Введение
- Обоснование и анализ задач главных специализированных задач, поставленных перед заданной радиотехнической системой.
- Анализ возможных решений и принципов работы,используемых для данного вида система с учетом поставленных задач.
Основная часть
- Выбор и обоснование принципа построения РЛС заданного типа на основе исходных данных с акцентом на следующее:
а) Обоснование структуры используемых радиосигналов.
б) Анализ выбранных функциональной и структурной схем.
- Необходимые числовые вычисления параметров РЛС.
- Конкретная схемная реализация полученного решения.
Заключение
- Анализ основных радиотехнических достоинств и недостатков, характерных для разработанной РЛС заданного типа.
- Конструктивные предложения с обоснованием конкретных решений по устранению этих недостатков.
1. Введение
РЛС - следящего типа предназначены для обнаружения (измерения) координат (параметров) состояния или (и) пространстве и значения, направления вектора скорости движения в системах слежения за объектами.
В рамках данного проекта рассматривается приемное устройство одноцелевой РЛС сопровождения, осуществляющей непрерывное слежение за перемещением цели. Такая РЛС представляет собой наземную систему, у которой антенна с иглообразным лучом смонтирована на поворотном устройстве со следящим приводом, которое, изменяя положение антенны по азимуту и углу места, позволяет следить за целью. Путем измерения угла прихода фронта волны эхо-сигнала и корректирования положения антенны таким образом, чтобы цель удерживалась в центре луча, определяется ошибка ориентирования антенны.
Различают РЛС импульсного и непрерывного излучения. В РЛС с непрерывным излучением используются немодулированные и ЧМ колебания. Однако наибольшее применение нашли импульсные приемопередающие радиолокационные станции, излучающие в направлении цели короткие зондирующие СВЧ-радиоимпульсы с фиксированнымпериодомследования,длительностью импульсов, амплитудой и несущей частотой (рис.1.1,а), что обеспечивает высокую разрешающую способность и точность приизмерениидальности. Радиоприемные устройства (РПрУ) таких станций служат для приема части энергии излучаемых радиоимпульсов,отраженной от цели. Отраженные импульсы поступают на вход приемника с временным сдвигом DtD = 2R/c, где R – расстояние до объекта. Измеряя DtD, можно судить о расстоянии до цели, а узкая диаграмма направленности антенны позволяет определить направление на объект. 2.
Системная аналитика
Чувствительность методов сканирования и переключения луча к флуктуациям амплитуды эхо-сигналов явилась основной причиной разработки РЛС сопровождения, обеспечивающей одновременное наличие всех лучей, необходимых для выявления угловой ошибки. Выходные сигналы всех лучей, соответствующие одному зондирующему импульсу, могут быть одновременно сравнены, благодаря чему исключается влияние изменения амплитуды эхо-сигнала во времени. Такой метод называется моноимпульсным (полная информация об угловых ошибках извлекается из одного импульса).
Моноимпульсной аппаратуре присуща высокая точность угловых измерений, т.к. система облучателей жестко смонтирована и не имеет движущихся деталей.
Эхо сигнал фокусируется в виде “пятна”, поперечное сечение которого в случае антенны с круговой апертурой имеет вид J1(x)/x (J1(x) функция Бесселя 1 го порядка). Пятно находится в фокальной плоскости, если цель расположена на оси антенны, и смещается относительно центра, когда цель отходит от оси. Облучатель антенны расположен в фокальной точке, так что принимаемая энергия максимальна в том случае, когда цель находится на оси.
Облучатель сконструирован таким образом, что он реагирует на любое боковое смещение пятна относительно фокальной плоскости. При использовании облучателя в виде квадрата, образованного четырьмя рупорами, полная симметрия обеспечивается когда пятно находится точно в центре (на каждый из четырех рупоров попадает одинаковое количество энергии. При отклонении цели от оси антенны и, следовательно, смещении пятна относительно центра, равенство энергий, принимаемых рупорами нарушается. РЛС регистрирует отклонение цели от оси антенны, сравнивая амплитуды эхо-сигналов, появляющихся в каждом из рупоров. Это осуществляется с помощью СВЧ мостовых соединений, формирующих разности сигналов каждой пары двойных рупоров. Для выявления ошибки по азимуту, производится вычитание выходного сигнала левой пары рупоров из выходного сигнала правой пары. Сигнал верхней пары вычитается из выходного сигнала нижней пары.
В схеме сопровождения по дальности определяется время прихода очередного эхо-сигнала от сопровождаемой цели и вырабатываются стробирующие импульсы, отпирающие соответствующие цепи приемника только на те короткие интервалы времени, когда ожидается эхо-сигнал выбранной цели. Для получения устойчивого автоматического сопровождения по углам необходимо поддерживать с помощью АРУ постоянство усиления следящей системы схемы сопровождения.
Суммарный сигнал ПЧ используется также, как опорный сигнал в ФД, вырабатывающих из разностных сигналов напряжения сигналов ошибки сопровождения по углам. ФД выполняет скалярное умножение; выходное напряжение ФД:
e = êSêêDêcos(q),
гдеêSê- модуль суммарного сигнала;
êDê - модуль разностного сигнала;
q - фазовый угол между ними.
В правильно отрегулированной РЛСq принимает только два значения: 0 или 1800, так что единственным назначением фазочувствительной характеристики детектора ошибки является обеспечение положительной или отрицательной полярности сигнала при 0 и 1800 соответственно, что придает выходному сигналу детектора угловой ошибки признак направления отклонения от оси антенны.
В импульсной РЛС сопровождения выходным сигналом детектора угловой ошибки является биполярный видеосигнал, амплитуда которого пропорциональна угловой ошибке, а полярность соответствует знаку ошибки.
Рис. 5 Структурная схема моноимпульсной РЛС сопровождения
Рис.5. Рефлектор и облучатели антенной системы радиолокатора
Аналогично, так как по одну сторону вертикальной плоскости расположены облучатели 1 и 3, а по другую – 2 и 4, разностный сигнал азимута равен 
В режиме приёма с кольца 1 снимаются напряжения: U1+U2 и U1- U2. C кольца 2: U3 + U4 и U3 – U4. С кольца 3: U1+U2+U3+U4 (к суммарному каналу) и (U1+U2)-(U3+U4) - к каналу угла места. С кольца 4: (U1+U3) – (U2+U4) – к каналу азимута. Кроме того, разностный отвод кольца 4 соединяется с поглощающей нагрузкой R.
В каждом приёмном канале имеются смеситель с общим гетеродином и УПЧ. Вход схемы БАРУ соединяется с выходом УПЧ суммарного канала, а выход БАРУ подключён к цепям смещения УПЧ всех трёх каналов. Амплитудный детектор (видеодетектор) и видеоусилитель включены в суммарный канал для получения видеосигналов, по которым производится обнаружение и дальнометрия целей. С фазовых детекторов, к которым подводятся разностные сигналы от УПЧ каналов азимута и угла места и опорные сигналы – с выхода УПЧ суммарного канала, снимаются управляющие сигналы для исполнительного устройства.
Распределение искажений
При рассмотрении такой характеристики РПрУ, как допустимый уровень частотных и временных искажений сигнала, остановимся на наиболее существенном для приемников импульсных сигналов показателе - искажениях переднего фронта импульса. Распределение искажений этого вида по каскадам РПрУ можно выразить в величине времени установления переднего фронта импульса и записать следующим образом:

Искажения, вносимые входной цепью незначительны и составляют:
 0,0064 мкс
0,0064 мкс
УРЧ является инерционным звеном, поэтому искажения, вносимые им, довольно велики:

Искажения, вносимые преобразователем частоты, составляют:

Наибольшие искажения переднего фронта радиоимпульсов вносятся детектором из-за шунтирования выходного контура УПЧ входным сопротивлением детектора:

Оставшееся искажение переднего фронта импульса вносится сравнительно узкополосным УПЧ. Определим допустимые искажения, приходящиеся на один каскад УПЧ:

Выбор гетеродина
Исходные данные для выбора гетеродина:
· Рабочая частота fг=fc-fпр=1,3-0,03=1,27 ГГц;
· Требуемая выходная мощность РГвых;
· Диапазон перестройки по частоте;
· Шумовые характеристики.
Целесообразно использовать полупроводниковый гетеродин на диоде Ганна (ГДГ). Выходная мощность гетеродина должна быть достаточна для нормальной работы смесителей и схем ЧАПЧ всех трех каналов приема РЛС:
РГвых = (Рс + Рапч)×3 = (6+9)×3 =45 мВт;
Из таблицы 8.4 [3] выбираем ГДГ типа VSC-9019, имеющий следующие параметры:
· диапазон рабочих частот fГ,ГГц.......................................1..2;
· шаг перестройки: электронной Dfэл,МГц...........................50;
механической Dfмех,МГц....................200;
· выходная мощность РГвых, мВт........................................100;
· напряжение питания Uпит,В.................................................11;
· ток потребления I,А............................................................0,5;
Расчет селективности
Селективность по зеркальному каналу обеспечивается с помощью частотно - избирательной входной цепи, а по соседнему каналу - используя два одиночных контура: на выходе преобразователя частоты и на выходе УПЧ.
Селективность по зеркальному каналу:
Принимаем dэс=0,006
 = 23,8 дБ,
= 23,8 дБ,
Эквивалентное затухание одиночных контуров:
 dэп= П/(2×fпр)=6,3/(2×30)=0,15
dэп= П/(2×fпр)=6,3/(2×30)=0,15
Селективность по соседнему каналу:
Полагаем:Dfск= П=6,3 МГц;n=2,
тогда:
 = 18,9 дБ
= 18,9 дБ
Детектор
Для детектирования радиоимпульсов,т.е. для преобразования их в видеоимпульсы, используемпоследовательные диодные детекторы, выполненные по схеме (рис.5.7.1).
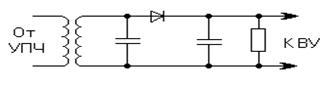
Рис.9Последовательный диодный детектор
Технико-экономические показатели блока ПЧпроектируемого РПрУ
| №
| технико-экономические показатели
| обозначение
| Ед. изм.
| аналог
| разработка
|
|
| Коэффициент усиления по напряжению
| Кu
| -
| 7·103
| 6·103
|
|
| Динамический диапазон:
|
|
|
|
|
|
| · на входе
· на выходе
| Dвх
Dвых
| дБ
|
|
|
|
| Коэффициент шума
| Ш
| -
|
|
|
|
| Коэффициент готовности
| Кг
| -
| 0,9965
| 0,99886
|
|
| Масса
| m
| г
|
|
|
|
| Габариты
| Г
| мм
| 80Х140
| 60Х100
|
Радиолокаторов в ГА РФ
В настоящее время можно выделить два основных направления совершенствования радиолокаторов с активным ответом. Первое – модернизация существующих ВРЛ, улучшение их тактико-технических и эксплуатационных характеристик. Второе направление – создание принципиально новой системы ВРЛ, а именно ВРЛ с дискретно-адресным запросом и реализацией в дальнейшем S – адресного режима работы системы ВРЛ.
Вторичный радиолокатор ближайшего будущего с традиционным форматом сигнала – это высоконадёжная комплексная система, имеющая антенну с вертикальным раскрывом, одноканальный передатчик, построенный на твёрдотельных элементах, приёмный тракт, выполненный на гибридных интегральных микросхемах, микрополосковых линиях с использованием методов термовакуумного напыления элементов, это мощная многофункциональная аппаратура обработки и декодирования ответных сигналов. В основе его работы лежит моноимпульсный метод радиолокации. Его средний ресурс должен быть порядка 100 000 ч., при наработке на отказ  (Для ВРЛ «Корень-АС» значения этих показателей соответственно равны 40000 ч. и 1500 ч.).
(Для ВРЛ «Корень-АС» значения этих показателей соответственно равны 40000 ч. и 1500 ч.).
Задачи, решаемые ДАС ВРЛ, привели к использованию новых для ВРЛ форм сигналов и методов модуляции – запрос и передача информации в канале «Земля – борт» осуществляется с помощью кодово-импульсной относительной фазовой модуляции (КИМ ОФМ); в канале «борт – Земля» модуляция кодово-импульсная (КИМ).
К характеристикам ВРЛ, работающим в режиме S, предъявляются более жёсткие требования. В частности, для обеспечения высоких точностных характеристик радиолокационного определения координат ВС и оптимального использования времени канала, антенно-фидерный тракт, приёмное устройство и аппаратура обработки должны обеспечивать моноимпульсное измерение координат ВС. Использование моноимпульсного приёма позволяет, в свою очередь, снизить скорость опроса, что в сочетании с улучшенной обработкой ответных сигналов в режиме RBS/УВД существенно уменьшает их искажение. Кроме того, допуск на нестабильность частоты должен составлять  для возможности реализации дифференциально-фазовой модуляции. Однако все эти требования одновременно позволяют улучшить характеристики ВРЛ и обычного формата.
для возможности реализации дифференциально-фазовой модуляции. Однако все эти требования одновременно позволяют улучшить характеристики ВРЛ и обычного формата.
Моноимпульсная наземная станция и наземная станция режима S имеют значительно более высокие точностные характеристики по сравнению с существующими вторичными РЛС, и поэтому могут обеспечить меньшие минимумы эшелонирования на большом расстоянии. Так, если значения СКО лучших современных зарубежных обычных ВРЛ по дальности  , по азимуту
, по азимуту  = 0,150, то для моноимпульсных вторичных радиолокаторов (МВРЛ)
= 0,150, то для моноимпульсных вторичных радиолокаторов (МВРЛ)  и
и 
Заключение
Таким образом, существующие методы пеленгации, измерения угловых координат, дальности, скорости цели позволяют использовать преимущества существующих радиотехнических координаторов для решения поставленных задач. Наиболее практичным считается использование для построения радиотехнических систем поиска и сопровождения целей нескольких, объединенных единой функциональной задачей, наиболее удачно реализованных схем радиотехнических координаторов. Наиболее полно данная проблема решена в многофункциональных РЛС.
У данной системы РЛС можно выделить преимущества:
1) Так как угловая информация выделяется в виде отношений сигналов, то точность измерения не зависит от амплитуды флюктуаций отраженных сигналов.
2) Выделение отношений принимаемых сигналов происходит в течении действия каждого импульса, то сесть информация о трех координатах извлекается при получении одного импульса от цели, а не засчет накопления информации от пачки импульсов.
3) Моноимпульсные координаторы защищены от угловых ответных помех, а также от непрерывных шумовых помех (за счет изменения амплитуды сигнала от импульса к импульсу).
4) В моноимпульсных системах отсутствуют методические ошибки по сравнению с координаторами линейного и конического сканирования. Кроме этого отношение принимаемых сигналов не зависит то скорости распространения радиоволн.
5) Дальность действия моноимпульсных координаторов превышает аналогичные по параметрам координаторы с линейным и коническим сканированием, за счет того, что линия излучения электромагнитной энергии совпадает с РСН антенн при приеме сигналов.
Недостатки:
1) Трудность создания симметрии при формировании суммарной и суммарно-разностных ДН.
2) Сложность обеспечения идентичности приема амплитудных и фазовых характеристик приемных систем.
Списоклитературы
1. Радиоприёмные устройства: Учебник для вузов под редакциейН.Н.Фомина - М.: Радио и связь, 1996.
2. Проектирование СВЧ устройств радиолокационных приёмников - М.:Советскоерадио, 1973.
3. Разработкаструктурнойсхемырадиоприёмногоустройства: Учебное пособие по курсовому проектированию. СидоровВ. М.-М.: типографияВЗЭИС, 1988.
4. Проектирование радиоприёмных устройств: Учебное пособиедля вузов подредакциейА.П. Сиверса - М.: Советскоерадио, 1976.
5. Радиоприемные устройства: О.В.Головин - М.: Высшая Школа, 1997
6. Новые транзисторы: Справочник, часть 1. -М.: Солон, Микротех,1996.
7. Аналоговыеинтегральныемикросхемыдлябытовой аппаратуры: Справочник, В.И. Атаев, В.А. Болотников.- М.: ИздательствоМЭИ, 1992.
8. Конструирование и расчёт полосковых устройств: Учебное пособие для вузов под редакцией И.С. Ковалёва - М.: Советскоерадио, 1974.
Резисторы: Справочник, В.В. Дубровский и др.;Подред. Четверткова и В.М. Терехова. – 2-е изд., перераб. и дополн.- М.: Радио и связь, 1991.
9. Усилители с широким динамическим диапазоном на микросхемах: А.П.Лукошкин и др. - М.: Радио и связь, 1981
10.Радиоприёмные устройства: Учебник для вузов под редакциейН.Н.Фомина - М.: Радио и связь, 1996.
11.Расчет технико–экономических показателей радиотехнических устройств – методические указания к курсовому и дипломному проектированию – М.: ВЗЭИС, 1982.
12.Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. – М.: Сов. Радио, 1975.
13.Международная организация гражданской авиации.Проект конструктивного материала для приложения 10, касающегося характеристик системы вторичного обзорного радиолокатора (ВОРЛ) для включения в дополнение в части 1 тома 1 приложения 10.
Рабочий документ SicasP/4 – WP/3 11/12/88.
Введение
- Обоснование и анализ задач главных специализированных задач, поставленных перед заданной радиотехнической системой.
- Анализ возможных решений и принципов работы,используемых для данного вида система с учетом поставленных задач.
Основная часть
- Выбор и обоснование принципа построения РЛС заданного типа на основе исходных данных с акцентом на следующее:
а) Обоснование структуры используемых радиосигналов.
б) Анализ выбранных функциональной и структурной схем.
- Необходимые числовые вычисления параметров РЛС.
- Конкретная схемная реализация полученного решения.
Заключение
- Анализ основных радиотехнических достоинств и недостатков, характерных для разработанной РЛС заданного типа.
- Конструктивные предложения с обоснованием конкретных решений по устранению этих недостатков.
1. Введение
РЛС - следящего типа предназначены для обнаружения (измерения) координат (параметров) состояния или (и) пространстве и значения, направления вектора скорости движения в системах слежения за объектами.
В рамках данного проекта рассматривается приемное устройство одноцелевой РЛС сопровождения, осуществляющей непрерывное слежение за перемещением цели. Такая РЛС представляет собой наземную систему, у которой антенна с иглообразным лучом смонтирована на поворотном устройстве со следящим приводом, которое, изменяя положение антенны по азимуту и углу места, позволяет следить за целью. Путем измерения угла прихода фронта волны эхо-сигнала и корректирования положения антенны таким образом, чтобы цель удерживалась в центре луча, определяется ошибка ориентирования антенны.
Различают РЛС импульсного и непрерывного излучения. В РЛС с непрерывным излучением используются немодулированные и ЧМ колебания. Однако наибольшее применение нашли импульсные приемопередающие радиолокационные станции, излучающие в направлении цели короткие зондирующие СВЧ-радиоимпульсы с фиксированнымпериодомследования,длительностью импульсов, амплитудой и несущей частотой (рис.1.1,а), что обеспечивает высокую разрешающую способность и точность приизмерениидальности. Радиоприемные устройства (РПрУ) таких станций служат для приема части энергии излучаемых радиоимпульсов,отраженной от цели. Отраженные импульсы поступают на вход приемника с временным сдвигом DtD = 2R/c, где R – расстояние до объекта. Измеряя DtD, можно судить о расстоянии до цели, а узкая диаграмма направленности антенны позволяет определить направление на объект. 2.
Системная аналитика
Чувствительность методов сканирования и переключения луча к флуктуациям амплитуды эхо-сигналов явилась основной причиной разработки РЛС сопровождения, обеспечивающей одновременное наличие всех лучей, необходимых для выявления угловой ошибки. Выходные сигналы всех лучей, соответствующие одному зондирующему импульсу, могут быть одновременно сравнены, благодаря чему исключается влияние изменения амплитуды эхо-сигнала во времени. Такой метод называется моноимпульсным (полная информация об угловых ошибках извлекается из одного импульса).
Моноимпульсной аппаратуре присуща высокая точность угловых измерений, т.к. система облучателей жестко смонтирована и не имеет движущихся деталей.
Эхо сигнал фокусируется в виде “пятна”, поперечное сечение которого в случае антенны с круговой апертурой имеет вид J1(x)/x (J1(x) функция Бесселя 1 го порядка). Пятно находится в фокальной плоскости, если цель расположена на оси антенны, и смещается относительно центра, когда цель отходит от оси. Облучатель антенны расположен в фокальной точке, так что принимаемая энергия максимальна в том случае, когда цель находится на оси.
Облучатель сконструирован таким образом, что он реагирует на любое боковое смещение пятна относительно фокальной плоскости. При использовании облучателя в виде квадрата, образованного четырьмя рупорами, полная симметрия обеспечивается когда пятно находится точно в центре (на каждый из четырех рупоров попадает одинаковое количество энергии. При отклонении цели от оси антенны и, следовательно, смещении пятна относительно центра, равенство энергий, принимаемых рупорами нарушается. РЛС регистрирует отклонение цели от оси антенны, сравнивая амплитуды эхо-сигналов, появляющихся в каждом из рупоров. Это осуществляется с помощью СВЧ мостовых соединений, формирующих разности сигналов каждой пары двойных рупоров. Для выявления ошибки по азимуту, производится вычитание выходного сигнала левой пары рупоров из выходного сигнала правой пары. Сигнал верхней пары вычитается из выходного сигнала нижней пары.
В схеме сопровождения по дальности определяется время прихода очередного эхо-сигнала от сопровождаемой цели и вырабатываются стробирующие импульсы, отпирающие соответствующие цепи приемника только на те короткие интервалы времени, когда ожидается эхо-сигнал выбранной цели. Для получения устойчивого автоматического сопровождения по углам необходимо поддерживать с помощью АРУ постоянство усиления следящей системы схемы сопровождения.
Суммарный сигнал ПЧ используется также, как опорный сигнал в ФД, вырабатывающих из разностных сигналов напряжения сигналов ошибки сопровождения по углам. ФД выполняет скалярное умножение; выходное напряжение ФД:
e = êSêêDêcos(q),
гдеêSê- модуль суммарного сигнала;
êDê - модуль разностного сигнала;
q - фазовый угол между ними.
В правильно отрегулированной РЛСq принимает только два значения: 0 или 1800, так что единственным назначением фазочувствительной характеристики детектора ошибки является обеспечение положительной или отрицательной полярности сигнала при 0 и 1800 соответственно, что придает выходному сигналу детектора угловой ошибки признак направления отклонения от оси антенны.
В импульсной РЛС сопровождения выходным сигналом детектора угловой ошибки является биполярный видеосигнал, амплитуда которого пропорциональна угловой ошибке, а полярность соответствует знаку ошибки.
Обоснование методов решения поставленной задачи
1.В РЛС с автоматическим сопровождением по направлению главным образом применяются зеркальные параболические антенны. Линзовые антенны не нашли применения вследствие низкого к.п.д. и больших боковых лепестков ДН. Из параболических наиболее простая антенна следящего угломера с коническим сканированием, наиболее громоздкая – антенна моноимпульсного угломера с фазовой пеленгацией. Антенна моноимпульсной системы с амплитудной пеленгацией значительно меньше по габаритам, но из-за необходимости установки четырёх облучателей, которые к тому же стыкуются с волноводами, имеющими малое поперечное сечение,она имеет сложную конструкцию. Таких волноводных линий должно быть три – по числу каналов, а при коническом сканировании – только одна.
2.Лучи антенны с коническим сканированием пересекаются в РСН на уровне половинной мощности, и это вызывает потери энергии на 3 дБ. Моноимпульсная РЛС свободна от таких потерь на смещение луча, так как максимум её суммарной ДН совпадает с РСН.
3.Моноимпульсная РЛС имеет более высокий темп выдачи данных: они обновляют данные об угловом положении цели с частотой следования импульсов Fс, а РЛС с коническим сканированием – с частотой сканирования Fск, которая должна быть меньше Fс по крайней мере в 4 раза (чтобы получить хотя бы по одному отражённому импульсу в четырёх крайних положениях луча антенны); практически же 
4.Отсутствие движущихся частей и жёсткий монтаж волноводного питания антенны в моноимпульсных РЛС способствует повышению точности определения угловых координат, особенно при построении антенных систем на ФАР.
5. Пеленгатор моноимпульсной РЛС не реагирует на помехи, исходящие из одной точки пространства, так как они полностью компенсируются при вычитании сигналов. Системы с коническим сканированием чувствительны к этим помехам, а если помехи к тому же модулированы с частотой сканирования, то канал АСН становится неработоспособным.
6. Одно из основных преимуществ моноимпульсных РЛС – значительно меньшая восприимчивость к амплитудным флуктуациям отражённых сигналов. Влияние флуктуаций на точность сопровождения можно было бы полностью устранить, если бы удалось создать идеальную нормировку, но для этого АРУ должно быть не только быстродействующей, но и безынерционной, что физически невозможно.
7. В многоканальных системах пеленгации практически исключено применение вращающихся волноводных сочленений, так как при поворотах создаётся паразитная амплитудная и фазовая модуляция, а также дополнительные шумы, что значительно снижает точность. Поэтому весь волноводно-смесительный тракт моноимпульсных РЛС вместе с предварительными усилителями обычно выполняют как одно целое с зеркалом антенны.
Перечисленные недостатки почти полностью устраняются в двухзеркальных антеннах, состоящих из параболического рефлектора и плоского контррефлектора (рис.9). Излучатели облучают контррефлектор сквозь отверстие в центре рефлектора. Благодаря такому расположению их суммарно-разностные волноводные мосты и смесительные секции можно разместить непосредственно за рефлектором и свести длину волноводов к минимуму. Благодаря контррефлектору облучатели как бы искусственно выносятся в район фокуса рефлектора (пунктир). Размеры длиннофокусной антенны такого вида значительно сокращаются по сравнению с длиннофокусными однозеркальными антеннами, у которых облучатели действительно размещены в фокусе рефлектора.
Качание ДН и равносигнального направления достигается за счёт поворота одного только контррефлектора, что значительно снижает требуемую мощность антенного привода, уменьшает вес, габариты и инерционность антенной системы.
Недостатком двухзеркальных антенн является ограничение угла обзора (не более 600) допустимыми искажениями ДН.
ПАРАБОЛИЧЕСКИЙ РЕФЛЕКТОР 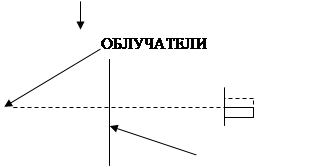
Рис.9. Двухзеркальная антенна МРЛС с плоским контррефлектором

| Фокус рефлектора (положение
эквивалентного точечного
источника)
| |


















Затемнение рефлектора контррефлектором устраняется с помощью системы поворота плоскости поляризации [3].
| | | | |
| | | | Гиперболический контррефлектор
| |
| |  |
| |
Рис. 10. Двухзеркальная антенна Кассегрена
Контррефлектор сделан не сплошным, а в виде вертикальных металлических полосок, размещённых достаточно плотно и запрессованных в пластину из диэлектрика прозрачного для радиоволн. Излучаемая облучателями вертикально поляризованная волна отражается от контррефлектора как от сплошного металлического экрана. Падая на рефлектор, эта волна преобразуется в горизонтально поляризованную отражённую волну, которая затем свободно проходит в открытое пространство через решётку контррефлектора из вертикальных полосок.
Работа РЛС в реальных условиях сопровождается действием разного рода активных и пассивных нестационарных помех естественного и искусственного происхождения, уровень мощности которых зачастую значительно (на 20..60 дБ) превышает уровень полезного сигнала, а параметры априорно неизвестны. Воздействие помех еще больше расширяет диапазон изменения сигналов, поступающих в антенну РЛС.
Пределы изменения амплитуд напряжения сигнала от UСмин до UСмакс характеризуются динамическим диапазоном сигналов
DС = UСмин/UСмакс,
который может быть выражен в децибеллах:
DС [дБ] = 20lg(UСмин/UСмакс).
Для радиолокационных сигналов DС ~(50...120) дБ [9], однако для РЛС конкретного назначения обычно принимают DС ~ (50..90) дБ, т.к. известны типы целей и пределы изменения дальности.
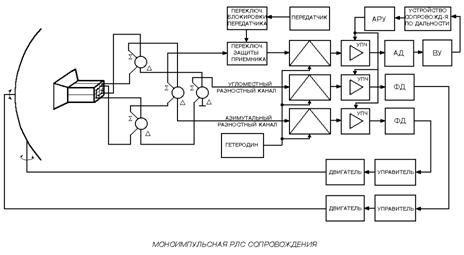
Рис. 5 Структурная схема моноимпульсной РЛС сопровождения








