СУ подразделяются по способу получения текущей информации о состоянии процесса управления. Поэтому рассматриваемая классификация подразделяет СУ как раз в соответствии с принципами управления.
Классификация систем управления по типу сигналов
Используемые в теории управления модели СУ как правило абстрагированы от физической природы сигналов. Сигналы (координаты,переменные) на входах и выходах функциональных звеньев рассматриваются как носители информации, в сами звенья – как преобразователи этих сигналов. Преобразование сигнала некоторым звеном производится в соответствии с приданным (приписанным) этому звену оператором.
Непрерывные системы. В них информация кодируется уровнем (значением) функции непрерывного времени - см. рис. 1, а.
Рис. 1
 Цифровые системы. В них все переменные или их часть представляют собой дискретные сигналы. Квантование, или дискретизация сигналов может производиться как по уровню, так и по времени. Системы, в которых производится квантование сигнала по времени, а мгновенное значение непрерывного сигнала на выходе какого-либо аналогового звена (звеньев) в моменты квантования кодируется каким-либо параметром импульса (амплитудой, шириной, фазой), называются импульсными системами. На рис. 1, б приведен пример квантования непрерывного сигнала с одинаковыми периодом следования T и длительностью импульсов, амплитуда которых несет информацию о значениях непрерывного сигнала (так называемая амплитудно-импульсная модуляция).
Цифровые системы. В них все переменные или их часть представляют собой дискретные сигналы. Квантование, или дискретизация сигналов может производиться как по уровню, так и по времени. Системы, в которых производится квантование сигнала по времени, а мгновенное значение непрерывного сигнала на выходе какого-либо аналогового звена (звеньев) в моменты квантования кодируется каким-либо параметром импульса (амплитудой, шириной, фазой), называются импульсными системами. На рис. 1, б приведен пример квантования непрерывного сигнала с одинаковыми периодом следования T и длительностью импульсов, амплитуда которых несет информацию о значениях непрерывного сигнала (так называемая амплитудно-импульсная модуляция).
Системы переменного тока. Информация кодируется амплитудой переменного тока, то есть огибающей несущего сигнала - см. рис. 1, в.
Классификация систем управления по алгоритмам
Управления
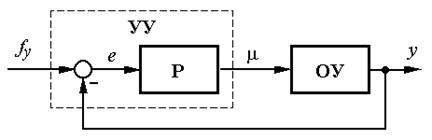
На рис. 2. приведена типовая структура
СУ с единичнойотрицательной обратной связью.
Рис. 2.
Единичная обратная связь означает, что вся информация о выходной координате передается на элемент сравнения, на выходе которого вырабатывается ошибка рассогласования e (t)= fу (t) - y (t). Регулятор P на основе информации об ошибке, то есть по величине рассогласования цели (задающего воздействия fу (t)) и текущего состояния (управляемой координаты y (t)) вырабатывает управляющее воздействие m на ОУ.
Регулятор функционирует в соответствии с заложенным в него алгоритмом, называемым законом управления (законом регулирования).
Рассмотрим некоторые наиболее распространенные – типовые - законы управления для непрерывных СУ. При этом регулятор будем трактовать как устройство, преобразующее сигналы в соответствии с некоторым математическим оператором.
Пропорциональный закон (П-закон). Воздействие на объект прямо-пропорционально рассогласованию:
m (t) = kPe (t). (1)
Интегральный закон (И-закон). Уровень воздействия на объект определяется суммарной ошибкой:
 . (2)
. (2)
Если продифференцировать выражение (2), то получим соотношение d m(t)/ dt = kIe (t), показывающее, что величина ошибки определяет скорость изменения управляющего воздействия. Отличительной особенностью И-  закона управления является то обстоятельство, что установившиеся процессы в СУ могут существовать только при e (t) = 0.
закона управления является то обстоятельство, что установившиеся процессы в СУ могут существовать только при e (t) = 0.
Пропорционально-интегральный закон (ПИ-закон). Представляет собой комбинацию первых двух:
 . (3)
. (3)
Пропорционально-интегрально-дифференциальный закон (ПИД-закон). В дополнение к ПИ-закону формирует управляющее воздействие также и с учетом скорости изменения ошибки:
 . (4)
. (4)
Рассмотренные типовые законы управления (регулирования) часто используются в системах промышленной автоматики.