Данная САР предназначена
- для автоматического поддержания скорости вращения двигателя при изменении нагрузки на его валу;
- для автоматического ограничения пусковых и тормозных токов двигателя.
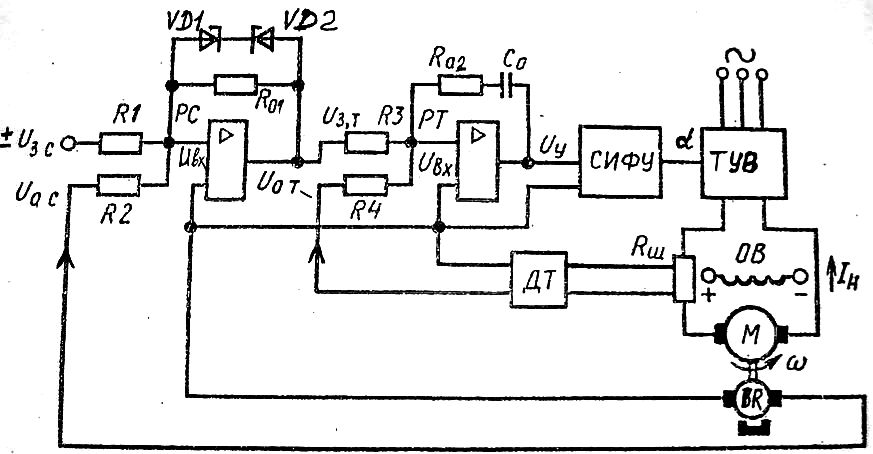
Назначение элементов схемы и действующих в схеме напряжений
Uзс – напряжение задания по скорости двигателя;
Uос – напряжение обратной связи по скорости двигателя;
Uвх.с. – напряжения на входе регулятора скорости РС;
Uзт – напряжение задания по току двигателя;
Uот – напряжение обратной связи по току двигателя;
Uвх.т . – напряжение на входе регулятора тока РТ;
Uу - напряжение управления;
Uα – последовательность коротких прямоугольных положительных импульсов с регулируемым углом α;
Uвых.тв – выходное напряжение тиристорного управляемого выпрямителя ТУВ.
М – обмотка якоря ДПТ;
ОВ – обмотка возбуждения ДПТ;
ВR – тахогенератор (датчик скорости вращения ДПТ);
Rш – шунт (на нем происходит падение напряжения, пропорциональное току двигателя);
ДТ – датчик тока двигателя (усилитель постоянного тока);
R1, R2 – сравнивающее устройство – делитель напряжения, со средней точки которого снимается сигнал рассогласования между Uзс и Uос;
РС – регулятор скорости – усилитель постоянного тока – усилитель постоянного тока – усиливает сигнал рассогласования Uзс и Uос;
R3, R4 – сравнивающее устройство – делитель напряжения, со средней точки которого снимается сигнал рассогласования между Uзт и Uот;
РТ – регулятор тока – усилитель постоянного тока – усиливает сигнал рассогласования между Uзт и Uот;
VD1 и VD2 – пороговое устройство – стабилитроны;
СИФУ – система импульсно-фазового управления – автоматически изменяет угол α, открывания тиристоров ТУВ в зависимости от величины напряжения управления Uу;
ТУВ – тиристорный управляемый выпрямитель - выпрямляет переменное сетевое напряжение Uс и регулирует величину постоянного напряжения Uвых.тв .
Принцип работы схемы в режиме ограничения пускового тока
При пуске двигателя на холостом ходу Uос мало, поэтому на входе РС присутствует большой по величине сигнал Uвх.с:
↑Uвх.с = Uзс – Uос↓ ≈ Uзс.
Поэтому, в одном из стабилитронов VD1 или VD2 (в зависимости от полярности Uзс) произойдет обратимый пробой р-n-перехода, а, следовательно, между входом и выходом регулятора скорости возникает перемычка, т.е. срабатывает пороговое устройство. На вход РТ через регулятор R3 поступает большое Uзт:
↑Uзт = Uвх.с ≈ Uзс .
Напряжение обратной связи по току Uот в момент пуска двигателя большое, поэтому на входе РТ присутствует малое напряжение Uвх.т:
↓Uвх.т = ↑Uзт – ↑Uот.
Поэтому, напряжение на выходе РТ (напряжение управления Uу) на входе СИФУ также мало, что вызывает появление на выходе СИФУ коротких положительных прямоугольных импульсов с большим углом α открывание тиристоров ТУВ – сигнал Uα (см. диаграмму работы СИФУ).

В результате, выходное напряжение Uвых.тв становится меньшим, а значит, ток, протекающий по обмотке якоря двигателя во время пуска двигателя мал:

Вывод: Таким образом, на время пуска двигателя ток в момент пуска якоря автоматически уменьшается (ограничивается). Аналогично САР работает и при возникновении тормозных токов двигателя.
Принцип работы схемы в режиме поддержания скорости вращения двигателя на заданном уровне
По мере разгона двигателя Uос увеличивается, поэтому Uвх.с постепенно уменьшается:
↓Uвх.с = Uзс – Uос↑.
Поэтому, в стабилитроне пробой прекращается, перемычка между входом и выходом РС пропадает, и регулятор скорости РС вступает в действие.
Предположим, что САР работает в установившемся режиме на холостом ходу при таких значениях Uу , Uα , Uвых. тв , которые обеспечивают заданную скорость вращения двигателя ω (в соответствии с Uзс – напряжением задания по скорости двигателя).
По мере увеличения нагрузки на валу двигателя его скорость будет стремитьсяк уменьшению. Поэтому, Uос также будет стремиться уменьшиться, а Uвх.с будет стремиться увеличиваться, но не до уровня пробоя стабилитрона:
↑Uвх.с = Uзс - Uос↓.
Последовательно усилившись в РС и в РТ, этот сигнал в качестве напряжения управления Uу большой величины поступает на вход СИФУ. По этому сигналу СИФУ уменьшает угол α открывания тиристоров ТУВ, а выходное напряжение Uвых.тв при этом увеличится. Это вызовет увеличение скорости вращения двигателя до заданного значения в соответствии с напряжением задания Uзс .
САР вновь приходит в установившийся режим до следующего изменения нагрузки на валу двигателя, а значит и изменения скорости вращения двигателя.
Таким образом, в этом режиме САР автоматически поддерживает заданную скорость вращения двигателя при увеличении и уменьшении нагрузки на его валу.
Резистор Rос1 и цепочка Rос2, Сос представляют собой местные обратные связи для операционных усилителей РС и РТ.
ЗАЧЕТ по модулю 3.2 (САР).
По имеющейся схеме САР и диаграммах работы СИФУ описать работу контура регулирования:
1 вариант – скорости двигателя при увеличении нагрузки на его валу;
2 вариант – тока двигателя при пуске;
3 вариант – скорости двигателя при уменьшении нагрузки на его валу.
Модуль 3.3. Системы автоматического управления.





