движения точки.
Теорема. Скорость абсолютного движения точки равна
векторной сумме переносной и относительной скоростей.
Доказательство. Рассмотрим движение точки М.
Положение точки М относительно неподвижной системы
отсчета определяется вектором  , а относительно
, а относительно
подвижной вектором  . Положение точки О относительно
. Положение точки О относительно
неподвижной системы отсчета определяется вектором  .
.
Для любого момента времени выполняется тождество  .
.
Продифференцируем его по времени (вычислим производные
в неподвижной системе отсчета) и получим
 (1) По определению,
(1) По определению,  - абсолютная скорость точки
- абсолютная скорость точки
М,  - абсолютная скорость точки О. Для вычисления
- абсолютная скорость точки О. Для вычисления 
применим формулу Бура. Имеем  . Относительная
. Относительная
производная  - является относительной скоростью точки М
- является относительной скоростью точки М
по отношению к неподвижной системе отсчета, а  -
-
угловая скорость вращения подвижной системы отсчета.
Таким образом из (1) получаем
 (2) Скорость
(2) Скорость 
является скоростью точки свободного твердого тела,
скрепленного с подвижной системой координат, с
которой в данный момент совпадает точка М в движении
тела относительно неподвижной системы отсчета. Это
есть переносная скорость точкиМ. Окончательно получаем

, (3) что и требовалось доказать.
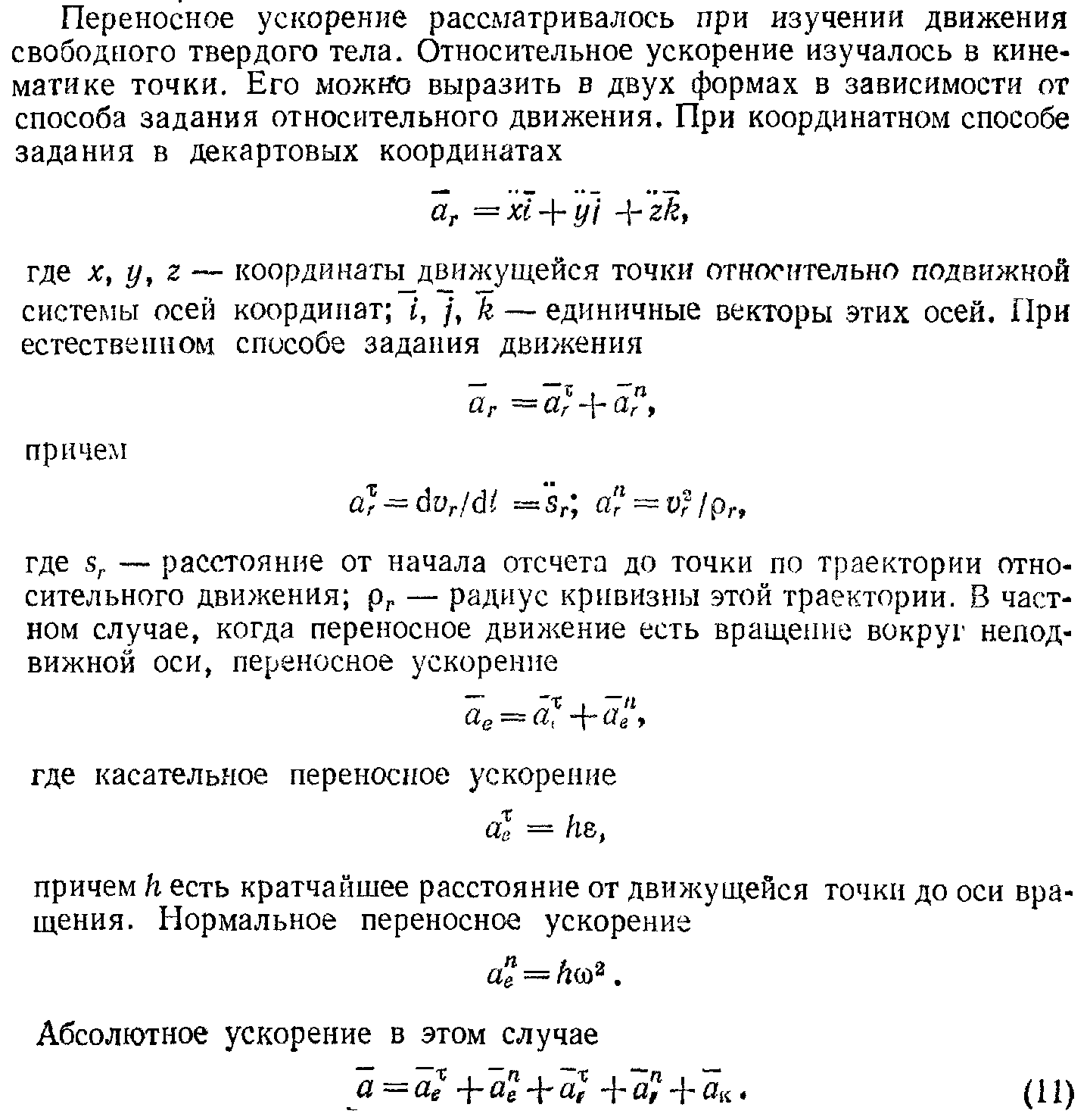
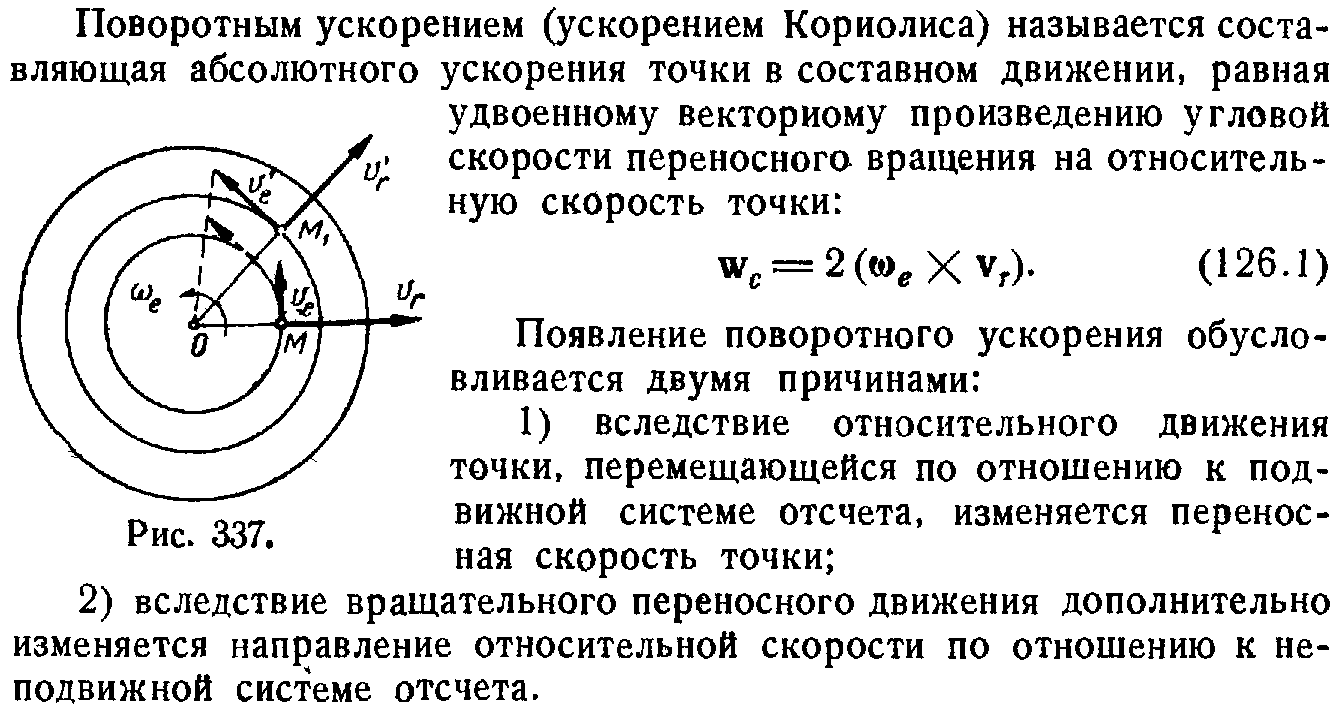
Теорема Кориолиса о сложении Ускорений.

Модуль и направление кориолисова
ускорения. Различные случаи определения
Направления кориолисова ускорения.


Сложение поступательного и
Вращательного движений. Винтовое движение.
Если сложное движение тела слагается из
вращательного вокруг оси Аа с угловой скоростью
 и поступательного со скоростью
и поступательного со скоростью  , направленной
, направленной
параллельно оси Аа (рис.63), то такое движение тела
называется винтовым. Ось Аа называют осью винта.
Когда векторы и направлены в одну сторону,
то при принятом нами правиле изображения  винт
винт
будет правым; если в разные стороны, - левым.
Расстояние, проходимое за время одного оборота
любой точкой тела, лежащей на оси винта, называется
шагом h винта. Если величины и постоянны, то
шаг винта также будет постоянным. Обозначая время
одного оборота через Т, получаем в этом случае  и
и
 , откуда
, откуда  .
.
 Рис.63
Рис.63
При постоянном шаге любая точка М тела, не
лежащая на оси винта, описывает винтовую линию.
Скорость точки М, находящейся от оси винта на
расстоянии  , слагается из поступательной скорости
, слагается из поступательной скорости
и перпендикулярной ей скорости, получаемой во
вращательном движении, которая численно равна  .
.
Следовательно,  .Направлена скорость
.Направлена скорость  по
по
касательной к винтовой линии. Если цилиндрическую
поверхность, по которой движется точка М, разрезать
вдоль образующей и развернуть, то винтовые линии,
обратятся в прямые, наклоненные к основанию цилиндра
под углом  .
.
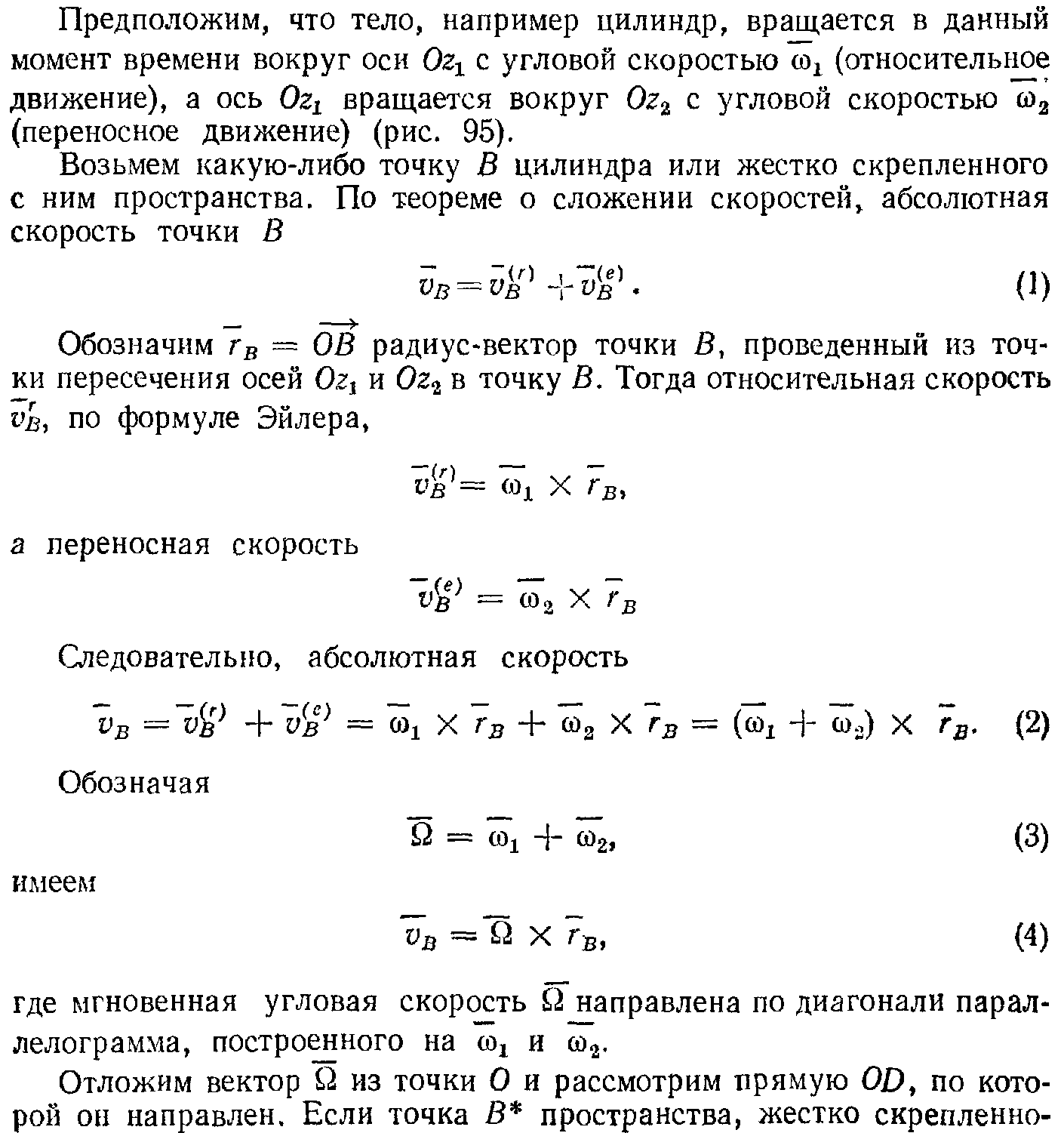
Сложение вращательных движений т.т. вокруг
Пересекающихся осей. Модуль и направление угловой
Скорости и углового ускорения в суммирующем вращении.