристики чувствительность S = const, для нелинейных характеристик чувствительность является переменной величиной, различной для разных значений Х.
В практике пользуются относительной чувствительностью
 (4)
(4)
где D X / X - относительное изменение входной величины, выражаемое чаще всего в процентах. Относительная чувствительность S 0 имеет размерность выходной величины на 1% изменения входной величины.
Для стрелочных приборов S = α / X. Поэтому измеряемая величина
 , (5)
, (5)
где a - показание прибора; 1/ S – постоянная прибора или цена деления.
В приборах с линейной градуировочной характеристикой цена деления постоянна в диапазоне измерений и носит название - постоянная прибора. Для получения значения величины в соответствующих единицах надо отсчет в делениях умножить на постоянную прибора.
Измеряемый объект и средство измерений связаны и взаимодействуют между собой. Такое взаимодействие необходимо для проведения измерения.
Для приведения в действие измерительного прибора необходима энергия, которая потребляется от объекта измерения. Естественно, эта энергия должна быть небольшой, чтобы измерительный прибор не вносил заметного искажения в измеряемый процесс. Поскольку мощность, потребляемая входной цепью прибора, конечна, ее значение является важным показателем средства измерения.
У электромеханических приборов потребляемая мощность определяется входным сопротивлением прибора. Для приборов, реагирующих на напряжение (включаемых параллельно участку цепи), входное сопротивление должно быть большим, тогда входная мощность Р = U2/Rвх будет невелика. У приборов, чувствительных к току (включаемых последовательно в электрическую цепь), входное сопротивление, наоборот, должно быть минимальным (по крайней мере, намного меньшим, чем сопротивление участка цепи).
Входное сопротивление является важным параметром средства измерений. Оно показывает степень приспособленности данного средства к измерениям в маломощных измерительных цепях. Если мощность, потребляемая входной цепью прибора, одного порядка с мощностью входного сигнала, приходится вводить поправки или обеспечивать согласование прибора с источником измерительного сигнала.
Динамические характеристики средства измерений описывают инерционные свойства средств измерений и определяют зависимость выходного сигнала средств измерений от меняющихся во времени величин: входного сигнала, нагрузки, влияющих величин.
При изменении измеряемого значения подвижная часть ИМ, обладающая определенным моментом инерции, не сразу устанавливается в положение равновесия, а совершает во время переходного процесса колебательное, или апериодическое, движение.
Временем успокоения подвижной части ИМ называется промежуток времени, прошедший с момента изменения измеряемой величины до момента, когда отличие показания прибора от установившегося его показания не превысит ±1% от длины шкалы.
Время успокоения tУ отсчитывают от начала перемещения указателя до того момента, когда положение указателя будет отличаться от установившегося не более чем на ±1% от угла шкалы (≤ 0,01αШ).
Для измерительных приборов обычно указывается время установления показания: промежуток времени с момента начала измерения до момента установления показаний (т.е. когда переходный процесс закончился). Значение tу для большинства электромеханических приборов не должно превышать 4 с (для электростатических и термоэлектрических приборов 6 с).
Отношение первого отброса α1 указателя (размаха первого колебания подвижной части при внезапном изменении измеряемой величины) к установившемуся отклонению α0 для показывающих приборов не должно превышать 1,5 (ε = α1/α0 ≤ 1,5). Это отношение является характеристикой переходного процесса в рассматриваемых приборах.
Надежностью измерительного прибора называется его свойство выполнять заданные функции, сохраняя во времени значения установленных эксплуатационных показателей в заданных пределах, соответствующих заданным условиям использования, хранения и транспортирования. Надежность прибора – это, прежде всего его безотказность, т. е. свойство непрерывно сохранять работоспособность в течение некоторого времени. Нарушения работоспособности или отказы характеризуются изменениями одного или нескольких заданных параметров прибора, которые могут быть скачкообразными (внезапные отказы) или постепенными (постепенные отказы).
Для щитовых приборов и переносных показывающих приборов основными контролируемыми параметрами, по которым определяют отказы, являются основная погрешность, вариация, невозвращение указателя, влияние наклона, электрическая прочность и сопротивление изоляции, время успокоения. Показатели надежности приведены в ГОСТ 22261—82, 27.003—83, 4.194—85.
4.3. Общие элементы электромеханических измерительных приборов
Для большинства ЭИП, несмотря на разнообразие ИМ, можно выделить общие узлы и детали — устройства для установки подвижной части ИМ, для создания противодействующего момента, уравновешивания и успокоения.
 Устройства для установки подвижной части ИМ. Так как любой измерительный механизм ЭИП состоит из подвижной и неподвижной частей, то для обеспечения свободного перемещения подвижной части последнюю устанавливают на опорах (рис. 3, а), растяжках (рис. 3, 6), подвесе (рис. 3, в). При транспортировке подвижную часть ИМ закрепляют неподвижно с помощью арретира.
Устройства для установки подвижной части ИМ. Так как любой измерительный механизм ЭИП состоит из подвижной и неподвижной частей, то для обеспечения свободного перемещения подвижной части последнюю устанавливают на опорах (рис. 3, а), растяжках (рис. 3, 6), подвесе (рис. 3, в). При транспортировке подвижную часть ИМ закрепляют неподвижно с помощью арретира.
Рис. 3
Устройства для установки подвижной части на опорах представляют собой легкую алюминиевую трубку, в которую запрессовывают керны (стальные отрезки). Концы кернов затачивают и шлифуют на конус с закруглением. Опираются керны на агатовые или корундовые подпятники. При установке подвижной части ИМ на кернах между керном и подпятником возникает трение, что вносит погрешность в показания прибора.
В приборах высокого класса точности (лабораторных) для уменьшения трения шкала устанавливается горизонтально, а ось вертикально. При этом нагрузка сосредоточена в основном на нижней опоре.
Устройства для установки подвижной части на растяжках представляют собой две тонкие ленты из бронзового сплава, на которых подвешивается подвижная часть ИМ. Их наличие обеспечивает отсутствие трения в опорах, облегчает подвижную систему, повышает виброустойчивость. Растяжки используют для подведения тока к обмотке рамки и создания противодействующего момента.
Устройства для установки подвижной части на подвесах используют в особо чувствительных приборах. Подвижную часть ИМ подвешивают на тонкой металлической (иногда кварцевой) нити. Ток в рамку подвижной части подводят через нить подвеса и специальный безмоментный токоподвод из золота или серебра.
Устройства для создания противодействующего момента. Для создания противодействующего момента в ИМ с установкой подвижной части на опорах (рис. 4) используют одну или две плоские спиральные пружины 5 и 6, выполненные из оловянно-цинковой бронзы. Пружины служат также в качестве токоподводов к обмотке рамки подвижной части. Одним концом пружину крепят к оси или полуоси, а другим — к поводку 4 корректора. Корректор, устанавливающий на нуль стрелку 3 не включенного прибора, состоит из винта 9 с эксцентрично расположенным пальцем 8 и вилки 7 с поводком. Винт 9 корректора выводится на переднюю панель корпуса прибора, вращаясь, он движет вилку 7, что вызывает закручивание пружины и соответственно перемещение стрелки 3. Ось 2 заканчивается кернами, опирающимися на подпятники 7.

Рис. 4
Устройства для уравновешивания подвижной части. Для уравновешивания подвижной части служат грузики-противовесы 10. Измерительный механизм считается уравновешенным, когда центр тяжести подвижной части совпадает с осью вращения. Хорошо уравновешенный измерительный механизм показывает при различных положениях одно и то же значение измеряемой величины.
Устройства для создания успокоения ИМ. Для создания необходимого успокоения ИМ снабжают успокоителями, развивающими момент, направленный навстречу движению (время успокоения не более 4 с). В ИМ наиболее часто применяют магнитоиндукционные и воздушные успокоители, реже — жидкостные (когда требуется очень большое успокоение).
Магнитоиндукционный успокоитель (рис. 5, а) состоит из постоянного магнита 1 и алюминиевого диска 2, жестко связанного с подвижной частью механизма и свободно перемещающегося в поле постоянного магнита. Успокоение создается за счет взаимодействия токов, индуцированных в диске при его перемещении в магнитном поле постоянного магнита с потоком этого же магнита.

Рис. 5
Воздушный успокоитель (рис. 5, б) представляет собой камеру 1, в которой перемещается легкое алюминиевое крыло (или поршенек) 2, жестко связанное с подвижной частью ИМ. При перемещении воздуха из одной части камеры в другую через зазор (между камерой и крылом) тормозится движение крыла и колебания подвижной части быстро затухают. Воздушные успокоители слабее магнитоиндукционных.
4.4. Магнитоэлектрические измерительные приборы
Принцип действия магнитоэлектрических приборов (рис. 6) основан на взаимодействии поля постоянного магнита 1 и проводников в виде рамки 2, расположенных на стальном сердечнике 4, по которым протекает измеряемый ток I.
Сила F, с которой магнитное поле постоянного магнита (N-S) действует на рамку с током I, зависит от величины тока I и магнитной индукции поля B = S × F, где S – площадь рамки, а F - магнитный поток. В результате силового воздействия постоянного магнитного поля на рамку с током создается вращающийся момент Мвр = с × F × I, (с – коэффициент пропорциональности), который заставляет рамку 2 вращаться. Поскольку стрелка 3 измерительного прибора жестко связана с осью рамки, стрелка прибора начинает перемещаться. Момент Мвр при определенном угле поворота уравновешивается противодействующим моментом Мпр,создаваемым пружиной 5. Стрелка устанавливается на определенном делении шкалы при равенстве моментов Мвр = Мпр. Угол поворота стрелки:
a = с·I
прямо пропорционален величине измеряемого тока I, следовательно, шкала магнитоэлектрического прибора равномерная.

| Условное обозначение прибора
| |

Рис. 6. Устройство прибора магнитоэлектрической системы
Направление вращающегося момента, определяемое по правилу левой руки, изменяется, если ток меняет свое направление, поэтому на клеммах прибора обязательно указывается полярность (+ и -) для правильного включения прибора (отклонение стрелки от нуля слева направо (см. рис.6)).
Если такой прибор включить в цепь переменного синусоидального тока, то на его измерительную катушку (рамку) будут действовать быстро изменяющиеся по величине и направлению силы, среднее значение которых равно нулю. В результате стрелка прибора не будет отклоняться от нулевого положения. Поэтому для измерений в цепях переменного тока магнитоэлектрические приборы можно применять только со специальными преобразователями.
Достоинства приборов данной системы: высокая точность измерений; равномерная шкала; незначительное потребление энергии; малая чувствительность к посторонним (наведенным) магнитным полям.
Недостатки: необходимость применения специальных преобразователей для измерений в цепях переменного тока; чувствительность к перегрузкам.
Класс точности магнитоэлектрических приборов 0,5-1,5. Чаще всего они применяются для измерения напряжения, тока и сопротивления в цепях постоянного тока. Условное обозначение прибора магнитоэлектрической системы показано на рис. 1 в правом нижнем углу.
Погрешности магнитоэлектрических приборов. Одной из основных причин возникновения погрешности является отклонение температуры от градуировочной (температурная погрешность). При повышении температуры уменьшаются магнитная индукция в рабочем зазоре (индукция уменьшается примерно на 0,2 % на 10 0С) и удельный противодействующий момент (удельный противодействующий момент уменьшается примерно на 0,2-0,4 % на 10 0С), увеличивается электрическое сопротивление обмотки рамки и токоподводов (пружинок или растяжек).
Следует отметить, что при уменьшении магнитной индукции показания магнитоэлектрического прибора уменьшаются, а при уменьшении удельного противодействующего момента показания увеличиваются. Таким образом, эти два фактора взаимно компенсируют друг друга.
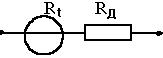
Рис. 7
Для уменьшения температурной погрешности, обусловленной изменением электрического сопротивления обмотки рамки и растяжек (или пружинок), в магнитоэлектрических приборах применяются различные схемные решения (рис. 7). Эту погрешность можно уменьшить, включая последовательно с температурно-зависимым сопротивлением Rt добавочное сопротивление R Д из материала, электрическое сопротивление которого практически не зависит от температуры Результирующий температурный коэффициент такой цепи
 , (6)
, (6)
где α R – результирующий температурный коэффициент сопротивления цепи; α t - температурный коэффициент сопротивления материала рамки.
Из выражения (6) видно, что чем больше может быть отношение R Д / Rt, тем меньше α R и, следовательно, тем меньше температурная погрешность γ t. Для вольтметров на пределы измерения больше 3—5В можно уменьшить γ t до значений, соответствующих классу точности 0,2 и даже 0,1. Для милливольтметров, к которым можно отнести и амперметры с шунтом, этот способ компенсации неэффективен, прежде всего, потому, что связан с увеличением собственного потребления, т. е. с уменьшением чувствительности прибора.
Для милливольтметров основными схемами температурной компенсации являются последовательно-параллельная схема (рис.8, а) и схема с термосопротивлением (рис. 8, б).

а) б)
Рис.8
Электрическая цепь измерительного механизма состоит из сопротивления обмотки R0 и последовательно с ним включенного сопротивления упругих элементов (пружинок или растяжек) R1. Температурные коэффициенты электрического сопротивления материалов обмотки и упругих элементов, как правило, различны. При расчете сопротивление упругих элементов разбивают на две части: «медную», имеющую температурный коэффициент такой же, как и материал обмотки, выполняемой обычно из меди, и «манганиновую» - с нулевым температурным коэффициентом. На схеме рис. 8 обозначены: R 0 – сумма сопротивлений обмотки и «медной» части упругих элементов (α0); R 1 – сумма «манганиновой» части сопротивления упругих элементов и добавочного сопротивления из манганина (α1 = 0); R 2 – добавочное сопро-тивление из манганина (α2 = 0); R 3 – сопротивление шунта, выполняемого обычно из меди или никеля (α3).
Температурная погрешность находится как:
 (7)
(7)
где I0 – ток в цепи ИМ при температуре градуировки t0; I0 t - ток в цепи ИМ при температуре t = t + θ
 (8)
(8)
Вторая составляющая в выражении (7) много меньше первой и ей можно пренебречь. В этом случае температурная погрешность γ t будет равна нулю, если выполняется условие
 . (9)
. (9)
Из (9) следует, что условие, при котором выполняется требование γ t = 0, не содержит температуру перегрева θ, т. е. справедливо для любого диапазона изменения температур. Такой вывод имеет место в результате принятого допущения (исключением из рассмотрения зависимости γ t от составляющей, содержащей θ2). Учет этой зависимости показывает, что в действительности для заданного диапазона изменения температуры θ требование γ t = 0 можно выполнить только для двух температур внутри этого диапазона.
Рассмотренная схема обладает высокой стабильностью, технологичностью и позволяет обеспечить требуемую температурную компенсацию для приборов самых высоких классов точности, имеет большое собственное потребление. От этого недостатка свободна схема с полупроводниковым терморезистором (рис.8,б). Однако ввиду недостаточно высокой воспроизводимости свойств и пониженной стабильности схемы с терморезисторами применяют только в приборах классов точности 1,5; 2,5 и не выше чем класса 0,5. Применяют другие схемы и методы термокомпенсации — мостовые схемы, термомагнитные шунты и т. д.
Области применения. Магнитоэлектрические приборы являются наиболее распространенной группой электромеханических приборов.
Магнитоэлектрические приборы применяют в качестве: 1) амперметров и вольтметров для измерения токов и напряжений в цепях постоянного тока (для этих целей приборы других групп используют в редких случаях); 2) омметров; 3) гальванометров постоянного тока, используемых в качестве нулевых индикаторов, а также для измерения малых токов и напряжений; 4) баллистических гальванометров, применяемых для измерений малых количеств электричества; 5) приборов для измерений в цепях переменного тока: а) осциллографических гальванометров, применяемых для наблюдения и записи быстропротекающих процессов; б) вибрационных гальванометров, используемых в основном в качестве нулевых индикаторов переменного тока; в) выпрямительных, термоэлектрических и электронных приборов, содержащих преобразователь переменного тока в постоянный.
Достоинствами магнитоэлектрических приборов являются: 1) высокая чувствительность; 2) высокая точность; 3) малое собственное потребление мощности; 4) равномерная шкала; 5) малое влияние внешних магнитных полей.
К недостаткам магнитоэлектрических приборов можно отнести: 1) невысокую перегрузочную способность; 2) сравнительно сложную конструкцию; 3) применение, при отсутствии преобразователей, только в цепях постоянного тока.
Магнитоэлектрические приборы занимают первое место среди других электромеханических приборов. Они выпускаются вплоть до класса точности 0,05, а по чувствительности с током полного отклонения до 0,1 мкА (при классе точности 1,5).
Рис. 9. Устройство прибора электромагнитной системы
Угол отклонения стрелки прибора:
a = с·I2
прямо пропорционален квадрату величины измеряемого тока I, (где с- коэффициент пропорциональности).
Шкала прибора из-за квадратичного характера зависимости между углом отклонения подвижной части a и током I неравномерная (см. рис. 9). Поскольку шкала неравномерная, измерения, проводимые в начале шкалы имеют либо очень большую погрешность, либо вообще невозможны (сектор [0 ¸ 0,3] - так называемая “зона нечувствительности” данного прибора).
Прибор пригоден для измерения как постоянного, так и переменного тока, так как изменение направления тока на обратный не меняет знака угла a отклонения подвижной части (т. к. угол отклонения пропорционален квадрату тока). Показания приборов при измерениях на переменном токе равны действующему (среднеквадратичному) значению измеряемой величины и не зависят от формы кривой измеряемых токов и напряжений.
Достоинства электромагнитных приборов: простота конструкции и низкая стоимость; пригодность для работы в цепях постоянного и переменного токов; надежность и устойчивость к перегрузкам.
Недостатки: низкая точность и чувствительность, так как магнитный поток большую часть пути проходит по воздуху; большое собственное потребление энергии; зависимость показаний от внешних магнитных полей; неравномерная шкала.
Класс точности приборов данной системы не выше 1,5. Условное обозначение прибора электромагнитной системы показано на рис. 9 в правом нижнем углу.
В многопредельных амперметрах, применяемых в качестве переносных приборов, рабочую катушку выполняют секционированной и с помощью переключателя получают различные схемы соединения секций катушки. Двухпредельные амперметры имеют две секции, включаемые последовательно или параллельно (рис. 10, б), а трехпредельные - четыре, включаемые последовательно, смешанно или параллельно (рис.10, в).
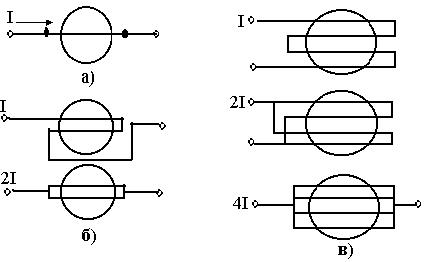
Рис. 10
В однопредельных вольтметрах последовательно с рабочей катушкой включают добавочный резистор из манганина (рис. 11, а).

|
|
|





