

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
История и методология науки и техники управления
Теория адаптивного управления
Адаптивное управление — совокупность методов теории управления, позволяющих синтезировать системы управления, которые имеют возможность изменять параметры регулятора или структуру регулятора в зависимости от изменения параметров объекта управления или внешних возмущений, действующих на объект управления. Подобные системы управления называются адаптивными. Адаптивное управление широко используется во многих приложениях теории управления
Применяется для управления нелинейной системой, или системой с переменными параметрами. К примерам таких систем относят, например, асинхронные машины, транспортные средства на магнитной подушке, магнитные подшипники и т.п. Среди механических систем можно назвать инверсный маятник, подъемно транспортные машины, роботы, шагающие машины, подводные аппараты, самолеты, ракеты, многие виды управляемого высокоточного оружия и т.п.
По характеру изменений в управляющем устройстве адаптивные системы делят на две большие группы:
самонастраивающиеся (изменяются только значения параметров регулятора)
самоорганизующиеся (изменяется структура самого регулятора).
По способу изучения объекта системы делятся на
Поисковые
беспоисковые.
В первой группе особенно известны экстремальные системы, целью управления которых является поддержание системы в точке экстремума статических характеристик объекта. В таких системах для определения управляющих воздействий, обеспечивающих движение к экстремуму, к управляющему сигналу добавляется поисковый сигнал. Беспоисковые адаптивные системы управления по способу получения информации для подстройки параметров регулятора делятся на
|
|
системы с эталонной моделью (ЭМ)
системы с идентификатором, в литературе иногда называют, как системы с настраиваемой моделью (НМ).
Адаптивные системы с ЭМ содержат динамическую модель системы, обладающую требуемым качеством. Адаптивные системы с идентификатором делятся по способу управления на
прямой
косвенный(непрямой).
При косвенном адаптивном управлении сначала делается оценка параметров объекта, после чего на основании полученных оценок определяются требуемые значения параметров регулятора и производится их подстройка. При прямом адаптивном управлении благодаря учёту взаимосвязи параметров объекта и регулятора производится непосредственная оценка и подстройка параметров регулятора, чем исключается этап идентификации параметров объекта. По способу достижения эффекта самонастройки системы с моделью делятся на
системы с сигнальной (пассивной)
системы с параметрической (активной) адаптацией.
В системах с сигнальной адаптацией эффект самонастройки достигается без изменения параметров управляющего устройства с помощью компенсирующих сигналов. Системы, сочетающие в себе оба вида адаптации называют
комбинированными.
Управление в условиях неопределенности.
Адаптиыные системы
Формализация – процесс построения информационных моделей с помощью формальных языков
Разные способы формализации задач управления при неполной информации, в одном подходе считается известными области которым принадлежат возмущенияЁ при другом подходе который называется вероятностным, неполнота информации интерпритируется как действие на систему случайных возмущенийс известными статистическими характеристиками
Самоорганизующиеся системы способны сохранять внутреннюю устойчивость при воздействии внешней среды, они находят способы самосохранения, чтобы не разрушаться и даже улучшать свою структуру.
|
|
Таким образом, сама логика научного развития, включая новые экспериментальные данные, потребовала в 50–60-х годах ХХ столетия перейти от рассмотрения слабонеравновесных к изучению сильнонеравновесных систем, от стационарных неравновесных состояний к исследованию неустойчивых неравновесных состояний.
Синтез одномерных линейных систем регулирования.
Проблемы моделирования объекта управления, прогноза возмущений.
Перспективы развития теории и техники управления
Измерение высоты полета.
Основными способами измерения высоты полета являются барометрический и радиотехнический.
Барометрический способ измерения высоты основан на принципе измерения атмосферного давления, закономерно изменяющегося с высотой. Барометрический высотомер представляет собой обыкновенный барометр, у которого вместо шкалы давлений поставлена шкала высот. Такой высотомер определяет высоту полета самолета косвенным путем, измеряя атмосферное давление, которое изменяется с высотой по определенному закону.
Барометрический способ измерения высоты связан с рядом ошибок, которые, если их не учитывать, приводят к значительным погрешностям в определении высоты. Несмотря на это, барометрические высотомеры ввиду простоты и удобства пользования широко применяются в авиации.
Радиотехнический способ измерения высоты основан на использовании закономерностей распространения радиоволн. Известно, что радиоволны распространяются с постоянной скоростью и отражаются от различных поверхностей. Используя эти свойства радиоволн, можно определять высоту полета самолета.
Принцип измерения высоты радиотехническим способом можно представить следующим образом. На самолете устанавливается передатчик и приемник. Передатчик излучает радиосигналы короткими импульсами, которые направляются антенной к земле и одновременно поступают на приемник. Дойдя до земной поверхности, сигналы отражаются и принимаются приемником, который связан с индикаторным устройством. Последнее по интервалу времени между поступлением в приемник прямого и отраженного радиосигналов определяет высоту полета самолета, которая отсчитывается по шкале.
Современные радиовысотомеры работают на частотном (радиовысотомеры малых высот) и на импульсном (радиовысотомеры больших высот) методах измерения высоты и показывают истинную высоту полета. Это является их преимуществом перед барометрическими высотомерами, так как барометрическая высота, как правило, отличается от истинной.
|
|
Измерение скорости полета.
Аэродинамический метод измерения воздушной скорости
Воздушной скоростью полета называется скорость перемещения самолета относительно воздушной среды. При этом различают истинную воздушную скорость и приборную скорость. Истинная воздушная скорость используется экипажем в целях самолетовождения, а приборная скорость используется летчиком для пилотирования самолета. Показания указателя воздушной скорости принято называть приборной скоростью.
В самолетовождении считают, что вектор воздушной скорости совпадает с продольной осью самолета и лежит в горизонтальной плоскости. Такое допущение существенно не влияет на точность решения навигационных задач. Приборы, предназначенные для измерения воздушной скорости полета, называются указателями скорости.
Наиболее распространенным методом измерения воздушной скорости полета является аэродинамический, основанный на замере давления встречного потока воздуха - скоростного напора. Величина скоростного напора определяется скоростью движения тела и плотностью воздуха:

где q - скоростной напор;
rн - массовая плотность воздуха;
V -воздушная скорость.
Отсюда воздушная скорость  .
.
Выразим массовую плотность rн через значения статического давления воздуха Р н=Р ст, абсолютной температуры воздуха на высоте полета Т н, газовой постоянной R и ускорения силы тяжести g:

Тогда
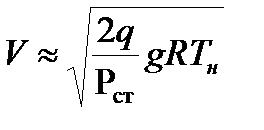

Таким образом, при малых скоростях полета для определения истинной воздушной скорости необходимо измерять динамическое давление, статическое давление и температуру воздуха на высоте полета. При переходе к истинным скоростям, превышающим 400 км/ч, необходимо учитывать сжимаемость воздуха. Поэтому тарировка современных указателей скорости производится по более сложным формулам.
Приемники воздушных давлений
|
|
Указатели скорости посредством трубопроводов соединяются с приемниками воздушного давления ПВД. В настоящее время применяются два типа ПВД: совмещенный и с раздельными системами замера давлений.
Совмещенный приемник воздушных давлений (Ошибка! Неизвестный аргумент ключа.) состоит из двух камер: динамической и статической. Динамическая камера состоит из собственно камеры / и латунной динамической трубки 2, имеющей в своей приемной части впаянное донышко 3 с боковым пазом для поступления воздуха. Донышко динамической трубки предохраняет ее от засорения. Динамическая трубка проходит вдоль всего приемника и заканчивается штуцером 4.

Рис. 1. Приемник воздушных давлений.
1-динамическая камера, 2 -динамическая трубка; 3- донышко; 4- штуцер динамический, 5-статическая камера, 6-штуцер статический, 7 - кожух, 8 - втулка, 9 - наконечник, 10 - элемент обогрева, 11, 12-контактные кольца, 13-изоляционная втулка, 14 - электропровода, 15 - латунные трубки, 16 - отверстия

Рис. 2. Общий вид указателя воздушной скорости УС-350
Статическая камера 5 отделена от динамической камеры перегородкой и имеет восемь расположенных, по окружности отверстий 16, посредством которых она сообщается с атмосферой. Штуцер 6 служит для соединения статической камеры со статическим штуцером корпуса указателя скорости. В кожухе 7 и во втулке 8 имеются три отверстия для отвода влаги из динамической камеры 1. Кожух и его наконечник 9, навинчивающийся на втулку 8, снаружи покрыты никелем.
Приемник снабжен электрообогревателем, предохраняющим его от обледенения. Электрообогреватель состоит из элемента обогрева 10, двух контактных колец 11 и 12, вставленных в изоляционную втулку 13, и двух электропроводов 14, расположенных в латунных трубках 15.
Второй тип приемника имеет раздельные системы замера полного и статического давления. Статическое давление подается через отверстие в борту фюзеляжа.
Устройство указателей воздушной скорости
В настоящее время применяются указатели скорости двух типов: указатели приборной скорости УС и комбинированные указатели скорости КУС. Первые устанавливаются на самолетах, вертолетах и планерах с небольшой скоростью полета, вторые - на скоростных самолетах.
Общий вид указателя приборной скорости УС-350 изображен на Рис. 2, а схема его механизма - на Ошибка! Источник ссылки не найден.. Чувствительным элементом указателя является манометрическая коробка 1. Она представляет собой две гофрированные мембраны, изготовленные из фосфористой бронзы и спаянные между собой по краям
К нижней стороне манометрической коробки припаян жесткий центр 2. Жесткий центр служит для крепления коробки к основанию механизма и для присоединения трубопровода 3, по которому поступает полное давление воздуха во внутреннюю полость чувствительного элемента. Второй конец трубопровода 3 припаян к штуцеру 4, укрепленному на задней стенке корпуса прибора. Штуцер 4 называется динамическим и обозначается буквами «Дн». К нему присоединяется трубопровод, идущий от штуцера динамической трубки приемника воздушных давлений.
|
|
К верхнему жесткому центру коробки припаяна стойка 5, к которой шарнирно прикреплена тяга 6 передаточного механизма. Второй конец тяги шарнирно соединен с рычагом 7 валика сектора. С противоположной стороны валика укреплен противовес 9, предназначенный для статической балансировки механизма. На оси валика 8 укреплен сектор 10, сцепленный с трибкой 11. Ось трибки находится в центре прибора, и на нее насажена стрелка. На оси трибки укреплена спиральная пружина 12, служащая для устранения люфтов и затираний в механизме. Механизм прибора не имеет температурной компенсации, так как температурная погрешность прибора практического значения не имеет.
Шкала прибора оттарирована в диапазоне скоростей от 50 до 350 км/ч. Цена деления 10 км/ч; деления оцифрованы через каждые 50 км/ч.
Теория гироскопа.
Гироскоп - это массивное аксиально-симметричное тело, вращающееся с большой угловой скоростью вокруг своей оси симметрии.
В этом случае моменты всех внешних сил, включая и силу тяжести, относительно центра масс гироскопа равны нулю. Это можно реализовать, например, поместив гироскоп в карданов подвес, изображенный на рис.1.

Рис.1
При этом

и момент импульса сохраняется:
L=const (2)
Гироскоп ведет себя так же, как и свободнее тело вращения. В зависимости от начальных условий возможны два варианта поведения гироскопа:
1. Если гироскоп раскручен вокруг оси симметрии, то направления момента импульса и угловой скорости совпадают:
 , (3)
, (3)
и направление оси симметрии гироскопа остается неизменным. В этом можно убедиться, поворачивая подставку, на которой расположен карданов подвес - при произвольных поворотах подставки ось гироскопа сохраняет неизменное направление в пространстве. По этой же причине волчок, "запущенный" на листе картона и подброшенный вверх (рис.2), сохраняет направление своей оси во время полета, и, падая острием на картон, продолжает устойчиво вращаться, пока не израсходуется запас его кинетической энергии.

Рис.2
Свободный гироскоп, раскрученный вокруг оси симметрии, обладает весьма значительной устойчивостью. Из основного уравнения моментов следует, что изменение момента импульса

Если интервал времени  мал, то и
мал, то и  мало, то есть при кратковременных воздействиях даже очень больших сил движение гироскопа изменяется незначительно. Гироскоп как бы сопротивляется попыткам изменить его момент импульса и кажется "затвердевшим".
мало, то есть при кратковременных воздействиях даже очень больших сил движение гироскопа изменяется незначительно. Гироскоп как бы сопротивляется попыткам изменить его момент импульса и кажется "затвердевшим".
Возьмем гироскоп конусообразной формы, опирающийся на стержень подставки в своем центре масс О (рис. 3). Если тело гироскопа не вращается, то оно находится в состоянии безразличного равновесия, и малейший толчок сдвигает его с места. Если же это тело привести в быстрое вращение вокруг своей оси, то даже сильные удары деревянным молотком не смогут сколько-нибудь значительно изменить направление оси гироскопа в пространстве. Устойчивость свободного гироскопа используется в различных технических устройствах, например, в автопилоте.

Рис.3
2. Если свободный гироскоп раскручен так, что вектор мгновенной угловой скорости и ось симметрии гироскопа не совпадают (как правило, это несовпадение при быстром вращении бывает незначительным), то наблюдается движение, описанное как "свободная регулярная прецессия". Применительно же к гироскопу его называют нутацией. При этом ось симметрии гироскопа, векторы L и  лежат в одной плоскости, которая вращается вокруг направления L=const с угловой скоростью, равной
лежат в одной плоскости, которая вращается вокруг направления L=const с угловой скоростью, равной  где
где  - момент инерции гироскопа относительно главной центральной оси, перпендикулярной оси симметрии. Эта угловая скорость (назовем ее скоростью нутации) при быстром собственном вращении гироскопа оказывается достаточно большой, и нутация воспринимается глазом как мелкое дрожание оси симметрии гироскопа.
- момент инерции гироскопа относительно главной центральной оси, перпендикулярной оси симметрии. Эта угловая скорость (назовем ее скоростью нутации) при быстром собственном вращении гироскопа оказывается достаточно большой, и нутация воспринимается глазом как мелкое дрожание оси симметрии гироскопа.
Нутационное движение легко продемонстрировать с помощью гироскопа, показанного на рис. 3 - оно возникает при ударах молотком по стержню вращающегося вокруг своей оси гироскопа. При этом чем сильнее раскручен гироскоп, тем больше его момент импульса L - тем больше скорость нутации и тем "мельче" дрожания оси фигуры. Этот опыт демонстрирует еще одну характерную особенность нутации - с течением времени она постепенно уменьшается и исчезает. Это - следствие неизбежного трения в опоре гироскопа.
Наша Земля - своего рода гироскоп, и ей тоже свойственно нутационное движение. Это связано с тем, что Земля несколько приплюснута с полюсов, в силу чего моменты инерции относительно оси симметрии и относительно оси, лежащей в экваториальной плоскости  различаются. При этом
различаются. При этом  , а
, а  . В системе отсчета, связанной с Землей, ось вращения движется по поверхности конуса вокруг оси симметрии Земли с угловой скоростью w0, то есть она совершает один оборот примерно за 300 дней. На самом деле в силу, как предполагается, неабсолютной жесткости Земли, это время оказывается больше - оно составляет около 440 суток. При этом расстояние точки земной поверхности, через которую проходит ось вращении, от точки, через которую проходит ось симметрии (Северный полюс), равно всего нескольким метрам. Нутационное движение Земли не затухает - по-видимому, его поддерживают сезонные изменения, происходящие на поверхности
. В системе отсчета, связанной с Землей, ось вращения движется по поверхности конуса вокруг оси симметрии Земли с угловой скоростью w0, то есть она совершает один оборот примерно за 300 дней. На самом деле в силу, как предполагается, неабсолютной жесткости Земли, это время оказывается больше - оно составляет около 440 суток. При этом расстояние точки земной поверхности, через которую проходит ось вращении, от точки, через которую проходит ось симметрии (Северный полюс), равно всего нескольким метрам. Нутационное движение Земли не затухает - по-видимому, его поддерживают сезонные изменения, происходящие на поверхности
2.7.1.1
Рис.4
Опытным путем можно установить, что угловая скорость прецессии зависит не только от величины силы F (рис.4), но и от того, к какой точке оси гироскопа эта сила приложена: с увеличением F и ее плеча l относительно точки закрепления О скорость прецессии увеличивается. При этом оказывается, что чем сильнее раскручен гироскоп, тем меньше угловая скорость прецессии при данных F и l.
В качестве силы F, вызывающей прецессию, может выступать сила тяжести, если точка закрепления гироскопа не совпадает с центром масс. Так, если стержень с быстро вращающимся диском подвесить на нитке (рис. 5), то он не опускается вниз, как это можно было бы предположить, а совершает прецессионное движение вокруг нитки. Наблюдение прецессии гироскопа под действием силы тяжести в некотором смысле даже удобнее - линия действия силы "автоматически" смещается вместе с осью гироскопа, сохраняя свою ориентацию в пространстве.
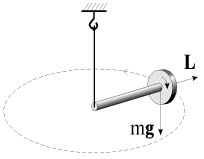
Рис.5
Можно привести и другие примеры прецессии - например, движение оси хорошо известной детской игрушки - юлы с заостренным концом (рис.6). Юла, раскрученная вокруг своей оси и поставленная на горизонтальную плоскость слегка наклонно, начинает прецессировать вокруг вертикальной оси под действием силы тяжести (рис.6).
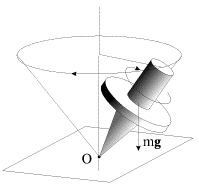
Рис.6
Точное решение задачи о движении гироскопа в поле внешних сил довольно выражение для угловой скорости прецессии можно легко получить в рамках так называемой элементарной теории гироскопа. В этой теории делается допущение, что мгновенная угловая скорость вращения гироскопа и его момент импульса направлены вдоль оси симметрии гироскопа. Другими словами, предполагается, что угловая скорость вращения гироскопа вокруг своей оси значительно больше угловой скорости прецессии:
 (5)
(5)
так что вкладом в L, обусловленным прецессионным движением гироскопа, можно пренебречь. В этом приближении момент импульса гироскопа, очевидно, равен
 (6)
(6)
где  - момент инерции относительно оси симметрии.
- момент инерции относительно оси симметрии.
Итак, рассмотрим тяжелый симметричный гироскоп, у которого неподвижная точка S (точка опоры о подставку) не совпадает с центром масс О (рис. 7).

Рис.7
Момент силы тяжести относительно точки S
 (7)
(7)
где θ - угол между вертикалью и осью симметрии гироскопа. Вектор M направлен по нормали к плоскости, в которой лежат ось симметрии гироскопа и вертикаль, проведенная через точку S (рис. 7). Сила реакции опоры проходит через S, и ее момент относительно этой точки равен нулю.
Изменение момента импульса L определяется выражением
dL=Mdt (8)
При этом и L, и ось волчка прецессируют вокруг вертикального направления с угловой скоростью  . Еще раз подчеркнем: делается допущение, что выполнено условие (5) и что Lпостоянно направлен вдоль оси симметрии гироскопа. Из рис.95 следует, что
. Еще раз подчеркнем: делается допущение, что выполнено условие (5) и что Lпостоянно направлен вдоль оси симметрии гироскопа. Из рис.95 следует, что
 (9)
(9)
В векторном виде
 (10)
(10)
Сравнивая (8) и (10), получаем следующую связь между моментом силы M, моментом импульса L и угловой скоростью прецессии :
 (11)
(11)
Это соотношение позволяет определить направление прецессии при заданном направлении вращения волчка вокруг своей оси.
Обратим внимание, что M определяет угловую скорость прецессии, а не угловое ускорение, поэтому мгновенное "выключение" M приводит к мгновенному же исчезновению прецессии, то есть прецессионное движение является безынерционным.
Сила, вызывающая прецессионное движение, может иметь любую природу. Для поддержания этого движения важно, чтобы вектор момента силы M поворачивался вместе с осью гироскопа. Как уже было отмечено, в случае силы тяжести это достигается автоматически. При этом из (11) (см. также рис. 7) можно получить:
 (12)
(12)
Если учесть, что в нашем приближении справедливо соотношение (6), то для угловой скорости прецессии получим

Следует отметить, что не зависит от угла  наклона оси гироскопа и обратно пропорциональна w, что хорошо согласуется с опытными данными.
наклона оси гироскопа и обратно пропорциональна w, что хорошо согласуется с опытными данными.
2.7.1.3
2.7.1.4
Рис.8
Характер траектории, по которой движется вершина гироскопа, зависит от начальных условий. В случае рис. 8, а гироскоп был раскручен вокруг оси симметрии, установлен на подставке под некоторым углом к вертикали и осторожно отпущен. В случае рис. 8, б ему, кроме того, был сообщен некоторый толчок вперед, а в случае рис. 8, в - толчок назад по ходу прецессии. Кривые на рис. 8 вполне аналогичны циклоидам, описываемым точкой на ободе колеса, катящегося по плоскости без проскальзывания или с проскальзыванием в ту или иную сторону. И лишь сообщив гироскопу начальный толчок вполне определенной величины и направления, можно добиться того, что ось гироскопа будет прецессировать без нутаций. Чем быстрее вращается гироскоп, тем больше угловая скорость нутаций и тем меньше их амплитуда. При очень быстром вращении нутации делаются практически незаметными для глаза.
Может показаться странным: почему гироскоп, будучи раскручен, установлен под углом к вертикали и отпущен, не падает под действием силы тяжести, а движется вбок? Откуда берется кинетическая энергия прецессионного движения?
Ответы на эти вопросы можно получить только в рамках точной теории гироскопам. На самом деле гироскоп действительно начинает падать, а прецессионное движение появляется как следствие закона сохранения момента импульса. В самом деле, отклонение оси гироскопа вниз приводит к уменьшению проекции момента импульса на вертикальное направление. Это уменьшение должно быть скомпенсировано моментом импульса, связанным с прецессионным движением оси гироскопа. С энергетической точки зрения кинетическая энергия прецессии появляется за счет изменения потенциальной энергии гироскопам.
Если за счет трения в опоре нутации гасятся быстрее, чем вращение гироскопа вокруг оси симметрии (как правило, так и бывает), то вскоре после "запуска" гироскопа нутации исчезают и остается чистая прецессия (рис. 9). При этом угол наклона оси гироскопа к вертикали  оказывается больше, чем он был вначале
оказывается больше, чем он был вначале  , то есть потенциальная энергия гироскопа уменьшается. Таким образом, ось гироскопа должна немного опуститься, чтобы иметь возможность прецессировать вокруг вертикальной оси.
, то есть потенциальная энергия гироскопа уменьшается. Таким образом, ось гироскопа должна немного опуститься, чтобы иметь возможность прецессировать вокруг вертикальной оси.

Рис.9
Гироскопические силы.
Обратимся к простому опыту: возьмем в руки вал АВ с насаженным на него колесом С (рис. 10). Пока колесо не раскручено, не представляет никакого труда поворачивать вал в пространстве произвольным образом. Но если колесо раскручено, то попытки повернуть вал, например, в горизонтальной плоскости с небольшой угловой скоростью приводят к интересному эффекту: вал стремится вырваться из рук и повернуться в вертикальной плоскости; он действует на кисти рук с определенными силами RA и RB (рис. 10). Требуется приложить ощутимое физическое усилие, чтобы удержать вал с вращающимся колесом в горизонтальной плоскости.

Рис. 10
Рассмотрим эффекты, возникающие при вынужденном вращении оси гироскопа, более подробно. Пусть ось гироскопа будет укреплена в U-образной раме, которая может поворачиваться вокруг вертикальной оси OO' (рис. 11). Такой гироскоп обычно называют несвободным - его ось лежит в горизонтальной плоскости и выйти из нее не может.

Рис. 11
Раскрутим гироскоп вокруг его вокруг его оси симметрии до большой угловой скорости (момент импульса L) и станем поворачивать раму с укрепленным в ней гироскопом вокруг вертикальной оси OO' с некоторой угловой скоростью как показано на рис. 11. Момент импульса L, получит при этом приращение dL которое должно быть обеспечено моментом сил M, приложенным к оси гироскопа. Момент M, в свою очередь, создан парой сил  возникающих при вынужденном повороте оси гироскопа и действующих на ось со стороны рамы. По третьему закону Ньютона ось действует на раму с силами
возникающих при вынужденном повороте оси гироскопа и действующих на ось со стороны рамы. По третьему закону Ньютона ось действует на раму с силами  (рис. 11). Эти силы называются гироскопическими; они создают гироскопический момент
(рис. 11). Эти силы называются гироскопическими; они создают гироскопический момент  . Появление гироскопических сил называют гироскопическим эффектом. Именно эти гироскопические силы мы и чувствуем, пытаясь повернуть ось вращающегося колеса (рис.10).
. Появление гироскопических сил называют гироскопическим эффектом. Именно эти гироскопические силы мы и чувствуем, пытаясь повернуть ось вращающегося колеса (рис.10).
Гироскопический момент нетрудно рассчитать. Положим, согласно элементарной теории, что
 (16)
(16)
где J- момент инерции гироскопа относительно его оси симметрии, а ω - угловая скорость собственного вращения. Тогда момент внешних сил, действующих на ось, будет равен
 (17)
(17)
где ω - угловая скорость вынужденного поворота (иногда говорят: вынужденной прецессии). Со стороны оси на подшипники действует противоположный момент
 (18)
(18)
Таким образом, вал гироскопа, изображенного на рис. 11, будет прижиматься кверху в подшипнике В и оказывать давление на нижнюю часть подшипника А.
Направление гироскопических сил можно легко найти с помощью правила, сформулированного Н.Е. Жуковским: гироскопические силы стремятся совместить момент импульса Lгироскопа с направлением угловой скорости вынужденного поворота. Это правило можно наглядно продемонстрировать с помощью устройства, представленного на рис. 12.
2.8 Гироскопические приборы, их назначение, классификация, требовании.
Основные типы гироскопов по количеству степеней свободы:
· двухстепенные,
· трехстепенные.
Основные два типа гироскопов по принципу действия:
· механические гироскопы,
· оптические гироскопы.
Также проводятся исследования по созданию ядерных гироскопов, использующих ЯМР для отслеживания изменения спина атомных ядер.[9]
2.8.1 Механические гироскопы[править | править вики-текст]
Среди механических гироскопов выделяется ро́торный гироско́п — быстро вращающееся твёрдое тело (ротор), ось вращения которого может свободно изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил. Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
2.8.1.1 Вибрационные гироскопы[править | править вики-текст]
Вибрационные гироскопы — устройства, сохраняющие поворачивающие или сохраняющие направление своих колебаний при повороте основания пропорционально угловой скорости (ДУС — датчики угловой скорости) или углу поворота основания (интегрирующие гироскопы). Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторными гироскопами. В англоязычной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» — хотя принцип их действия основан на эффекте действия силы Кориолиса, как и у роторных гироскопов.
Например, микромеханические вибрационные гироскопы применяются в системе измерения наклона электрического самоката Сегвей. Система состоит из пяти вибрационных гироскопов, чьи данные обрабатываются двумя микропроцессорами.
Подобные типы микрогироскопов используются в мобильных устройствах, в частности, в мультикоптерах, фотоаппаратах и видеокамерах (для управления стабилизацией изображения), в смартфонах и т.д[11].
Принцип работы
Два подвешенных грузика вибрируют на плоскости в MEMS-гироскопе с частотой {\displaystyle \scriptstyle \omega _{r}}.
При повороте гироскопа возникает Кориолисово ускорение равное {\displaystyle \scriptstyle {\vec {a}}_{c}=-2({{\vec {v}}\times {\vec {\Omega }}})}, где {\displaystyle \scriptstyle {\vec {v}}} — скорость и {\displaystyle \scriptstyle {\vec {\Omega }}} — угловая частота поворота гироскопа. Горизонтальная скорость колеблющегося грузика получается как: {\displaystyle \scriptstyle X_{ip}\omega _{r}\cos(\omega _{r}t)}, а положение грузика в плоскости — {\displaystyle \scriptstyle X_{ip}\sin(\omega _{r}t)}. Внеплоскостное движение {\displaystyle \scriptstyle y_{op}}, вызываемое поворотом гироскопа равно:
{\displaystyle y_{op}={\frac {F_{c}}{k_{op}}}={\frac {2m\Omega X_{ip}\omega _{r}\cos(\omega _{r}t)}{k_{op}}}}
где:
{\displaystyle \scriptstyle m} — масса колеблющегося грузика.
{\displaystyle \scriptstyle k_{op}} — коэффициент жёсткости пружины в направлении, перпендикулярном плоскости.
{\displaystyle \scriptstyle \Omega } — величина поворота в плоскости перпендикулярно движению колеблющегося грузика.
2.8.1.1.1 Разновидности [ править | править вики-текст ]

Гироскоп на МАКС-2009
· Пьезоэлектрические гироскопы.
· Твёрдотельные волновые гироскопы[12][13]. Работа одной из разновидностей ТВГ разработанные с 80-х гг. компаниями GE Marconi, GE Ferranti (ВБ), Watson Industires Inc. (США), Inertial Engineering Inc. (США) Innalabs, и другими основаны на управлении двумя стоячими волнами в физическом теле — резонаторе, который может быть как осесимметричным, так и циклически-симметричным. При этом, осесимметричная форма резонатора позволяет достичь характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа и его удароустойчивость, что критично для многих систем стабилизации. Резонаторы подобных КВГ вибрируют по второй форме колебаний (как и в HRG). Таким образом, стоячие волны — это колебания эллиптической формы с четырьмя пучностями и четырьмя узлами, расположенными по окружности края резонатора. Угол между смежными узлами / пучностями составляет 45 градусов. Эллиптическая форма колебаний возбуждается до определенной амплитуды. Когда гироскоп поворачивается вокруг оси чувствительности, результирующие Кориолисовы силы, воздействующие на элементы вибрирующей массы резонатора, возбуждают парную форму колебаний. Угол между главными осями двух режимов составляет 45 градусов. Замкнутый контур управления (компенсационная обратная связь — КОС) гасит парную форму колебания к нулю. Амплитуда силы (то есть сигнал пропорциональные току или электрическому напряжению в цепи КОС), необходимая для этого, пропорциональна угловой скорости вращения датчика. Соответствующая система замкнутого контура управления называется компенсационной аналогично КОС маятниковых акселерометров и классических роторных ДУС. Для генерирования компенсационной силы и считывания вызванных движений используются пьезоэлектрические элементы, закреплённые на резонаторе. Подобная электромеханическая система в высокой степени эффективна и обеспечивает низкий уровень шума выходного сигнала и широкий диапазон измерения, необходимые для многих «тактических» применений (хотя и снижает чувствительность датчика пропорционально расширению его диапазона измерений). Отметим, что упомянутые гироскопы используют современные сплавы инварного типа с паянными пьезоэлектрическими элементами ввода-вывода или пьезокерамические резонаторы с вжиганием электродов. В любом случае, их добротность теоретически ограничена величинами порядка 100 тыс. (на практике, обычно, не выше 20 тыс.), что на несколько порядков ниже много-миллионной добротности резонаторов КВГ из кварцевого стекла или монокристаллов, используемых для «стратегических» применений.
· Камертонные гироскопы.
· Вибрационные роторные гироскопы (в том числе динамически настраиваемые гироскопы)[14].
· МЭМС-гироскопы[14].
2.8.2 Оптические гироскопы[править | править вики-текст]
Основные статьи: Лазерный гироскоп, Волоконно-оптический гироскоп

Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером. Замкнутый контур имеет ответвление в датчик на базе интерферометра.
Делятся на лазерные (активные оптические) гироскопы, пассивные оптические гироскопы, волоконно-оптические и интегрально-оптические (ВОГи ИОГ). Принцип действия основан на эффекте Саньяка, открытом в 1913 году[14][15]. Теоретически он объясняется с помощью СТО. Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта[16]. В то время как в неинерциальной системе она может отличаться от c[17]. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно,
|
|
|

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!