Описанный в предыдущем разделе режим ШИМ имеет один недостаток. При изменении длительности импульсов меняется и их фаза. Центр каждого импульса как бы сдвигается во времени. При управлении электродвигателем такое поведение фазы нежелательно. Поэтому в микроконтроллерах АVR предусмотрен еще один режим ШИМ. Это ШИМ с точной фазой. Принцип работы таймера в этом режиме изображен на рис. 3.6.

Рис._____
Отличие режима «Phase Соrreсt PWМ» от режима «Fast PWМ» заключается в режиме работы счетчика. Сначала счетчик считает так же, как и в предыдущем режиме (от каждого входного импульса его значение увеличивается на единицу). Достигнув своего максимального значения, счетчик не сбрасывается в ноль, а переключается в режим реверсивного счета.
Теперь уже от каждого входного импульса его содержимое уменьшается на единицу. В результате пилообразная кривая, отображающая содержимое счетного регистра TCNТn, становится симметричной, как показано на рис. 3.6. Система совпадения работает так же, как и в предыдущем случае.
Благодаря симметричности сигнала на таймере, фаза выходных импульсов в процессе регулировки скважности не изменяется. Середина каждого импульса строго привязана к точке смены направления счета таймера.
Недостатком режима «Phase Соrreсt PWМ» можно считать в два раза меньшую частоту выходного сигнала. Это существенно уменьшает динамичность регулирования. Кроме того, при использовании внешних фильтров для преобразования импульсного сигнала ШИМ в аналоговый, схема с более низкой частотой потребует применения комплектующих с большими габаритами и массой.
6. Асинхронный режим

Интерфейсы «точка -точка»
1. Интерфейс <токовая петля>.
Интерфейс "токовая петля" используется для передачи информации с 1950-х годов. Первоначально в нем использовался ток 60 мА [Current]; позже, с 1962 года, получил распространение интерфейс с током 20 мА, преимущественно в телетайпных аппаратах. В 1980-х годах начала широко применяться "токовая петля" 4...20 мА в разнообразном технологическом оборудовании, датчиках и исполнительных устройствах средств автоматики. Популярность "токовой петли" начала падать после появления стандарта на интерфейс RS-485 (1983 г.) и в настоящее время в новом оборудовании она практически не применяется.
В передатчике "токовой петли" используется не источник напряжения, как в интерфейсе RS-485, а источник тока. По определению, ток, вытекающий из источника тока, не зависит от параметров нагрузки. Поэтому в "токовой петле" протекает ток, не зависящий от сопротивления кабеля  , сопротивления нагрузки
, сопротивления нагрузки  и э. д. с. индуктивной помехи
и э. д. с. индуктивной помехи  (рис. 2.10), а также от напряжения питания источника тока
(рис. 2.10), а также от напряжения питания источника тока  (см рис. 2.11). Ток в петле может измениться только вследствие утечек кабеля, которые очень малы.
(см рис. 2.11). Ток в петле может измениться только вследствие утечек кабеля, которые очень малы.
Это свойство токовой петли является основным и определяет все варианты ее применения. Емкостная наводка  , э. д. с. которой приложена не последовательно с источником тока, а параллельно ему, не может быть ослаблена в "токовой петле" и для ее подавления следует использовать экранирование (подробнее о борьбе с помехами см. раздел 3).
, э. д. с. которой приложена не последовательно с источником тока, а параллельно ему, не может быть ослаблена в "токовой петле" и для ее подавления следует использовать экранирование (подробнее о борьбе с помехами см. раздел 3).

|
| Рис. 2.10. Принцип действия "токовой петли"
|
В качестве линии передачи обычно используется экранированная витая пара, которая совместно с дифференциальным приемником позволяет ослабить индуктивную и синфазную помеху.
На приемном конце ток петли преобразуется в напряжение с помощью калиброванного сопротивления . При токе 20 мА для получения стандартного напряжения 2,5 В, 5 В или 10 В используют резистор сопротивлением 125 Ом, 250 Ом или 500 Ом соответственно.
Основным недостатком "токовой петли" является ее принципиально низкое быстродействие, которое ограничивается скоростью заряда емкости кабеля  от источника тока. Например, при типовой погонной емкости кабеля 75 пФ/м и длине 1 км емкость кабеля составит 75 нФ. Для заряда такой емкости от источника тока 20 мА до напряжения 5 В необходимо время 19 мкс, что соответствует скорости передачи около 9 кбит/с. На рис. 2.12 приведены зависимости максимальной скорости передачи от длины кабеля при разных уровнях искажений (дрожания), который оценивался также, как и для интерфейса RS-485 [Optically].
от источника тока. Например, при типовой погонной емкости кабеля 75 пФ/м и длине 1 км емкость кабеля составит 75 нФ. Для заряда такой емкости от источника тока 20 мА до напряжения 5 В необходимо время 19 мкс, что соответствует скорости передачи около 9 кбит/с. На рис. 2.12 приведены зависимости максимальной скорости передачи от длины кабеля при разных уровнях искажений (дрожания), который оценивался также, как и для интерфейса RS-485 [Optically].
Вторым недостатком "токовой петли", ограничивающим ее практическое применение, является отсутствие стандарта на конструктивное исполнение разъемов и электрические параметры, хотя фактически стали общепринятыми диапазоны токовых сигналов 0...20 мА и 4...20 мА; гораздо реже используют 0...60 мА. В перспективных разработках рекомендуется использовать только диапазон 4...20 мА, как обеспечивающий возможность диагностики обрыва линии (см. раздел "Аппаратное резервирование").
Интерфейс "токовая петля" распространен в двух версиях: цифровой и аналоговой.
Аналоговая "токовая петля"
 а)
а)
|
 б)
б)
|
| Рис. 2.11. Два варианта построения аналоговой "токовой петли": со встроенным в передатчик источником питания (а) и выносным (б)
|
Аналоговая версия "токовой петли" используется, как правило, для передачи сигналов от разнообразных датчиков к контроллеру или от контроллера к исполнительным устройствам. Применение "токовой петли" в данном случае дает два преимущества. Во-первых, приведение диапазона изменения измеряемой величины к стандартному диапазону обеспечивает взаимозаменяемость компонентов. Во-вторых, становится возможным передать сигнал на большое расстояние с высокой точностью (погрешность "токовой петли" может быть снижена до ±0,05%). Кроме того, стандарт "токовая петля" поддерживается подавляющим большинством производителей средств промышленной автоматизации.
В варианте "4...20 мА" в качестве начала отсчета принят ток 4 мА. Это позволяет производить диагностику целостности кабеля (кабель имеет разрыв, если ток равен нулю) в отличие от варианта "0...20 мА", где величина "0 мА" может означать не только нулевую величину сигнала, но и обрыв кабеля. Вторым преимуществом уровня отсчета 4 мА является возможность подачи энергии датчику для его питания.
На рис. 2.11 показаны два варианта построения аналоговой "токовой петли". В варианте а) используется встроенный незаземленный источник питания  , в варианте б) источник питания - внешний. Встроенный источник удобен при монтаже системы, а внешний удобен тем, что его можно выбрать с любыми параметрами в зависимости от поставленной задачи.
, в варианте б) источник питания - внешний. Встроенный источник удобен при монтаже системы, а внешний удобен тем, что его можно выбрать с любыми параметрами в зависимости от поставленной задачи.
Принцип действия обоих вариантов состоит в том, что при бесконечно большом коэффициенте усиления операционного усилителя (ОУ) напряжение между его входами равно нулю и поэтому ток через резистор  равен
равен  , а поскольку у идеального ОУ ток входов равен нулю, то ток через резистор строго равен току в петле
, а поскольку у идеального ОУ ток входов равен нулю, то ток через резистор строго равен току в петле  и, как следует из этой формулы, не зависит от сопротивления нагрузки. Поэтому напряжение на выходе приемника определяется как
и, как следует из этой формулы, не зависит от сопротивления нагрузки. Поэтому напряжение на выходе приемника определяется как  .
.
Достоинством схемы с операционным усилителем является возможность калибровки передатчика без подключенного к нему кабеля и приемника, поскольку вносимая ими погрешность пренебрежимо мала.

|
| Рис. 2.12. Зависимость максимальной скорости передачи "токовой петли" от длины неэкранированной витой пары 22 AWG при токе петли 20 мА
|
Напряжение источника выбирается такой, чтобы обеспечить работу транзистора передатчика в активном (ненасыщенном) режиме и скомпенсировать падение напряжения на проводах кабеля и сопротивлениях  , . Для этого выбирают
, . Для этого выбирают  , где
, где  - напряжение насыщения транзистора (1...2 В). Например, при типовых значениях
- напряжение насыщения транзистора (1...2 В). Например, при типовых значениях  500 Ом и сопротивлении кабеля 100 Ом (при длине 1 км) получим напряжение источника питания петли 22 В; ближайшее стандартное значение равно 24 В. Отметим, что мощность, связанная с избыточным напряжением источника питания по сравнению с рассчитанным значением, будет рассеиваться на транзисторе, что особенно существенно для интегральных передатчиков, не имеющих теплоотвода.
500 Ом и сопротивлении кабеля 100 Ом (при длине 1 км) получим напряжение источника питания петли 22 В; ближайшее стандартное значение равно 24 В. Отметим, что мощность, связанная с избыточным напряжением источника питания по сравнению с рассчитанным значением, будет рассеиваться на транзисторе, что особенно существенно для интегральных передатчиков, не имеющих теплоотвода.
В схемах на рис. 2.11 используется гальваническая развязка между входом передатчика и передающим каскадом. Она необходима для исключения паразитных связей между передатчиком и приемником, подробнее см. раздел "Защита от помех".
Примером передатчика для аналоговой токовой петли является модуль NL-4AO фирмы Reallab!, имеющий 4 канала вывода аналоговых сигналов, гальваническую развязку и предназначенный для вывода из компьютера и передачи на исполнительные устройства тока в стандарте 0...20 мА или 4...20 мА. Структура модуля приведена в разделе "Контроллеры для систем автоматизации". Модуль содержит микроконтроллер, который осуществляет связь с компьютером по интерфейсу RS-485, исполняет команды компьютера и выполняет компенсацию погрешностей преобразования с помощью коэффициентов, полученных при калибровке источников тока и хранимых в запоминающем устройстве ЭППЗУ (электрически программируемое постоянное запоминающее устройство). Преобразование цифровых данных в аналоговый сигнал выполняется с помощью 4-канального цифро-аналогового преобразователя (ЦАП). Для расширения функциональных возможностей модуль имеет также выходы напряжения (которые не имеют отношения к рассматриваемой теме).
2. Интерфейс RS-232 (UART).

Разъём DE-9, часто используемый для RS-232
RS-232 (англ. Recommended Standard 232, другое название EIA232 [1]) — стандарт физического уровня для асинхронного интерфейса (UART). Широко известен как последовательный порт персональных компьютеров. Исторически имел широкое распространение в телекоммуникационном оборудовании. В настоящее время используется для подключения к компьютерам широкого спектра оборудования, нетребовательного к скорости обмена, особенно при значительном удалении его от компьютера и отклонении условий применения от стандартных. В компьютерах, занятых офисными и развлекательными приложениями, практически вытеснен интерфейсом USB.
RS-232 обеспечивает передачу данных и некоторых специальных сигналов между терминалом (англ. Data Terminal Equipment, DTE) и коммуникационным устройством (англ. Data Communications Equipment, DCE) на расстояние до 15 метров на максимальной скорости (115200 бод). Так как этот интерфейс известен не только простотой программирования, но и неприхотливостью, в реальных условиях это расстояние увеличивается во много раз с примерно пропорциональным снижением скорости.
Протокол интерфейса предполагает два режима передачи данных синхронный и асинхронный, а также два метода управления обменом данных: аппаратный и программный. Каждый режим может работать с любым методом управления. В протоколе также предполагается вариант управления передачей данных по специальным сигналам, устанавливаемым хостом (DSR — сигнал состояния готовности, DTR — сигнал готовности передачи данных).
Для передачи данных по интерфейсу RS-232 используется код NRZ, который не является самосинхронизирующимся, поэтому для синхронизации используется стартовый и стоповый бит, позволяющие выделить битовую последовательность и синхронизировать приёмник с передатчиком
Изначально создавался для подключения телефонных модемов к компьютерам[ источник не указан 224 дня ]. В связи с такой специализацией имеет рудименты в виде, например, отдельной линии RING («звонок»). Постепенно телефонные модемы перешли на другие интерфейсы (USB), но разъём для RS-232 имелся на всех персональных компьютерах и многие изготовители оборудования использовали его для подключения своего оборудования. Например, компьютерные мыши.
В настоящее время чаще всего используется в промышленном и узкоспециальном оборудовании, встраиваемых устройствах. На портативных компьютерах (ноутбуках, нетбуках, КПК и т. п.) широкого применения RS-232 не нашел, однако материнские платы стационарных персональных компьютеров обычно ещё содержат RS-232 — либо в виде разъёма на задней панели, либо в виде колодки для подключения шлейфа на плате. Также возможно использование переходников-преобразователей.
Также этот стандарт используется для взаимодействия микроконтроллеров различных архитектур, имеющих в своем составе интерфейс UART, с другими цифровыми устройствами и периферией.
Принцип работы
RS-232 — проводной дуплексный интерфейс. Метод передачи данных аналогичен асинхронному последовательному интерфейсу UART.
Информация передаётся по проводам двоичным сигналом с двумя уровнями напряжения (код NRZ). Логическому «0» соответствует положительное напряжение (от +5 до +15 В для передатчика), а логической «1» — отрицательное (от −5 до −15 В для передатчика). Для электрического согласования линий RS-232 и стандартной цифровой логики UART выпускается большая номенклатура микросхем драйверов, например, MAX232.
Помимо линий входа и выхода данных, RS-232 регламентировал ряд необязательных вспомогательных линий для аппаратного управления потоком и специальных функций.
3. Интерфейс SPI.
SPI (англ. Serial Peripheral Interface, SPI bus — последовательный периферийный интерфейс, шина SPI) — последовательный синхронный стандарт передачи данных в режиме полного дуплекса, предназначенный для обеспечения простого и недорогого высокоскоростного сопряжения микроконтроллеров и периферии. SPI также иногда называют четырёхпроводным (англ. four - wire) интерфейсом.
В отличие от стандартного последовательного порта (англ. standard serial port), SPI является синхронным интерфейсом, в котором любая передача синхронизирована с общим тактовым сигналом, генерируемым ведущим устройством (процессором). Принимающая (ведомая) периферия синхронизирует получение битовой последовательности с тактовым сигналом. К одному последовательному периферийному интерфейсу ведущего устройства-микросхемы может присоединяться несколько микросхем. Ведущее устройство выбирает ведомое для передачи, активируя сигнал «выбор кристалла» (англ. chip select) на ведомой микросхеме. Периферия, не выбранная процессором, не принимает участия в передаче по SPI.
В SPI используются четыре цифровых сигнала:
· MOSI — выход ведущего, вход ведомого (англ. Master Out Slave In). Служит для передачи данных от ведущего устройства ведомому.
· MISO — вход ведущего, выход ведомого (англ. Master In Slave Out). Служит для передачи данных от ведомого устройства ведущему.
· SCLK или SCK — последовательный тактовый сигнал (англ. Serial Clock). Служит для передачи тактового сигнала для ведомых устройств.
· CS или SS — выбор микросхемы, выбор ведомого (англ. Chip Select, Slave Select).
Конкретные имена портов интерфейса SPI могут различаться в зависимости от производителя аппаратных средств, при этом возможны следующие варианты:
· MOSI: SIMO, SDI (на устройстве), DO, DON, SI, MRSR;
· MISO: SOMI, SDO (на устройстве), DI, DIN, SO, MTST;
· SCLK: SCK, CLK, SPC (SPI serial port clock);
· SS: nCS, CS, CSB, CSN, nSS, STE, SYNC.
Синхронизация в SPI[править | править код]
Частота следования битовых интервалов в линиях передачи данных определяется синхросигналом SCK, который генерирует ведущее устройство, ведомые устройства используют синхросигнал для определения моментов изменения битов на линии данных, при этом ведомые устройства никак не могут влиять на частоту следования битовых интервалов. Как в ведущем устройстве, так и в ведомом устройстве имеется счетчик импульсов синхронизации (битов). Счетчик в ведомом устройстве позволяет последнему определить момент окончания передачи пакета. Счетчик сбрасывается при выключении подсистемы SPI, такая возможность всегда имеется в ведущем устройстве. В ведомом устройстве счетчик обычно сбрасывается деактивацией интерфейсного сигнала SS.
Так как действия ведущего и ведомого устройства тактируются одним и тем же сигналом, то к стабильности этого сигнала не предъявляется никаких требований, за исключением ограничения на длительность полупериодов, которая определяется максимальной рабочей частотой более медленного устройства. Это позволяет использовать SPI в системах с низкостабильной тактовой частотой, а также облегчает программную эмуляцию ведущего устройства.
Прием и передача данных в SPI[править | править код]
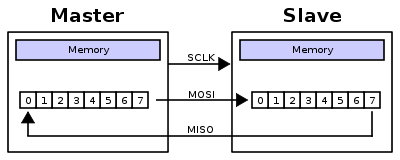
Типичная структура связей и линий интерфейса SPI
Передача осуществляется пакетами. Длина пакета, как правило, составляет 1 байт (8 бит), при этом известны реализации SPI с иной длиной пакета, например, 4 бита. Ведущее устройство инициирует цикл связи установкой низкого уровня на выводе выбора подчиненного устройства (SS) того устройства, с которым необходимо установить соединение. При низком уровне сигнала SS:
· схемотехника ведомого устройства находится в активном состоянии;
· вывод MISO переводится в режим «выход»;
· тактовый сигнал SCLK от ведущего устройства воспринимается ведомым и вызывает считывание на входе MOSI значений передаваемых от ведущего битов и сдвиг регистра ведомого устройства.
Подлежащие передаче данные ведущее и ведомое устройства помещают в сдвиговые регистры. После этого ведущее устройство начинает генерировать импульсы синхронизации на линии SCLK, что приводит к взаимному обмену данными. Передача данных осуществляется бит за битом от ведущего по линии MOSI и от ведомого по линии MISO. Передача осуществляется, как правило, начиная со старших битов, но некоторые производители допускают изменение порядка передачи битов программными методами. После передачи каждого пакета данных ведущее устройство, в целях синхронизации ведомого устройства, может перевести линию SS в высокое состояние.
Режимы работы интерфейса SPI[править | править код]
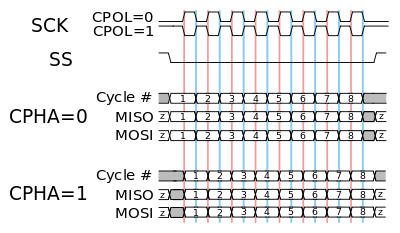
Временные диаграммы работы интерфейса SPI:
При CPOL=0: CPHA = 0 (красная вертикальная линия) и CPHA = 1 (синяя вертикальная линия)
При CPOL=1: CPHA = 1 (красная вертикальная линия) и CPHA = 0 (синяя вертикальная линия)
Возможны четыре комбинации фазы (CPHA) и полярности (CPOL) сигнала SCLK по отношению к сигналам данных. Режимы работы определяются комбинацией бит CPHA и CPOL:
· CPOL = 0 — сигнал синхронизации начинается с низкого уровня;
· CPOL = 1 — сигнал синхронизации начинается с высокого уровня;
· CPHA = 0 — выборка данных производится по переднему фронту сигнала синхронизации;
· CPHA = 1 — выборка данных производится по заднему фронту сигнала синхронизации.
Для обозначения режимов работы интерфейса SPI принято следующее соглашение:
· режим 0 (CPOL = 0, CPHA = 0);
· режим 1 (CPOL = 0, CPHA = 1);
· режим 2 (CPOL = 1, CPHA = 0);
· режим 3 (CPOL = 1, CPHA = 1).
Топология систем связи на базе SPI[править | править код]
В простейшем случае к ведущему устройству подключено единственное ведомое устройство и необходим двусторонний обмен данными. В таком случае используется трехпроводная схема подключения. Интерфейс SPI позволяет подключать к одному ведущему устройству несколько ведомых устройств, причем подключение может быть осуществлено несколькими способами.
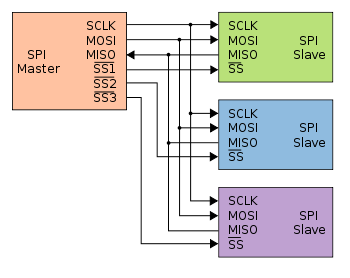
Радиальная структура связи с несколькими ведомыми устройствами через SPI
Первый способ позволяет реализовать радиальную структуру связи (топология типа «звезда»), его принято считать основным способом подключения нескольких ведомых устройств. В данном случае для обмена более чем с одним ведомым устройством ведущее устройство должно формировать соответствующее количество сигналов выбора ведомого устройства (SS). При обмене данными с ведомым устройством, соответствующий ему сигнал SS переводится в активное (низкое) состояние, при этом все остальные сигналы SS находятся в неактивном (высоком) состоянии. Выводы данных MISO ведомых устройств соединены параллельно, при этом они находятся в неактивном состоянии, а перед началом обмена один из выходов (выбранного ведомого устройства) переходит в активный режим.
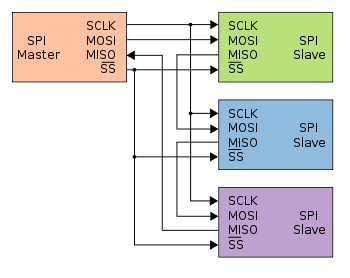
Кольцевая структура связи с несколькими ведомыми устройствами через SPI
Второй способ позволяет реализовать структуру связи типа «кольцо». В данном случае для активации одновременно нескольких ведомых устройств используется один сигнал SS, а выводы данных всех устройств соединены последовательно и образуют замкнутую цепь. При передаче пакета от ведущего устройства этот пакет получает первое ведомое устройство, которое, в свою очередь, транслирует свой пакет следующему ведомому устройству и так далее. Для того, чтобы пакет от ведущего устройства достиг определенного ведомого устройства, ведущее устройство должно отправить еще несколько пакетов.
Преимущества и недостатки интерфейса SPI[править | править код]
Преимущества[править | править код]
· Полнодуплексная передача данных по умолчанию.
· Более высокая пропускная способность по сравнению с I²C или SMBus.
· Возможность произвольного выбора длины пакета, длина пакета не ограничена восемью битами.
· Простота аппаратной реализации:
o более низкие требования к энергопотреблению по сравнению с I²C и SMBus;
o возможно использование в системах с низкостабильной тактовой частотой;
o ведомым устройствам не нужен уникальный адрес, в отличие от таких интерфейсов, как I²C, GPIBили SCSI.
· Используется только четыре вывода, что гораздо меньше, чем для параллельных интерфейсов.
· Однонаправленный характер сигналов позволяет при необходимости легко организовать гальваническую развязку между ведущим и ведомыми устройствами.
· Максимальная тактовая частота ограничена только быстродействием устройств, участвующих в обмене данными.
Недостатки[править | править код]
· Необходимо больше выводов, чем для интерфейса I²C.
· Ведомое устройство не может управлять потоком данных.
· Нет подтверждения приема данных со стороны ведомого устройства (ведущее устройство может передавать данные «в никуда»).
· Нет определенного стандартом протокола обнаружения ошибок.
· Отсутствие официального стандарта, что делает невозможным сертификацию устройств.
· По дальности передачи данных интерфейс SPI уступает таким стандартам, как UART и CAN.
· Наличие множества вариантов реализации интерфейса.
· Отсутствие поддержки горячего подключения устройств.






