Электроприводами с асинхронными двигателями
Способы управления асинхроннымидвигателями. Электропривод с АД и тиристорным регулятором напряжения, с АД и импульсным регулятором скорости в цепи ротора
Частотное управление асинхронным двигателем. Основные соотношения и схема замещения АД при частотном управлении. Закон Костенко. Законы частотного управления при постоянном, вентиляторноммоментах и моменте нагрузки, обратно пропорциональном скорости
Электропривод с двухзвенными преобразователями частоты. Электропривод с непосредственным преобразователем частоты. Их схемы
Комплектный электропривод с асинхронным двигателем, его работа
Литература: [10], с. 136-146;[11], с. 134-185
Тема 2.6 Дискретные электроприводы с шаговыми
Двигателями
Классификация шаговых двигателей (ШД). Принцип работы, способы управления и режимы работы ШД
Основные элементы шагового электропривода. Системы управления шаговым ЭП
Литература: [10], с. 146-152;[11], с. 185-213
Тема 2.7 Электроприводы с вентильными двигателями
Конструкция и принцип работы вентильных двигателей (ВД). Силовые преобразователи электроприводов с вентильными двигателями. Способы регулирования их скорости
Литература: [10], с. 152-155;[11], с. 213-246
Тема 2.8 Следящий электропривод
Назначение, классификация и область применения следящих электроприводов. Структурная схема следящего электропривода
Литература: [10], с. 155-162;[11], с. 246-262
Раздел 3 Комплексные автоматические системы управления
Электроприводами
Тема 3.1 Системы с программным управлением
Виды систем программного управления. Числовое программное управление. Структуры позиционных и контурных систем с числовым программным управлением (ЧПУ)
Цикловое программное управление оборудованием. Функциональный состав цикловых систем программного управления
Литература: [10], с. 162-173;[11], с. 289-367
Тема 3.2 Микропроцессорные средства управления
Электроприводами
Микропроцессорные системы управления. Функциональная схема электропривода с микропроцессорным управлением
Программируемые контроллеры (ПК), их основные свойства и функциональный состав. Программное обеспечение ПК
Литература: [10], с. 162-173;[11], с. 261-289
Тема 3.3 Адаптивные системы автоматического управления
Электроприводами
Адаптивное управление. Классы адаптивных систем: самонастраивающиеся, самоорганизующиеся, самообучающиеся. Экстремальные системы. Системы стабилизации
Литература:[10], с. 173-177
Раздел 4 Надежность систем автоматического управления
Электроприводами
Надежность, безотказность, ремонтопригодность, долговечность. Восстанавливаемые и невосстанавливаемые объекты. Отказы: внезапный, постепенный, независимый, полный, частичный. Показатели безотказности и ремонтопригодности
Метод расчета по среднегрупповым значениям интенсивности отказов. Коэффициентный метод расчета надежности
Литература: [10], с. 193-204;[11], с. 368-378
Список используемых источников
1 ГОСТ Р 50369-92. Электропривод. Термины и определения.
2 ГОСТ 24.104.85. Автоматизированные системы управления. Общие требования.
3 ГОСТ 2.702-75 ЕСКД. Правила выполнения электрических схем.
4 ГОСТ 2.710-81 ЕСКД. Обозначения буквенно-цифровые в электрических схемах.
5 ГОСТ 2.701-84 ЕСКД. Схемы. Виды и типы. Общие требование к выполнению.
6 Камнев, В.Н. Чтение схем и чертежей электроустановок / В.Н.Камнев. – М.: Высшая школа, 1990.
7Кацман, М.М. Электрический привод / М.М.Кацман. – М.: Академия, 2005.
8 Михайлов, О.П. Автоматизированный электропривод станков и промышленных роботов / О.П.Михалов. – М.: Машиностроение, 1990.
9Москаленко, В.В. Электрический привод / В.В.Москаленко. – М.: Высшая школа, 2000.
10 Москаленко, В.В. Системы автоматизированного управления электропривода / В.В.Москаленко. – М.: ИНФРА, 2004.
11Системы автоматизированного управления электроприводами: учебное пособие / Г.И.Гульков, Ю.Н.Петренко [и др.]; под редакцией Ю.Н.Петренко. – Минск: ООО «Новое знание», 2004.
12Усатенко, С.Т. Выполнение электрических схем по ЕСКД: справочник / С.Т.Усатенко, Т.К.Каченюк, М.В.Терехова. – М.: Изд.-во стандартов, 1989.
Перечень примерных вопросов к экзамену по учебной
дисциплине «Системы автоматического управления
Электроприводами»
Теоретические вопросы
1Опишите назначение и функции систем автоматизированного управления электроприводами.
2 Охарактеризуйте электрические аппараты ручного управления. Укажите параметры расчетаи выбора.
3 Охарактеризуйте электрические аппараты дистанционного управления. Укажите параметры расчета и выбора.
4 Охарактеризуйте аппараты защиты систем управления электроприводом. Укажите параметры расчета и выбора.
5 Опишите принцип построения типовой схемы одноступенчатого пуска двигателя постоянного тока независимого возбуждения в функции времени.
6 Опишите принцип построения типовой схемы одноступенчатого пуска ДПТ НВ в функции времени и динамического торможения.
7 Опишите принцип построения типовой схемы пуска ДПТ НВ в функции тока.
8 Опишите принцип построения типовой схемы пуска АД с короткозамкнутым ротором.
9 Опишите принцип построения типовой реверсивной схемы пуска АД с короткозамкнутым ротором.
10 Опишите принцип построения типовой схемы прямого пуска АД и динамического торможения в функции времени.
11 Опишите принцип работы типовой панели управления ДПТ, обеспечивающей пуск, динамическое торможение и регулирование скорости ослаблением магнитного потока.
12 Опишите принцип работы типовых узлов управления током возбуждения синхронных ЭД.
13 Поясните особенности синхронных электродвигателей (СД). Укажите виды способов пуска СД, приведите примеры схем.
14 Опишите принцип работы схемы пуска АД с фазным ротором.
15 Поясните принцип работы узлов защиты от короткого замыкания и перегрузки ДПТ и АД. Изобразите схемы.
16 Поясните принцип работы узлов защиты от обрыва фазы и от самозапуска (нулевая защита) ЭД. Изобразите схемы.
17 Приведите примеры и поясните принцип работы блокировок в схемах управления ЭП.
18Укажите виды торможений асинхронных двигателей. Опишите узлы схем динамического торможения АД.
19 Укажите виды торможений асинхронных двигателей. Опишите узлы схем противовключения АД.
20Опишите принцип работы схемы пуска АД с фазным ротором.
21Опишите принцип работы схемы пуска АД с фазным ротором в одну ступень в функции времени и динамического торможения в функции скорости.
22Опишите, как осуществляется тиристорное управление асинхронными двигателями. Приведите примеры схем и поясните работу.
23Опишите принцип работы схемы управления пуском СД в функции тока статора.
24 Охарактеризуйте назначение и характеристики датчиков тока замкнутых систем ЭП на основе трансформаторов тока.
25 Охарактеризуйте назначение и характеристики датчиков тока замкнутых систем ЭП на основе шунта.
26 Охарактеризуйте назначение и характеристики датчиков тока замкнутых систем ЭП на основе элемента Холла.
27 Охарактеризуйте назначение и характеристики потенциометрических датчиков напряжения.
28 Охарактеризуйте назначение и характеристики датчиков скорости замкнутых систем электропривода.
29 Охарактеризуйте назначение и характеристики датчиков положения замкнутых систем электропривода – вращающихся трансформаторов.
30 Охарактеризуйте назначение и характеристики датчиков положения замкнутых систем электропривода – сельсинов.
31 Охарактеризуйте назначение и характеристики датчиков положения замкнутых систем электропривода – индуктосинов и магнесинов.
32 Приведите классификацию элементов замкнутых систем управления электроприводами. Опишите назначение аналоговых регуляторов на операционных усилителях, приведите примеры схемы «П» и «И»- регуляторов, изобразите временные диаграммы работы.
33 Опишите назначение аналоговых регуляторов на операционных усилителях, приведите пример схемы пропорционально- интегрального и пропорционально- интегрально-дифференциального регуляторов, изобразите временные диаграммы работы.
34 Охарактеризуйте назначение и устройство аналоговых регуляторов на основе ОУ: «П», «И», «ПИ», «ПИД».
35 Объясните принцип работы и устройство силовых тиристоров схем регулируемого электропривода. Изобразите диаграммы напряжений.
36 Охарактеризуйте способы защиты силовых тиристоров. Изобразите схемы.
37 Охарактеризуйте способы запирания тиристоров. Изобразите схемы.
38 Охарактеризуйте способы управления тиристорами силовых преобразователей: амплитудное, фазовое, амплитудно-фазовое, фазоимпульсное.
39 Объясните назначение СИФУ и охарактеризуйте принципы управления по способу сдвига импульсов.
40 Объясните назначение узлов в структурной схеме СИФУ.
41 Охарактеризуйте разновидности схем управляемых тиристорных преобразователей для питания якоря ДПТ.
42 Объясните сущность и принципы совместного управления комплектами вентилей реверсивного тиристорного преобразователя.
43 Объясните сущность и принципы раздельного управления комплектами вентилей реверсивного тиристорного преобразователя.
44 Охарактеризуйтедвухзонное регулирование скорости в тиристорных электрических приводах.
45 Охарактеризуйте принципы импульсного управления напряжением якоря ДПТ (ШИМ, ЧИМ).
46 Объясните принцип работы ШИП с параллельной емкостной коммутацией.
47 Объясните принцип работы замкнутой системы «П-Д» с отрицательной обратной связью по скорости. Изобразите структурную схему.
48 Объясните принцип работы замкнутой системы «П-Д» с нелинейной отрицательной связью по току.
49 Объясните принцип работы замкнутой системы «П-Д» с обратной связью по скорости и отсечкой по току.
50 Объясните принцип построения системы управления с подчиненным регулированием координат.
51Объяснитье принцип регулирования скорости асинхронных ЭД изменением напряжения с помощью тиристорных преобразователей в замкнутых САУ.
52 Объясните сущность импульсного регулирования скорости АД с фазным ротором в замкнутой САУ.
53 Опишите способ частотного регулирования скорости асинхронных электродвигателей.
54 Объясните принцип работы вентильного электродвигателя.
55 Объясните принцип работы вентильного ЭП по структурной схеме.
56 Объясните принцип работы шагового электродвигателя.
57 Объясните принцип работы шагового ЭП по структурной схеме.
58 Объясните принцип работы следящего ЭП с двигателем постоянного тока релейного действия.
59 Объясните принцип работы следящего ЭП с асинхронным двигателем пропорционального действия.
60 Объясните принцип регулирования скорости асинхронных ЭП с частотными преобразователями со звеном постоянного тока.
61 Объясните принцип регулирования скорости частотных ЭП с непосредственными преобразователями частоты.
62Назовите основные показатели и качественные характеристики надежности системы управления. Поясните методы расчета надежности.
Практические задачи
1Составьте схему управления, которая обеспечивает прямой пуск асинхронного двигателя с короткозамкнутым ротором и его торможение противовключением в функции времени.
2 ДПТ типа 4ПФ160S имеет следующие данные: РНОМ=11 кВт, UHOM= 220 В, h=70,5 %. Рассчитайте номинальный ток плавкой вставки предохранителя.
3 Рассчитайте коэффициент усиления и постоянную времени интегрирования «ПИ»-регулятора, если Rос=20 кОм, RBX=100 Ом, Сос=47 пФ.
4 Асинхронный двигатель с короткозамкнутым ротором типа AИP100L4включен по схеме и имеет следующие номинальные данные: мощность Рном = 4кВт, напряжение UHOМ = 220 В, КПД h НОМ= 85%, коэффициент мощности cosj HOM= 0,84, кратность пускового тока по отношению к номинальному току статора равна 6. Рассчитайте номинальный ток плавкой вставки FU.
5 Асинхронный двигатель с короткозамкнутым ротором типа 4АН200L4УЗ и имеет следующие номинальные данные: мощность Рном = 55кВт, напряжение UHOМ = 220 В, КПД h НОМ= 92%, коэффициент мощности cosj HOM= 0,89, кратность пускового тока по отношению к номинальному току статора равна 6,5. Рассчитайтеуставку реле максимального тока FA.
6 Рассчитайте параметры элементов цепи обратной связи операционного усилителя для реализации на его основе ПИ-регулятора с постоянной времени 1с и коэффициентом усиления 7, если Rвх = 10 Ом.
7 Схема электропривода приведена на рисунке. Какие изменения в работе электропривода произойдут при пуске в случае, если время срабатывания реле KV будет меньше времени срабатывания реле КА?
8 Схема электропривода приведена на рисунке. Какие изменения в работе электропривода произойдут в случае, если контакт аппарата КМ в цепи катушки реле времени КТ обгорит или приварится (т.е. эта цепь будет постоянно разомкнута или замкнута)?
9 Схема электропривода приведена на рисунке. К каким последствиям в работе электропривода приведет обгар контакта аппарата КМ в цепи катушки контактора КМ1?
10 Составьте схему управления, которая обеспечивает прямой пуск асинхронного двигателя с короткозамкнутым ротором и его торможение противовключением в функции времени.
11 Постройте схему нулевой защиты ДПТ.
12 Постройте схему пуска АД и останова в функции времени.
13 Постройте схему пуска ДПТ и останова в функции пути.
14 Составьте схему управления, которая обеспечивает прямой пуск асинхронного двигателя с короткозамкнутым ротором и его торможение противовключением в функции времени.
15 Постройте схему пуска АД и реверса в функции пути.
16 Постройте схему пуска ДПТ и реверса в функции пути.
17 Постройте на контактных элементах схему, реализующую функцию:  .
.
18 Постройте схему нулевой защиты ДПТ.
19 Составьте схему управления, которая обеспечивает прямой пуск асинхронного двигателя с короткозамкнутым ротором и его торможение противовключением.
20 Постройте на контактных элементах схему, реализующую функцию:  .
.
21 Составьте схему управления, которая обеспечивает прямой пуск ДПТ и его торможение противовключением в функции времени.
22 Постройте схему пуска ДПТ в одну ступень в функции времени.
23 Постройте схему, обеспечивающую пуск АД и останов в функции времени.
24 Составьте схему управления, которая обеспечивает прямой пуск АД и его торможение противовключением в функции времени.
25 Двигатель постоянного тока 4ПФ132S имеет следующие номинальные паспортные данные: Рном=11 кВт, напряжение питания UHOM=220 В, ток якоря IHOМ = 61,5 A, nном=1060 об/мин, h=78%.Рассчитайте номинальный момент и скорость идеального холостого хода.
26 Двигатель постоянного тока 4ПФ132S имеет следующие номинальные паспортные данные: Рном=11 кВт, напряжение питания UHOM=220 В, ток якоря IHOМ = 61,5 A, nном=1060 об/мин, h=78%.Рассчитайте номинальный момент и скорость идеального холостого хода.
27 Двигатель постоянного тока 4ПФ132S имеет следующие номинальные паспортные данные: Рном=11 кВт, напряжение питания UHOM=220 В, ток якоря IHOМ = 61,5 A, nном=1060 об/мин, h=78%.Рассчитайте номинальный момент и скорость идеального холостого хода.
28 Двигатель постоянного тока 4ПФ132S имеет следующие номинальные паспортные данные: Рном=11 кВт, напряжение питания UHOM=220 В, ток якоря IHOМ = 61,5 A, nном=1060 об/мин, h=78%.Рассчитайте номинальный момент и скорость идеального холостого хода.
29 Составьте схему управления, которая обеспечивает прямой пуск АД и его торможение противовключением в функции времени.
30 Двигатель постоянного тока 4ПФ 132 S имеет следующие номинальные паспортные данные: Рном=11 кВт, напряжение питания UHOM=220 В, ток якоря IHOМ = 61,5 A, nном=1060 об/мин, h=78%.Рассчитайте номинальный момент и скорость идеального холостого хода.
31 Составьте схему управления, которая обеспечивает прямой пуск АД и его торможение противовключением в функции времени.
Задания на домашнюю контрольную работу по учебной
дисциплине «Системы автоматического управления
Электроприводами»
Теоретические вопросы
1 Опишите назначение и функции систем автоматизированного управления электроприводами.
2 Укажите, в функции каких параметров осуществляется пуск двигателей постоянного тока. Объясните назначение резисторов в цепи якоря при пуске. Опишите узел схемы пуска двигателя постоянного тока (ДПТ) параллельного возбуждения в функции ЭДС.
3 Укажите, в функции каких параметров осуществляется пуск двигателей постоянного тока. Объясните назначение резисторов в цепи якоря при пуске. Опишите узел схемы пуска двигателя постоянного тока (ДПТ) параллельного возбуждения в функции тока.
4 Укажите, в функции каких параметров осуществляется пуск двигателей постоянного тока. Объясните назначение резисторов в цепи якоря при пуске. Опишите узел схемы пуска двигателя постоянного тока (ДПТ) параллельного возбуждения в функции времени.
5 Укажите, по каким принципам строятся схемы управления торможением ДПТ. Приведите примеры узлов схем управления динамическим торможением ДПТ.
6 Опишите виды защит, применяемые в релейно-контакторных схемах управления. Приведите примеры реализации защиты от перегрузки и короткого замыкания.
7 Опишите виды защит, применяемые в релейно-контакторных схемах управления. Приведите примеры реализации нулевой защиты.
8Опишите виды защит, применяемые в релейно-контакторных схемах управления. Объясните назначение защиты от обрыва цепи обмотки возбуждения, приведите пример.
9 Укажите, в функции каких величин осуществляется управление асинхронным двигателем с фазным ротором. Опишите схему пуска АД с фазным ротором в функции времени.
10 Опишите, как осуществляется пуск асинхронных двигателей с короткозамкнутым ротором. Объясните назначение резисторов в цепи статора.
11 Укажите, как осуществляется пуск асинхронных двигателей с короткозамкнутым ротором. Опишите схему реверса АД с короткозамкнутым ротором.
12Опишите виды торможений асинхронных двигателей. Приведите примеры и опишите узлы схем динамического торможения и противовключения АД.
13Поясните особенности синхронных электродвигателей (СД). Укажите виды способов пуска СД, приведите примеры схем.
14 Опишите, как осуществляется тиристорное управление асинхронными двигателями. Приведите примеры схем и поясните работу.
15 Поясните, как осуществляется синтез систем автоматического управления на контактных и бесконтактных элементах. Рассмотрите пример синтеза системы на контактных элементах.
16 Поясните, как осуществляется синтез систем автоматического управления на контактных и бесконтактных элементах. Рассмотрите пример синтеза системы на бесконтактных элементах.
17 Опишите, как осуществляется проектирование бесконтактных схем управления на основе релейно-контакторных схем. Приведите пример реализации бесконтактной схемы, соответствующей схеме реверса асинхронного электродвигателя.
18Приведите классификацию элементов замкнутых систем управления электроприводами. Опишите назначение аналоговых регуляторов на операционных усилителях, приведите примеры схемы пропорционального иинтегрального регуляторов, изобразите временные диаграммы работы.
19 Приведите классификацию элементов замкнутых систем управления электроприводами. Опишите назначение аналоговых регуляторов на операционных усилителях, приведите пример схемы пропорционально- интегрального и пропорционально- интегрально-дифференциального регуляторов, изобразите временные диаграммы работы.
20Опишите назначение датчиков координат замкнутых систем управления электроприводами. Поясните принцип работы трансформаторных датчиков тока и элементов Холла.
21 Опишите назначение датчиков координат замкнутых систем управления электроприводами. Поясните принцип работы датчиков напряжения, ЭДС якоря и датчиков скорости.
22 Опишите назначение датчиков координат замкнутых систем управления электроприводами. Поясните принцип работы датчиков положения – вращающихся трансформаторов и сельсинов.
23 Опишите принципы управления тиристорами в системах импульсно-фазового управления, приведите временные диаграммы.
24 Опишите назначение основных узлов структурной схемы вертикальной СИФУ (системы импульсно-фазового управления), приведите структурную схему и временные диаграммы работы.
25Объясните основные принципы управления тиристорами (совместное и раздельное)в реверсивных выпрямителях. Опишите функциональную схему и схему замещения.
26 Опишите принцип работы систем с двухзонным регулированием скорости на примере функциональной схемы электропривода ЭПУ1-2Д.
27 Опишите принцип регулирования напряжения в системе «Импульсный преобразователь-двигатель постоянного тока», укажите отличия широтно-импульсной модуляции от частотно-импульсной. Объясните работу реверсивного и нереверсивного электропривода с ПШИУ по функциональной схеме.
28 Опишите принцип построения, структуру и функции замкнутых систем управления электроприводами. Объясните структуру систем подчинённого регулирования.
29Опишите способ регулирования скорости асинхронных электродвигателей путём изменения напряжения с помощью симметричных и несимметричных тиристорных регуляторов напряжения.
30 Опишите способ импульсного регулирования скорости асинхронных электродвигателей, поясните на примере схемы импульсного регулирования в цепи ротора.
31Опишите способ частотного регулирования скорости асинхронных электродвигателей.
32 Опишите принцип работы преобразователя частоты со звеном постоянного тока для асинхронных электродвигателей, приведите схемы автономных инверторов тока и напряжения.
33 Опишите принцип работы преобразователя частоты без звена постоянного тока (с непосредственным преобразователем частоты) для асинхронных электродвигателей.
34 Опишите принцип работы замкнутой системы частотного электропривода по функциональной схеме.
35 Опишите принцип работы и особенности конструкции шагового электродвигателя и поясните работу шагового электропривода по функциональной схеме.
36 Опишите принцип работы и особенности конструкции вентильного электродвигателя и поясните работу вентильного электропривода по функциональной схеме.
37 Опишите типы и назначение систем управления положением, поясните работу системы на примере функциональной схемы.
38 Раскройте понятие программного управления, опишите функции позиционных и контурных ЧПУ, объясните принцип кодирования информации.
39 Опишите назначение и преимущества микропроцессорного управления электроприводами, опишите функциональную схему электропривода с микропроцессорным управлением.
40Приведите основные понятия и показатели надёжности, поясните методы расчёта надёжности по среднегрупповым значениям интенсивностей отказа и коэффициентный метод.
Практические задачи
Задача№1
Составьте релейно-контакторную схему автоматизированного управления двигателем постоянного тока независимого возбуждения (ДПТ НВ). Начертите и опишите работу схемы, указанной в соответствующем задании таблицы 1.
Таблица1- Варианты заданий для выполнения задачи 1
| Номер
задания
| Наименование схемы
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 2 и динамического торможения в функции ЭДС (использовать реле напряжения).
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 1 и торможения свободным выбегом в функции пути (использовать путевой выключатель).
|
|
| Схема пуска ДПТ НВ в функции ЭДС (использовать реле напряжения), число ступеней 2 и динамического торможения в функции времени.
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 2 и торможения свободным выбегом.
|
|
| Схема пуска ДПТ НВ в функции времени, реверс и торможение противовключением в функции ЭДС. Применить минимальную токовую защиту от обрыва цепи обмотки возбуждения.
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 1 и динамического торможения в функции времени.
|
|
| Схема пуска ДПТ с последовательным возбуждением в функции тока и торможение в функции пути (использовать путевой выключатель).
|
Продолжение таблицы 1
| Номер
задания
| Наименование схемы
|
|
| Схема пуска ДПТ НВ в функции ЭДС (использовать реле напряжения), число ступеней 3 и торможения свободным выбегом.
|
|
| Схема управления ДПТ НВ, обеспечивающая пуск, динамическое торможение и регулирование скорости ослаблением магнитного потока
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 2 и торможения свободным выбегом.
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 1 и торможения свободным выбегом.
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 2. Реверс и торможение противовключением в функции ЭДС.
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 2 и динамического торможения в функции пути (использовать путевой выключатель).
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 2 и динамического торможения в функции времени.
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 3 и торможения свободным выбегом.
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 3 и торможения свободным выбегом. Применить нулевую защиту с использованием реле напряжения.
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 2 и реверса в функции ЭДС.
|
|
| Схема пуска ДПТ НВ в функции времени, число ступеней 3 и торможения свободным выбегом.
|
|
| Схема пуска ДПТ НВ в функции времени в одну ступень и динамического торможения в функции ЭДС (использовать реле напряжения)
|
|
| Схема пуска ДПТ НВ в функции времени в одну ступень и торможения свободным выбегом в функции пути (использовать путевой выключатель)
|
Задача № 2
Составьте релейно-контакторную схему автоматизированного управления асинхронным двигателем (АД). Схема должна обеспечить защиту от токов короткого замыкания в силовой цепи и цепи управления, нулевую защиту и защиту от перегрузок. Начертите и опишите работу схемы, указанной в соответствующем заданиипо таблице 2.
Таблица 2 - Варианты заданий для выполнения задачи 2
| Номер
задания
| Наименование схемы
|
|
| Схема управления двухскоростным нереверсивным АД с короткозамкнутым ротором. Пуск без ограничения тока и момента (прямой пуск) и торможение свободным выбегом. Схема должна обеспечить две скорости АД путем соединения обмотки статора в треугольник или двойную звезду.
|
|
| Схема пуска АД с короткозамкнутым ротором без ограничения тока и момента (прямой пуск) и динамического торможения в функции скорости.
|
|
| Схема пуска АД с фазным ротором в функции времени, число ступеней 2 и торможения свободным выбегом. Схема обеспечивает защиту от короткого замыкания и перегрузки.
|
|
| Схема управления двухскоростным нереверсивным АД с короткозамкнутым ротором. Пуск без ограничения тока и момента (прямой пуск) и торможение свободным выбегом. Схема должна обеспечить две скорости АД путем соединения обмотки статора в треугольник или двойную звезду и при переходе с одной скорости на другую необходимо предварительно нажать кнопку “стоп”, электрическую блокировку от возможного одновременного включения контакторов большой и малой скорости.
|
|
| Схема пуска АД с короткозамкнутым ротором без ограничения тока и момента (прямой пуск) реверс и торможение свободным выбегом. Схема должна обеспечивать реверс без промежуточного нажатия кнопки “Стоп” и электрическую блокировку от возможного одновременного включения контакторов “Вперед” и “Назад”.
|
|
| Схема пуска АД с короткозамкнутым ротором без ограничения тока и момента (прямой пуск) и динамическое торможение в функции времени.
|
|
| Схема пуска АД с фазным ротором в функции времени в две ступени и торможение свободным выбегом. Схема обеспечивает защиту от короткого замыкания и перегрузки.
|
|
| Схема пуска АД с короткозамкнутым ротором без ограничения тока и момента (прямой пуск) и торможение противовключением с двух рабочих мест.
|
|
| Схема пуска АД с фазным ротором без ограничения тока и момента (прямой пуск) и торможения противовключением в функции ЭДС. Электромагнитный тормоз фиксирует положение вала электродвигателя в обесточенном состоянии.
|
|
| Схема пуска АД с фазным ротором в функции времени в одну ступень и динамического торможения в функции скорости.
|
Методические рекомендации по выполнению задач
Домашней контрольной работы
Методические рекомендации повыполнению задачи № 1
При построении схемы следует использовать типовые схемы релейно-контакторного управления ДПТ НВ, описанные в [7], с.323-329; [9], с. 260-268;[10], с. 87-1011;[11], с. 14-25. Необходимо объяснить назначение аппаратов и порядок их срабатывания.
Размерыэлементов должны соответствовать ГОСТ (Приложение А, таблица А.1). Контакты аппаратов изображаются в обесточенном состоянии.
Методические рекомендации по выполнению задачи № 2
При построении схемы следует использовать типовые схемы релейно-контакторного управления АД, описанные в [7], с. 311-323;[9], с. 269-280; [10], с. 100-118;[11], с. 25-38. Указать, какие аппараты обеспечивают защиту от токов короткого замыкания в силовой цепи и цепи управления, нулевую защиту и защиту от перегрузок.
Размеры элементов должны соответствовать ГОСТ (Приложение А, таблица А.1). Контакты аппаратов изображаются в обесточенном состоянии.
Таблица 3– Варианты заданий на домашнюю контрольную работу по учебной дисциплине «Системы
автоматического управления электроприводами»
| Предпоследняя
цифра шифра
| Последняя цифра шифра
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1, 41
| 2, 42
| 3, 43
| 4, 44
| 5, 45
| 6, 46
| 7, 47
| 8, 48
| 9, 49
| 10, 50
|
|
| 11, 51
| 12, 52
| 13, 53
| 14, 54
| 15, 55
| 16, 56
| 17, 57
| 18, 58
| 19, 59
| 20, 60
|
|
| 21, 50
| 22, 49
| 23, 48
| 24, 47
| 25, 46
| 26, 45
| 27, 44
| 28, 43
| 29, 42
| 30, 41
|
|
| 31, 41
| 32, 42
| 33, 43
| 34, 44
| 35, 45
| 36, 46
| 37, 47
| 38, 48
| 39, 49
| 40, 50
|
|
| 14, 50
| 17, 55
| 18, 56
| 19, 57
| 25, 58
| 20, 59
| 22, 60
| 21, 40
| 13, 42
| 24, 41
|
|
| 4, 42
| 12, 47
| 27, 43
| 15, 48
| 19, 44
| 23, 49
| 27, 45
| 16, 46
| 30, 50
| 18, 51
|
|
| 1, 49
| 5, 50
| 21, 51
| 19, 52
| 11, 53
| 40, 54
| 34, 55
| 24, 56
| 15, 57
| 13, 58
|
|
| 10, 59
| 6, 60
| 26, 45
| 29, 46
| 28, 43
| 3, 49
| 17, 42
| 31, 43
| 5, 47
| 25, 50
|
|
| 21, 48
| 25, 47
| 12, 45
| 23, 49
| 34, 50
| 35, 41
| 14, 52
| 12, 53
| 33, 54
| 19, 55
|
|
| 31, 56
| 21, 57
| 9, 58
| 3, 59
| 7, 44
| 17, 40
| 27, 58
| 18, 47
| 28, 49
| 29, 42
|
Приложение А
(обязательное)
Таблица А.1 – Размеры условных обозначений электротехнических
аппаратов
| Наименование
| Изображение
| Позиционные обозначения
|
| Катушка, индуктивности, обмотка
| 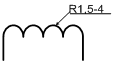
| L
|
| Трансформатор однофазный двухобмоточный с ферромагнитным сердечником
Трансформатор трехфазный с ферромагнитныммагнитопроводом
| 
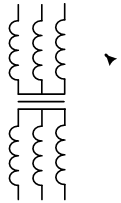
| TV
TV
|
| Двигатель постоянного тока с независимым возбуждением
|

| M
|
| Асинхронный двигатель с короткозамкнутым ротором
| 
| М
|
Продолжение таблицы А.1
| Наименование
| Обозначение
| Позиционные обозначения
|
| Конденсатор
| 
| С
|
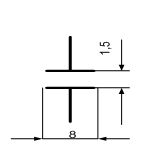
| Резистор
| 
| R
|
| Предохранитель
| 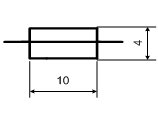
| FU
|
| Контакт замыкающий
| 
| K
|
| Контакт размыкающий
| 
| K
|
| Выключатель кнопочный
|      
| SB
|
Продолжение таблицы А.1
| Наименование
| Обозначение
| Позиционные
обозначения
|
| Контакт коммутационного устройства:
а) замыкающий, с замедлителем
при срабатывании
б) размыкающий, с замедлителем при размыкании
| 
|
KT
KT
|
| Катушка реле времени
| 
| KT
|
| Лампа накаливания (осветительная и сигнальная)
| 
| HL
|
| Заземление
| 
|
|
| Диод
| |






