Вопросы, рассматриваемые на лекции. Трение в поступательных парах. Трение во вращательных кинематических парах. Трение в высших кинематических парах. Трение гибких тел. Жидкостное трение.
Некоторые основные понятия.
Сила трения- сопротивление, возникающее на поверхности двух соприкасающихся тел при относительном их движении. Сопротивление возникает в результате шероховатости соприкасающихся тел, в зоне фактического контакта происходит сцепление, возникают упругие, вязкие и пластические деформации, развиваются силы молекулярного взаимодействия.
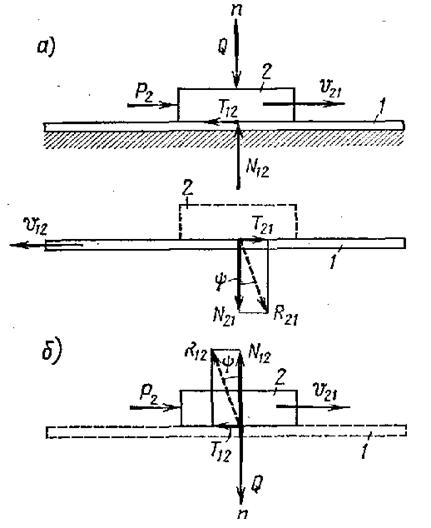
Рис.42. Действие сил в поступательной паре
По видам относительного движения различают: трение скольжения (в высших и низших кинематических парах) и трение качения (в высших парах).
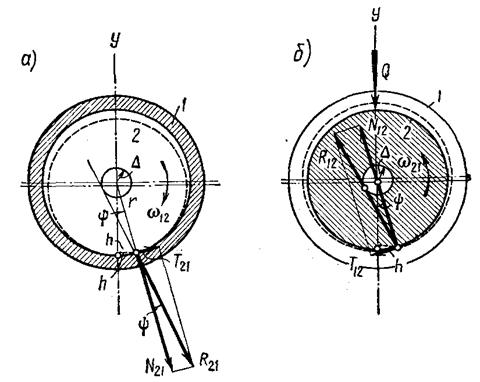
Рис.43. Действие сил во вращательной паре
Лекция 16. Виброзащита механизмов и машин. Уравновешивание вращающихся звеньев.
Вопросы, рассматриваемые на лекции. Ударная и вибрационная зашита машин. Снижение виброактивности источников колебаний. Виброгашение (активная виброизоляция). Виброизоляция (пассивная виброизоляция). Колебания в механизмах.
Некоторые основные понятия.
Виброзащита- совокупность методов и средств оценки виброактивности и уменьшения уровня вибраций.

Рис.44. Катковый инерционный динамический гаситель
При постановке задач виброзащиты в исследуемой системе выделяют: источник колебаний, объект виброзащиты, связи, соединяющие источник колебаний и объект виброзащиты.

Рис.45. Двойной катковый инерционный гаситель
Виды механических воздействий: линейные перегрузки, вибрационные воздействия, ударные воздействия.
Основные методы виброзащиты: снижение виброактивности источника колебаний, изменение конструкции объекта виброзащиты, динамическое гашение колебаний, виброизоляция.
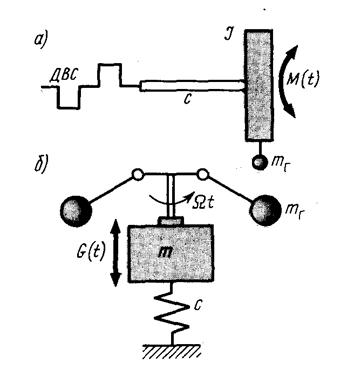
Рис.46 Маятниковый инерционный динамический гаситель а) крутильных колебаний; б) продольных колебаний.
Лекция 17. Основные понятия теории машин-автоматов.
Вопросы, рассматриваемые на лекции. Основы теории роботов-манипуляторов. Структура кинематических цепей роботов-манипуляторов. Циклограммы и тактограммы технологических машин.
Некоторые основные понятия.
Машина-автомат- машина, в которой преобразования энергии, материалов и информации выполняются без участия человека.
Автоматическая линия- совокупность машин-автоматов, соединенный между собой транспортными устройствами и предназначенных для выполнения определенного технологического процесса.
Исполнительное звено- каждое твердое тело машины-автомата, выполняющее заданные перемещения с целью обеспечения технологического процесса.
Числовое программное обеспечение. Самонастраивающаяся система управления.
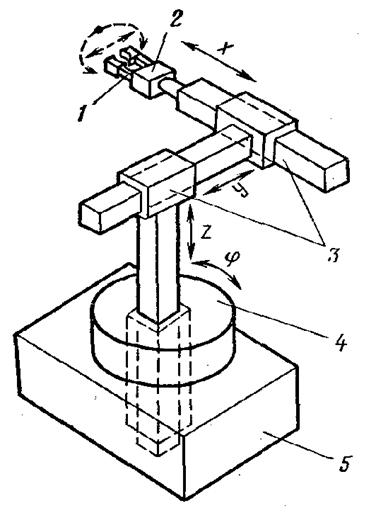
Рис.47
Манипулятор- это техническое устройство, автоматически воспроизводящее функции руки человека при выполнении вспомогательных и транспортных производственных операций посредством перемещения объекта в пространстве.
Автооператор- манипулятор, работающий по жесткой программе и оперирующий штучными объектами по общему циклу машины.
Промышленный робот- манипулятор с изменяемой программой, представляющий собой автономно функционирующую машину-автомат, предназначенную для воспроизведения некоторых двигательных и умственных функций человека при выполнении вспомогательных и основных производственных операций.
Оглавление
Лекция 1. Введение. Структура механизмов. 1
Лекция 2. Кинематический анализ механизмов. 6
Лекция 3. Построение кинематических диаграмм. 9
Лекция 4. Кинематический анализ и синтез кулачковых механизмов. 11
Лекция 6. Синтез эвольвентного зубчатого зацепления. 16
Лекция 7. Синтез многозвенных зубчатых механизмов. 20
Лекция 8. Механизмы передач с гибкими звеньями. Винтовые механизмы. 23
Лекция 9. Механизм универсального шарнира. Механизм двойного универсального шарнира. 24
Лекция 10. Механизмы фрикционных передач. Мальтийский механизм. Гидравлические пневматические механизмы. 26
Лекция 11. Динамический анализ механизмов. 28
Лекция 12. Механическая характеристика машины. 29
Лекция 13. Движение механизмов машины под действием приложенных сил. 30
Лекция 14. Неравномерность хода машины при установившемся движении. 32
Лекция 15. Трение в кинематических парах. 37
Лекция 16. Виброзащита механизмов и машин. Уравновешивание вращающихся звеньев. 38
Лекция 17. Основные понятия теории машин-автоматов. 40





