Уравнение механической характеристики АД можно получить из рассмотрения баланса мощности в электродвигателе.
Мощность, потребляемая из сети,
Р 1=D Р 0+D Р М1+ Р ЭМ=3(I m2 R m+ I 2'2 R 1+ I 2'2 R 2S' / S), (2.30)
где D Р М1 - потери в меди обмоток статора.
Отсюда электромагнитная мощность равна:
 , (2.31)
, (2.31)
где Х К= Х 1+ Х 2’ - индуктивное фазное сопротивление короткого замыкания,
R '2S= R '2+ R '2ДОБ, R '2ДОБ= R '2ДОБ + Кr. (2.32)
Или Р ЭМ= М ЭМ•w0, электромагнитный момент
 . (2.33)
. (2.33)
Анализ уравнения механической характеристики (2.33) показывает, что график зависимости М (S) имеет два максимума - один в генераторном режиме (скольжение отрицательно) и другой - в двигательном (скольжение положительно). Максимальное значение момента М К, развиваемого двигателем, называют критическим, а соответствующее ему скольжение S К - критическим.
Критическое скольжение определяется по следующему выражению
 , (2.34)
, (2.34)
Максимальный момент, соответствующий критическому скольжению
 (2.35)
(2.35)
В приведённых выражениях знак плюс соответствует двигательному режиму работы, а знак минус – генераторному. Из полученного выражения, определяющего максимальный момент видно, что максимальный момент в генераторном режиме больше, чем в двигательном.
Если выражение, определяющее электромагнитный момент разделить на выражение максимального момента ( ) и пренебречь активным сопротивлением обмотки статора
) и пренебречь активным сопротивлением обмотки статора  , то после ряда преобразований получим упрощённое выражение электромагнитного момента, удобное для построения механической характеристики (рис. 2.19,а) асинхронного электродвигателя:
, то после ряда преобразований получим упрощённое выражение электромагнитного момента, удобное для построения механической характеристики (рис. 2.19,а) асинхронного электродвигателя:
 (2.35)
(2.35)
Критическое скольжение асинхронного электродвигателя можно определить по паспортным данным на электродвигатель:
 (2.36)
(2.36)
где sном – скольжение при номинальной нагрузке;  - перегрузочная способность электродвигателя. Зависимость M(s) приведена на рис. 2.19.
- перегрузочная способность электродвигателя. Зависимость M(s) приведена на рис. 2.19.
Рис. 2.19. Механические характеристики асинхронного электродвигателя
Из анализа полученных уравнений видно, что регулирование скорости вращения АД можно осуществить изменением частоты и напряжения (рис. 2.19,г), подводимого к статору, величин сопротивлений, вводимых в цепь ротора (рис. 2.19,б) или статора (рис. 2.19,в) АД, а также изменением числа пар полюсов.
Для регулируемого электропривода важными являются не только регулировочные свойства, характеризуемые двигательным режимом, но и его свойства в тормозных режимах. В асинхронном приводе различают режимы динамического торможения, противовключения и рекуперативного (генераторное торможение с отдачей энергии в сеть) торможения.
Динамическое торможение
Для осуществления динамического торможения обмотка статора отключается от сети переменного тока и подключается к источнику постоянного тока (рис. 2.20). Постоянный ток, протекающий в обмотке статора, создает неподвижный в пространстве магнитный поток. Величина постоянного тока, подводимого к статору асинхронного электродвигателя, обычно ограничивается сопротивлением динамического торможения Rд В обмотках вращающегося по инерции ротора наводится ЭДС, которая вызывает появление
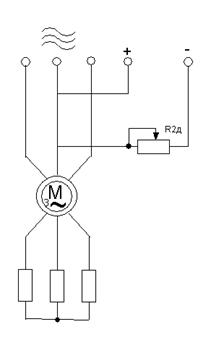
Рис. 2.20. Схема динамического торможения АД
тока в роторной цепи. Взаимодействие тока ротора с неподвижным магнитным потоком статора создает тормозной момент, значение которого определяется выражением
 , (2.37)
, (2.37)
где I ЭКВ - эквивалентный ток обмотки статора, равный для заданной схемы включения обмоток  ;
;
I П - постоянный ток, потребляемый обмоткой статора, I П=(2Q3) I m;
 - текущее значение скольжения при динамическом торможении.
- текущее значение скольжения при динамическом торможении.
Из уравнения (2.37) видно, что момент при динамическом торможении зависит от I ЭКВ, протекающего по обмотке статора, и является функцией относительной скорости вращения ротора S ' = w.
Исследуя полученное значение тормозного момента на экстремумы, найдем, что М К ДТ будет иметь место при
 , (2.38)
, (2.38)
а значение критического момента
 . (2.39)
. (2.39)
С учётом полученных выражений для критического скольжения и критического момента можно вывести уравнение механической характеристики для режима динамического торможения, т. е.
 . (2.40)
. (2.40)
На рис. 2.21 изображены механические характеристики при динамическом торможении для трех различных добавочных сопротивлений в роторе и для двух значений постоянного тока в цепи статора.
Из анализа кривых (рис. 2.21) видно, что при изменении добавочного сопротивления
| Рис. 2.21. Механические характеристики АД при динамическом торможении
| |
в цепи ротора изменяется и среднее значение тормозного момента. Следовательно, имеется оптимальное значение сопротивления, при котором имеет место максимальный тормозной момент при заданном значении постоянного тока и минимальное время торможения.
Режим противовключения
Режим противовключения может быть получен при активном моменте нагрузки (например, при спуске, какого – либо груза), т. е. при М С> М П (рис. 2.22). Для получения соответствующего момента, а, следовательно, и установившейся скорости - wС необходимо в роторную цепь включить добавочное сопротивление R Р2. Установившемуся режиму при этом соответствует точка - wУСТ.1, М С1, т.е. когда момент, развиваемый двигателем, равен моменту статического сопротивления, М = М С.
Рис. 2.22. Торможение противовключением при активном моменте
Торможение противовключением может быть получено путем смены чередования фаз обмотки статора, что приводит к изменению направления вращения магнитного поля. Ротор при этом вращается против направления поля, создавая тормозной момент (рис. 2.22). Когда угловая скорость спадет до нуля, двигатель необходимо отключить от сети, иначе он перейдет в двигательный режим работы, вращаясь в противоположном направлении.
Для ограничения тока, а также для получения эффективного торможения в цепь ротора АД вводят добавочное сопротивление.
Уравнение механической характеристики:
 . (2.41)
. (2.41)
Данный тормозной режим наиболее эффективен, так как при нулевом значении скорости имеет место тормозной момент (рис.2.23).
Рис. 2.23. Торможение АД противовключением.
Рекуперативное торможение
Данный вид торможения имеет место только при скорости выше синхронной, w>w0, и соответствует генераторному торможению с отдачей энергии в сеть. Механические характеристики w= f(M) для данного режима работы приведены на рис. 2.24.
Рис. 2.24. Торможение АД с отдачей энергии в сеть.
Уравнение механической характеристики:
 , (2.42)
, (2.42)
где  ;
;  .
.
Из рисунка 2.24 видно, что механические характеристики в режиме рекуперативного торможения являются продолжением характеристик двигательного режима.