Первый этап, включает вычисление элементов ПМП в соответствии с заданным характеристическим многочленом. Исходными данными при этом являются константа С, определяющая длину последовательности, коэффициенты характеристического многочлена d 0, …, d С и элемент начального блока a 1,…, a С. Все данные подготавливаются и вводятся в алфавите {0,1}. Программа вычисления ПМП осуществляет переход к алфавиту {+1, -1}, вычисление в соответствии с формулой (59) и запоминание элементов ПМП.
Вычисление КФ М-последовательности проводится для сигнала в виде пачки сигнальных посылок в соответствии с формулой (69), которая для этого преобразуется к виду:
где Е [.] – целая часть числа.
В качестве примеров при вычислении КФ используются n = 0, 1, 2 – количество полных периодов, на которых вычисляются значения КФ, q = 0,1 – циклический сдвиг М-последовательности в каждой последующей посылке, Р – количество элементов усеченной последовательности.
Порядок выполнения и интерфейс программы к лабораторной работе
1. Получить у преподавателя задание к лабораторной работе, которое должно содержать:
а) Номер варианта по методичке. По своему варианту необходимо найти степень характеристического многочлена C и коэффициенты данного многочлена d 0 ,…, d С.
б) Элементы начального блока A 1,…, A С.
в) Длину сигнальной посылки P.
г) Циклический сдвиг q.
Задание включает вычисление КФ пачки сигнальных посылок при значении циклического сдвига q = 0 для одного из характеристических многочленов таблицы 1. Кроме того, задание содержит исследовательские вопросы, такие как вычисление КФ сигнала при различных циклических сдвигах, при кодировании усеченным периодом ПМП, изучение влияния начального блока на величину боковых выбросов, определение характеристик боковых выбросов М-последовательностей.
2. Ознакомиться с подробным описанием программы и методикой подготовки начальных данных по руководству, имеющемуся в лаборатории. Составить план исследования, подготовить варианты ввода исходных данных для решения соответствующих вычислительных задач.
3. Реализовать программу вычисления КФ в вычислительном центре. На диске D необходимо создать папку с номером группы и в ней папку со своей фамилией. Далее по ходу работы сохраняйте все свои файлы в созданную папку.
4. Запустите на выполнение файл LAB3.EXE. При запуске появится следующее диалоговое окно – рис.32.
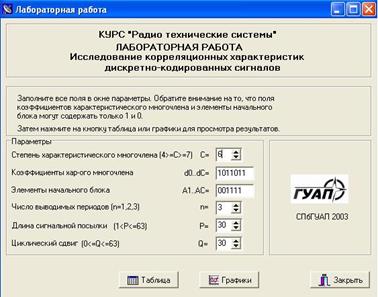
Рис. 32.
5. Используя клавиши перемещения курсора, введите заданные значения.
6. Для просмотра результатов расчета корреляционной функции созданной М-последовательности подведите курсор к позиции "Таблица" в меню "Просмотр результатов" и нажмите ENTER, как изображено на рис.33.
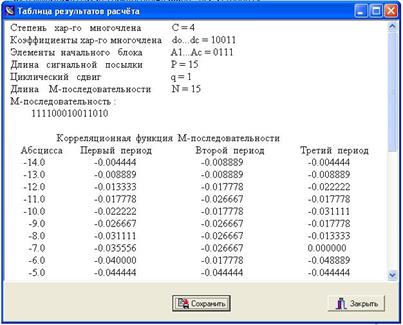
Рис. 33.
Сохраните результаты расчетов для дальнейшего использования их при оформлении отчета. Закройте окно «Таблица результатов расчета».
7. Результаты расчета в виде графика можно просмотреть, если выбрать позицию "Графики" в окне «Лабораторная работа» (рис. 34). Сохраните текущий период (графики КФ) для отчета и перейдите к следующему графику и т.д.
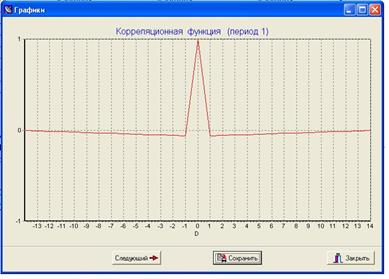
Рис. 34.
8. Составьте отчет.
6. Содержание и порядок оформления отчета
Отчет составляется в одном экземпляре на бригаду студентов и должен содержать следующие материалы:
– описание исходных данных и всех необходимых для вычисления КФ алгоритмов и функциональных соотношений;
– функциональную схему генератора ПМП для заданного характеристического многочлена;
– распечатки программ и результатов вычислений КФ;
– графики КФ для заданных вариантов исследования;
– результаты вычисления характеристик боковых выбросов;
– сравнительный анализ экспериментальных данных относительно уровня боковых выбросов КФ, выводы и рекомендации по использованию исследуемых кодирующих последовательностей в системах измерения параметров движения.
7. Контрольные вопросы
1. Что понимают под помехозащищенностью и помехоустойчивостью систем измерения параметров движения летательных аппаратов? С каким из этих понятий связано использование псевдослучайных (ПС) сигналов?
2. Какие параметры измерительной системы могут быть улучшены при использовании ПС сигналов?
3. Как сказывается измерение частотно-временной базы (база – произведение эффективной длительности сигнала на эффективную ширину его спектра) сложных сигналов на параметрах ФН и КФ? Каковы пути увеличения базы непрерывных и дискретных сигналов?
4. Как связаны технические показатели качества системы измерения параметров движения летательных аппаратов с параметрами ФН и КФ?
5. Каковы преимущества дискретных ПС сигналов перед непрерывными сложными сигналами?
6. Как связаны КФ реального радиосигнала, видеосигнала и соответствующей им кодирующей последовательности?
7. Нарисовать функциональную схему генератора ПМП для заданного преподавателем из таблицы 1 варианта характеристического многочлена.
8. Записать элементы кодирующей последовательности пачки сигнальных посылок с циклическим сдвигом q =1 для ПМП, определяемой характеристическим многочленом 1011, С =3.
9. Дать определение нормированной КФ сигнальной посылки и ее кодирующей последовательности.
10. Нарисовать функциональную схему корреляционного устройства обработки ПС сигналов.
8. Дополнительные вопросы для автотестирования.
Указать правильные ответы на вопросы 1 – 10.
1) Какими показателями характеризуются системы измерения параметров движения.
а) надежностью обнаружения и точностью измерения параметров сигнала от наблюдаемого объекта;
б) неоднозначностью оценки параметров сигналов и разрешающей способностью сигналов по измеряемым параметрам;
в) оба варианта верны;
г) другой (Ваш ответ).
2) От чего зависит точность совместного измерения дальности и скорости?
а) от произведения эффективной длительности сигнала на эффективную ширину его спектра;
б) от амплитуды сигнала;
в) от эффективной длительности сигнала;
г) от эффективной ширины спектра сигнала;
д) другой (Ваш ответ).
3) Как можно улучшить основные показатели систем измерения параметров движения:
а) уменьшить длительность импульса зондирующего сигнала;
б) использовать сложные зондирующие сигналы;
в) другой (Ваш ответ).
4) На что влияет скорость спадания главного лепестка функции неопределенности?
а) разрешающую способность по этим координатам и точность измерения рассогласований принимаемого сигнала по частоте и задержке;
б) комплексную огибающую сигнала;
в) несущую частоту;
г) другой (Ваш ответ).
5) Как происходит генерирование ПМП?
а) с помощью схемы С -разрядного регистра;
б) с помощью комбинационной логической схемы;
в) с помощью схемы С -разрядного регистра и комбинационной логической схемы в цепи обратной связи.
6) Максимально возможный период выходной М-последовательности:
а) N = 2 C - 1;
б) N = 2 C + 1
в) N = 2 C;
г) С.
7) Боковые выбросы для нормированной КФ непрерывной периодической последовательности будут составлять:
а) 1/ N;
б) N;
в) 1/Ö N;
г) 1/2 N.
8) Боковые выбросы для КФ единичной посылки, кодированной N элементами ПМП, будут составлять:
а) 1/ N;
б) N;
в) 1/Ö N;
г) 1/2 N.
д) другой (Ваш ответ).
9) Точность измерения несущей частоты повышается с учетом:
а) радиальной составляющей скорости «сближения» источника и приемника сигналов;
б) увеличения длительности сигнала.
в) верны оба ответа.
10) В типовой ситуации обработки сигналов на фоне гауссовской помехи с равномерной спектральной плотностью надежность обнаружения:
а) не зависит от формы сигнала;
б) определяется только отношением общей энергии к спектральной плотности мощности шума;
в) верны оба варианта;
г) другой (Ваш ответ).
Рекомендуемая литература
1. Теория и применение псевдослучайных сигналов. А.И.Алексеев, А.Г. Шереметьев, Г.И.Тузов, Б.И. Глазов. М.: Наука, 1969. 365с.
2. Теоретические основы радиолокации. В.Н. Голиков, И.Н. Бусыгин, Т.А. Костин и др.; /Под ред. Я.Д. Ширмана. М.: Советское радио, 1970. 560 с.
3. Вакман Д.Е. Сложные сигналы и принцип неопределенности в радиолокации. М.: Советское радио, 1965. 304с.
4. Кук Ч., Бернфельд М. Радиолокационные сигналы. Пер. с англ./Под ред. В.С. Кельзона. М.: Советское радио, 1971. 568с.
5. Шумоподобные сигналы в системах передачи информации./Под редакцией В.Б. Пестрякова. М.: Советское радио, 1973. 424с.
6. Варакин Л.Е. Системы связи с шумоподобными сигналами. М.: Радио и связь, 1985. 384с.
7. Помехоустойчивость информационных радиосистем управления. А.Г. Охонский, А.А. Елисеев, Н.В. Каймунова, А.Н. Кулин, Э.В. Минько./ Под ред. А.Г. Охонского. М.: Изд-во МГАП "Мир книги", 1993. 216с.
[1] Теорема Парсеваля записывается






