методические ошибки:
Они обусловлены двойной модуляцией сигналов цели при излучении и приеме вращающейся диаграммой направленности и конечной скоростью распространения радиоволн.
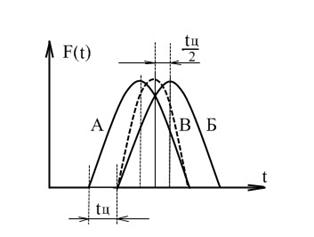
Рис. 11
На Рис.12 положение диаграммы направленности А –соответствует моменту излучения, Б – положение ДН в момент приема, В – результирующая ДН. Таким образом, за время равное tц (время распространения электромагнитной энергии до цели и обратно) диаграмма направленности повернется на угол Δφ≡ 
Временные развертки ДН (Рис.13) при передаче А, при приеме Б и результирующая В имеют разные фазы. Так как фаза опорного сигнала определяется фазой вращения ДНА на излучение (реальная ДН), а фаза огибающей сигнала ошибки определяется фазой вращения результирующей ДН, то возникает разность фаз между опорным напряжением Uоп и сигнала ошибки Ucо.

Рис. 12
Эта разность фаз и является методической ошибкой:
Δφм=Ωск  Fск
Fск  Fск(3.6)
Fск(3.6)
tц=180ºtц  (3.7)
(3.7)
Таким образом, методическая ошибка в РТК с коническим сканированием воздействует на фазу сигнала ошибки и в следящих координаторах не оказывает существенного влияния на точность измерения углов координат, так как при взятии цели на автосопровождение (АС) РСН перемещается на цель.
В РТК с фиксированной осью эта ошибка приводит непосредственно к ошибкам измерения координат.
-ошибки за счет флюктуаций амплитуд принимаемых от цели сигналов
Флюктуация амплитуды принимаемых сигналов приводят к возникновению паразитной амплитудной модуляции, что вызывает паразитный сигнал ошибки.
Паразитная флюктуация возникает и тогда, когда цель находится на РСН. Ошибка эта случайна и среднеквадратическая ошибка определения углов координат вычисляется по формуле:
σεц =σβц =  mэф
mэф  (3.8)
(3.8)
где:
mэф –эффективная глубина модуляции вызванная флюктуациями,
Кmg –крутизна модуляционной характеристики,
Sm(Fcк) и Sm(0)–энергетическая спектральная плотность на частоте сканирования и нулевой частоте,
ΔFкц –полоса пропускания приемника угловой следящей системы,
ΔFn –эквивалент полосы помехи.
Соотношение  и ΔFnопределяется из графика (Рис.14):
и ΔFnопределяется из графика (Рис.14):
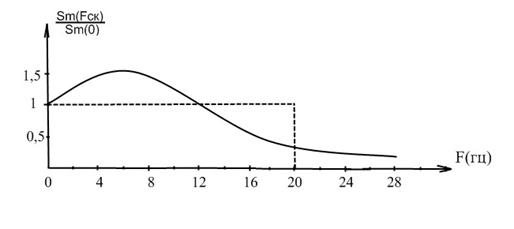
Рис.13
Перспективы развития моноимпульсных вторичных
Радиолокаторов в ГА РФ
В настоящее время можно выделить два основных направления совершенствования радиолокаторов с активным ответом. Первое – модернизация существующих ВРЛ, улучшение их тактико-технических и эксплуатационных характеристик. Второе направление – создание принципиально новой системы ВРЛ, а именно ВРЛ с дискретно-адресным запросом и реализацией в дальнейшем S – адресного режима работы системы ВРЛ.
Вторичный радиолокатор ближайшего будущего с традиционным форматом сигнала – это высоконадёжная комплексная система, имеющая антенну с вертикальным раскрывом, одноканальный передатчик, построенный на твёрдотельных элементах, приёмный тракт, выполненный на гибридных интегральных микросхемах, микрополосковых линиях с использованием методов термовакуумного напыления элементов, это мощная многофункциональная аппаратура обработки и декодирования ответных сигналов. В основе его работы лежит моноимпульсный метод радиолокации. Его средний ресурс должен быть порядка 100 000 ч., при наработке на отказ  (Для ВРЛ «Корень-АС» значения этих показателей соответственно равны 40000 ч. и 1500 ч.).
(Для ВРЛ «Корень-АС» значения этих показателей соответственно равны 40000 ч. и 1500 ч.).
Задачи, решаемые ДАС ВРЛ, привели к использованию новых для ВРЛ форм сигналов и методов модуляции – запрос и передача информации в канале «Земля – борт» осуществляется с помощью кодово-импульсной относительной фазовой модуляции (КИМ ОФМ); в канале «борт – Земля» модуляция кодово-импульсная (КИМ).
К характеристикам ВРЛ, работающим в режиме S, предъявляются более жёсткие требования. В частности, для обеспечения высоких точностных характеристик радиолокационного определения координат ВС и оптимального использования времени канала, антенно-фидерный тракт, приёмное устройство и аппаратура обработки должны обеспечивать моноимпульсное измерение координат ВС. Использование моноимпульсного приёма позволяет, в свою очередь, снизить скорость опроса, что в сочетании с улучшенной обработкой ответных сигналов в режиме RBS/УВД существенно уменьшает их искажение. Кроме того, допуск на нестабильность частоты должен составлять  для возможности реализации дифференциально-фазовой модуляции. Однако все эти требования одновременно позволяют улучшить характеристики ВРЛ и обычного формата.
для возможности реализации дифференциально-фазовой модуляции. Однако все эти требования одновременно позволяют улучшить характеристики ВРЛ и обычного формата.
Моноимпульсная наземная станция и наземная станция режима S имеют значительно более высокие точностные характеристики по сравнению с существующими вторичными РЛС, и поэтому могут обеспечить меньшие минимумы эшелонирования на большом расстоянии. Так, если значения СКО лучших современных зарубежных обычных ВРЛ по дальности  , по азимуту
, по азимуту  = 0,150, то для моноимпульсных вторичных радиолокаторов (МВРЛ)
= 0,150, то для моноимпульсных вторичных радиолокаторов (МВРЛ)  и
и 






