

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
Топ:
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Выпускная квалификационная работа: Основная часть ВКР, как правило, состоит из двух-трех глав, каждая из которых, в свою очередь...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Интересное:
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Способ угловой засечки применяют для разбивки недоступных
точек, находящихся на значительном расстоянии от исходных
пунктов.
Различают прямую и обратную угловые засечки.
В способе прямой угловой засечки положение на местности проектной точки С (рис. 1) находят отложением на исходных пунктах А и В проектных углов  1 и 2. Базисом засечки служит или специально измеренная сторона, или сторона разбивочной сети. Проектные углы 1 и 2 вычисляют как разность дирекционных углов сторон. Дирекционные углы находят из решения обратной геодезической задачи по проектным координатам определяемой точки и известным координатам исходных пунктов.
1 и 2. Базисом засечки служит или специально измеренная сторона, или сторона разбивочной сети. Проектные углы 1 и 2 вычисляют как разность дирекционных углов сторон. Дирекционные углы находят из решения обратной геодезической задачи по проектным координатам определяемой точки и известным координатам исходных пунктов.

Рисунок 1 − Схема разбивки способами прямой и линейной засечек
Способ обратной угловой засечки. На местности находят приближенно
положение О' разбиваемой точки О (рис. 2). В этой точке устанавливают теодолит и с требуемой точностью измеряют углы не менее чем на три
исходных пункта с известными координатами. По формулам обратной засечки вычисляют координаты приближенно определенной точки и сравнивают их с проектными значениями. По разности координат вычисляют величины редукции (угловой и линейный элементы) и смещают точку в проектное положение.
Для контроля на этой точке измеряют углы, вновь вычисляют ее координаты и сравнивают их с проектными. В случае недопустимых расхождений все действия повторяют.
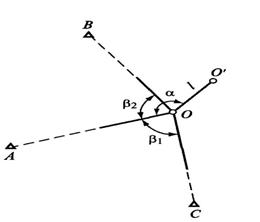
Рисунок 2 − Схема способа обратной угловой засечки
Способ линейной засечки
В способе линейной засечки положение выносимой в натуру точки С (см. рис. 1) определяют в пересечении проектных расстояний S1 и S2, отложенных от исходных точек А и В. Этот способ обычно применяют для разбивки осей строительных конструкций в случае, когда проектные расстояния не превышают длины мерного прибора.
|
|
Наиболее удобно разбивку производить при помощи двух рулеток. От точки А по рулетке откладывают расстояние S1, а от точки В по второй рулетке − S2. Перемещая обе рулетки при совмещенных нулях с центрами пунктов А и В,на пересечении концов отрезков S1 и S 2 находят положение определяемой точки С.
Способ полярных координат
Способ полярных координат широко применяют при разбивке осей зданий, сооружений и конструкций с пунктов теодолитных или полигонометрических ходов, когда эти пункты расположены сравнительно недалеко от выносимых в натуру точек.
В этом способе положение определяемой точки С (рис. 3) находят на местности путём отложения от направления АВ проектного угла и расстояния S. Проектный угол находится как разность дирекционных углов αАВ и αАС,вычисленных как и расстояние S из решения обратных задач по координатам точек А, В и С. Для контроля положение зафиксированной точки С можно проверить, измерив на пункте В угол β' и сравнив его со значением, полученным как разность дирекционных углов αВА и αВС.
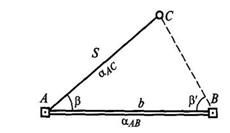 Рисунок 3 − Схема разбивки способом полярных координат
Рисунок 3 − Схема разбивки способом полярных координат
Если разбиваемая точка находится на значительном расстоянии от исходного пункта, то приходится несколько раз откладывать полярным способом проектные углы и расстояния, прокладывая проектный ход (рис. 4). При наличии прямой видимости с точки Сна точку В для контроля измеряют примычные углы  и
и  , образуя замкнутый угловой полигон, поэтому такой способ называют способом проектного полигона. При точных разбивочных работах углы полигона уравнивают, вычисляют по ним и проектным расстояниям координаты точки С, сравнивают их с проектными и при необходимости редуцируют в проектное положение.При редкой разбивочной основе способ проектного полигона может быть использован для разбивки всех точек пересечения основных осей сооружения от одного исходного пункта. В этом случае проектный ход с проектными углами и расстояниями прокладывают полностью.
, образуя замкнутый угловой полигон, поэтому такой способ называют способом проектного полигона. При точных разбивочных работах углы полигона уравнивают, вычисляют по ним и проектным расстояниям координаты точки С, сравнивают их с проектными и при необходимости редуцируют в проектное положение.При редкой разбивочной основе способ проектного полигона может быть использован для разбивки всех точек пересечения основных осей сооружения от одного исходного пункта. В этом случае проектный ход с проектными углами и расстояниями прокладывают полностью.
|
|
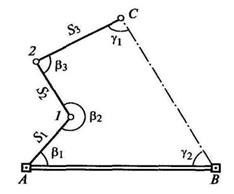
Рисунок 4 − Схема разбивки способом проектного полигона
|
|
|

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!