Выберем в качестве зондирующего сигнала простой сигнал с базой равной 1 (радиоимпульсы с прямоугольной огибающей, рис.2.2.1). Выбор является предварительным. После расчета импульсной мощности передатчика Pи, если она превысит допустимое для наземных РЛС значение 1 МВт/имп, зададимся приемлемой импульсной мощностью и возьмем в качестве зондирующего сигнала сложный сигнал.

Рис. 1 Временная и спектральная диаграммы радиоимпульсов, отраженных от цели ипоступающих на вход РПрУ
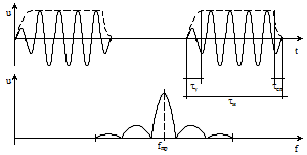
Рис. 2 Временная и спектральная диаграммы сигнала на выходе линейной части РПрУ
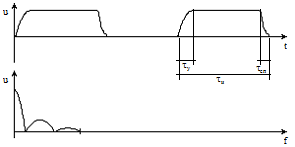
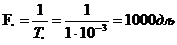
Рис. 3 Временная и спектральная диаграммы видеоимпульсов на выходе детектора РПрУ
Данные к расчёту:
Дальность: R=150 км;
Разрешение по дальности:DR=150 м;
Суммарная ошибка: s=10 м;
ЭПР цели: sц=2 м2;
Скорость цели: Vц=400 м/с;
Длина волны:l=0,23 м.
Расчёт параметров сигнала:
Выбор частоты следования и длительности импульсовпроизводится из условия однозначного измерения параметров целей на максимальной дальности:
Период повторения импульса:

Частота следования импульсов:
Длительностьимпульса:
В схеме сопровождения по дальности рассматриваемой РЛС определяется временной сдвиг очередного эхо-сигнала сопровождаемой цели по отношению к следящим импульсам, временное положение которых соответствует оценке задержки сигнала цели. Поэтому время установления переднего фронта видеоимпульса (рис.2.2.3) должно лежать в пределах:
 .
.
По этому параметру определяется полоса пропускания линейной части РПрУ, что будет сделано в дальнейшем. Примем τу=0,2 мкс.
В РЛС сопровождения, измеряющих дальность и два угла, используют игольчатый луч. Ширина луча антенны одинакова во всех плоскостях и определяется разрешением по углу q0,5=Da=Db.
Т.к. измеритель угловых координат выходит за рамки данного проекта, и в техническом задании отсутствуют значения Da и Db, то q0,5 принимаем равным 1,5о.
Основной характеристикой качества работы радиолокационной станции, исходя из её целевого назначения, является точностьслежения. Показателями точности являются ошибки работы системы. Различают динамическую и флюктуационную ошибку. Динамической ошибкой sд является ошибка по задающемувоздействию, афлюктуационная sф в данном случае связанас собственным шумом приемника.
Оптимизация системы по точности заключается в выборе оптимального коэффициента усиления разомкнутой системы КУопт, при котором имеем минимум среднеквадратической ошибки
 .
.
Как видно из графика (рис.2.2.4) зависимости sд и sф от КУ, в оптимальном режиме sф=sд, откуда

Рис. 4
Отношение сигнал/шум связано с флюктуационной ошибкой соотношением:
 ,где полоса
,где полоса
DFэ =(5..10)/2p»2

Необходимо учитывать потери в отношениисигнал/шум, возникающие из-за следующих причин:
· потери при распространении радиоволн ρ1 = 1...3 дБ
· потери в антенно-фидерном тракте ρ2 = 1 дБ
· потери при амплитудном детектировании ρ 3 = 1...5 дБ
· потери на квантование ρ 4 = 2 дБ (придвухуровневом квантовании)
Суммарный коэффициент потерь: ρ = Sρi = 5...10 дБ.
Примем ρ= 10 [дБ] = 3,16 [раз]
Отношение сигнал/шум с учетом потерь:
(Рс/Рш)`= (Рс/Рш)×ρ= 0,45×3,16» 1,42
Определение параметров антенны:
Коэффициент направленного действия (КНД):

Примем коэффициент полезного действия (КПД) антенны равным: h=0,95.
Коэффициент усиления:

Расчет требуемой мощности передатчика РЛС производим на основе уравнения дальности радиолокации, без учета влияния Земли (высота объектов достаточна):

где sц - эффективная площадь рассеяния цели
h - КПД антенны (h» 0,95)
k = 1,38x10-23 Дж/К - постоянная Больцмана
Т0 = 290 К - температура воздуха по Кельвину
Ш = 3,5-коэффициент шума приемника
b0 =0,002...0,004 дБ/км - величина затухания волн в атмосфере.
Примем b0 = 0,002 дБ/км.
R = Rmax× e-0,115b0Rmax = 150 × e-0,115x0,002x150»145 км
δR = Rmax -R = 150-145 =5км
Полоса приемника:
Fпр = 1/tи = 1 / 1×10-6 = 1 МГц
Полоса шума приемника:
Fш= 1,1Fп =1,1×106= 1,1 Мгц
Импульсная мощность передатчика:

Ри<1 МВт, следовательно можно использовать простой сигнал.
Распределение искажений
При рассмотрении такой характеристики РПрУ, как допустимый уровень частотных и временных искажений сигнала, остановимся на наиболее существенном для приемников импульсных сигналов показателе - искажениях переднего фронта импульса. Распределение искажений этого вида по каскадам РПрУ можно выразить в величине времени установления переднего фронта импульса и записать следующим образом:

Искажения, вносимые входной цепью незначительны и составляют:
 0,0064 мкс
0,0064 мкс
УРЧ является инерционным звеном, поэтому искажения, вносимые им, довольно велики:

Искажения, вносимые преобразователем частоты, составляют:

Наибольшие искажения переднего фронта радиоимпульсов вносятся детектором из-за шунтирования выходного контура УПЧ входным сопротивлением детектора:

Оставшееся искажение переднего фронта импульса вносится сравнительно узкополосным УПЧ. Определим допустимые искажения, приходящиеся на один каскад УПЧ:








