Теория механизмов подъемно-транспортных
Строительных и дорожных машин
Методические указания
к выполнению практических работ по дисциплине
«Теория подъёмно-транспортных, строительных, дорожных средств и оборудования», для студентов специальности 23.05.01
«Наземные транспортно-технологические средства»,
специализации «Подъемно-транспортные, строительные, дорожные средства и оборудование» очной и заочной форм обучения
Составитель: Кожевников В.А.,
Киреев В.П.
Самара
2015
УДК 69.002.5 + 625.7.08
Теория механизмов подъемно-транспортных, строительных и дорожных машин: методические указания к выполнению практических работ по дисциплине «Теория подъемно-транспортных, строительных, дорожных средств и оборудования», для студентов специальности 23.05.01 «Наземные транспортно-технологические средства», специализации «Подъемно-транспортные, строительные, дорожные средства и оборудование» очной и заочной форм обучения» / составитель: Кожевников В.А., Киреев В.П. – Самара: СамГУПС, 2015. – 30 с.
В методических указаниях изложено теоретическое описание процессов, происходящих в механизмах подъемно-транспортных, строительных и дорожных машин, представлены методики расчета их параметров, даны основные теоретические положения и порядок выполнения каждой практической работы.
Утверждены на заседании кафедры «СДМ», 01.04.2015г., протокол №8.
Печатаются по решению редакционно-издательского совета университета.
Составители: Вадим Александрович Кожевников,
Владимир Павлович Киреев
Рецензенты: к.т.н. доц. каф. СДМ СамГУПС А.Г. Жданов;
к.т.н., доц. каф. ПСЖД СамГУПС С.А. Галанский
Под редакцией составителей
Подписано в печать 00.00.2015. Формат 60×90 1/16.
Усл. печ. л. 2. Тираж 000 экз. Заказ 00.
© Самарский государственный университет путей сообщения, 2015
Введение
Знания которыми должны обладать инженеры специальности «Наземные транспортно-технологические средства» не должны ограничиваться только знаниями конструкций машин или методов организации ремонтных и эксплуатационных работ. Для более глубокого понимания факторов влияющих на конструктивные и эксплуатационные показатели машин необходимы теоретические знания, раскрывающие сущность физических процессов происходящих как внутри машины, так и в зоне ее взаимодействия с внешней рабочей средой.
Дисциплина «Теория подъемно-транспортных, строительных, дорожных средств и оборудования» С3.Б.26 относится к базовой части профессионального цикла.
Дисциплина имеет содержательно-методическую взаимосвязь с рядом дисциплин: «Конструкции подъемно-транспортных, строительных, дорожных средств и оборудования», «Грузоподъемные машины и оборудование», «Машины и оборудование непрерывного транспорта», «Строительные, дорожные машины и оборудование». В перечисленных дисциплинах большое внимание уделяется изучению механизмов подъема и передвижения, а данные методические указания посвящены изучению динамики указанных механизмов.
Для освоения данной дисциплины требуются знания, умения и навыки полученные при изучении следующих предшествующих дисциплин: «Математика», «Физика», «Теоретическая механика», «Теория механизмов и машин».
Дисциплина «Теория подъемно-транспортных, строительных, дорожных средств и оборудования» является предшествующей для освоения следующих дисциплин: «Грузоподъемные машины и оборудование», «Машины и оборудование непрерывного транспорта», «Строительные, дорожные машины и оборудование», «Путевые машины», «Проектирование подъемно-транспортных, строительных, дорожных средств и оборудования» выполнения научно-исследовательской работы С5.Н.1 и выпускной квалификационной работы.
В результате освоения дисциплины «Теория подъемно-транспортных, строительных, дорожных средств и оборудования» у обучающегося формируются общекультурные (ОК-7), профессиональные (ПК-10, ПК-15) и профессионально-специализированные компетенции (ПСК-2.1, ПСК-2.4, ПСК-2.7).
В результате освоения дисциплины студент должен:
- знать: физико-механические свойства грузов и грунтов; основы теории взаимодействия рабочих органов и движителей подъемно-транспортных, строительных, дорожных средств с окружающей средой (грузами, грунтом); основные параметры передач приводов подъемно-транспортных, строительных, дорожных средств; динамику приводов подъемно-транспортных, строительных, дорожных средств; тягово-динамические характеристики подъемно-транспортных, строительных, дорожных средств; основы теории конвейеров с гибким тяговым органом; основы теории конвейеров без тягового органа;
- уметь: определять физико-механические свойства грузов и грунтов; выполнять расчеты усилий взаимодействия рабочих органов подъемно-транспортных, строительных, дорожных средств при транспортировании, копании и резании грунтов; выполнять расчеты основных параметры передач приводов подъемно-транспортных, строительных, дорожных средств; выполнять расчеты тягово-скоростных свойств, параметров управляемости, устойчивости, проходимости, тормозной динамики и плавности хода подъемно-транспортных, строительных, дорожных средств и оборудования;
- владеть: методикой определения усилий взаимодействия рабочих органов подъемно-транспортных, строительных, дорожных средств при транспортировании, копании и резании грунтов; методикой определения основных параметры передач приводов подъемно-транспортных, строительных, дорожных средств; методикой определения тягово-скоростных свойств, параметров управляемости, устойчивости, проходимости, тормозной динамики и плавности хода подъемно-транспортных, строительных, дорожных средств и оборудования.
Методические указания разработаны в соответствии с рабочей программой дисциплины:
1.1. Исследование динамики грузоподъемного механизма (часть 1).
1.2. Исследование динамики грузоподъемного механизма (часть 2).
1.3. Определение суммарных динамических параметров механизма подъема, приведенных к его отдельным элементам.
1.4. Определение реакций на передних колесах и выносных опорах экскаватора.
1.5. Определение толкающего усилия на прицепном устройстве скрепера.
1.6. Определение удельного сопротивления качению машин.
Целью методических указаний является формирование у обучающихся теоретических знаний и умений касающихся принципов устройства и функционирования подъемно-транспортных, строительных, дорожных средств и оборудования.
Практическая работа № 1
Порядок выполнения работы
Исходные данные для расчета выдаются преподавателем.
1) Ознакомиться с основами теории оценки динамических нагрузок механизмов грузоподъемных машин (п. 1.1), с устройством для исследования динамики механизма (п. 1.2, рисунок 1.1), с выводом рабочих формул, необходимых для выполнения расчетов по экспериментальной оценки приведенного махового момента и коэффициента учета инерции масс деталей трансмиссии механизма (п. 1.3).
2) Изобразить кинематическую схему установки (рисунок 1.1) с необходимыми пояснениями и дать ее краткую характеристику.
3) Описать проведение исследования динамики и применяемые формулы. Рассмотреть работу устройства с одним инерционным диском на валу 3 (рисунок 1.1). По значениям показаний динамометра и формулам (1.6), (1.7) определить моменты сопротивления при свободном выбеге и при торможении. Рассмотреть работу устройства с отключенным тормозом. После окончания разгона механизма (при достижении максимальной частоты вращения ротора электродвигателя) происходит автоматическое отключение электродвигателя. При приближении к моменту автоматического отключения определяют максимальную частоту вращения ротора электродвигателя. В момент отключения электродвигателя фиксируется время неустановившегося движения системы до полной остановки (выбег). Затем определяется время неустановившегося движения (пуск).
Рассмотреть работу устройства с включенным тормозом и повторить все вычисления.
Рассмотреть работу устройства с двумя и тремя дисками, также при отключенном и включенном тормозе.
4) Заполнить таблицу вычислений (таблица 1.2) в следующем порядке:
− число инерционных дисков z, шт;
− моменты сопротивлению вращению вала механизма Mc1, Mc2 (Н∙м) по формулам (1.6) и (1.7);
− частота вращения вала электродвигателя n, об/мин;
− среднепусковой момент двигателя Mср.пуск , Н∙м;
− время неустановившегося движения (пуск) tп, с;
− время неустановившегося движения (выбег) tв, с;
− время неустановившегося движения (торможение) tт, с;
− маховый момент ротора электродвигателя  , Н∙м2;
, Н∙м2;
Таблица 1.2 − Результаты вычислений
| Наименование
| Обозначение
и формула
| Размер-ность
| Результаты вычислений
|
| 1. Число инерционных дисков
| z
| шт.
|
|
|
|
| 2. Момент сопротивлению вращению вала механизма
| 

| Н∙м
|
|
|
|
| 3. Среднепусковой момент двигателя
| Mср.пуск
| Н∙м
|
|
|
|
| 4. Частота вращения вала электродвигателя
| n
| об/мин
|
|
|
|
| 5. Время неустановившегося движения механизма (пуск)
| tп
| c
|
|
|
|
| 6. Время неустановившегося движения механизма (выбег)
| tв
| c
|
|
|
|
| 7. Время неустановившегося движения механизма (торможение)
| tт
| c
|
|
|
|
| 8. Маховый момент ротора электродвигателя
| 
| Н∙м2
|
|
|
|
| 9. Маховый момент тормозного шкива
| 
| Н∙м2
|
|
|
|
| 10. Маховый момент инерционных дисков
| 
| Н∙м2
|
|
|
|
| 11. Суммарный приведенный маховый момент вращающихся масс механизма
| 
| Н∙м2
|
|
|
|
| 12. Суммарный приведенный маховый момент вращающихся масс механизма
| 
| Н∙м2
|
|
|
|
| 13. Суммарный приведенный маховый момент вращающихся масс механизма
| 
| Н∙м2
|
|
|
|
| 14. Коэффициент учета инерции масс деталей трансмиссии механизма
| 
|
|
|
|
|
− маховый момент тормозного шкива  , Н∙м2;
, Н∙м2;
− маховый момент нескольких инерционных дисков  , из формулы (1.8), Н∙м2;
, из формулы (1.8), Н∙м2;
− вычислить суммарный приведенный маховый момент вращающихся масс механизма  по формуле (1.9);
по формуле (1.9);
− вычислить суммарный приведенный маховый момент вращающихся масс механизма по формуле (1.10);
− вычислить суммарный приведенный маховый момент вращающихся масс механизма по формуле (1.11);
− определить коэффициент учета инерции масс деталей трансмиссии механизма δ по формулам (1.12).
5) В заключение указать, как изменяются моменты инерции, маховые моменты вращающихся масс механизма, время разгона и замедления механизма по величине и соотношению. Установить возможные взаимозависимости исследуемых характеристик устройства и выполнить их графическое построение.
Контрольные вопросы
1. Как устроен механизм, динамика которого исследуется в практической работе?
2. Что такое маховые моменты одной вращающейся детали и как определяются его приведенные значения?
3. Какими способами рассчитывается маховый момент всего исследуемого в практической работе механизма?
4. Как определить коэффициент учета инерционных масс исследуемого в практической работе механизма, моменты инерции которых неизвестны, и чему равно числовое значение данного коэффициента?
5. Какими видами времени неустановившегося движения характеризуется исследуемый в практической работе механизм и чему равны их числовые значения?
6. Какими видами крутящих моментов характеризуется исследуемый в практической работе механизм и чему равны их числовые значения?
7. В какой последовательности должно производится исследование динамики механизма в данной практической работе?
Практическая работа № 2
Порядок выполнения работы
Исходные данные для расчета выдаются преподавателем.
1) Повторить основы теории оценки динамических нагрузок механизмов грузоподъемных машин (п. 1.1, практическая работа № 1). Ознакомиться с устройством для исследования динамики механизма (п. 2.1, рисунок 2.1), с выводом рабочих формул, необходимых для выполнения расчетов по оценке приведенного махового момента и коэффициента учета инерции масс деталей трансмиссии механизма (п. 2.2).
2) Изобразить кинематическую схему устройства (рисунок 2.1) с необходимыми пояснениями и дать ее краткую характеристику.
3) Описать проведение исследования динамики и пояснить применяемые формулы. Рассмотреть работу устройства с тремя инерционными дисками на валу 3 (рисунок 2.1). Посчитать передаточное отношение редуктора. Учитывая различный вес грузов на конце рычага тормоза по формуле (1.6) определить момент сопротивления при свободном выбеге (должно получиться три значения). Трижды рассмотреть работу устройства для трех грузов различного веса на конце рычага тормоза. После окончания разгона механизма (при достижении максимальной частоты вращения ротора электродвигателя) происходит автоматическое отключение электродвигателя. При приближении к моменту автоматического отключения определяют максимальную частоту вращения ротора электродвигателя. В момент отключения электродвигателя определяют время неустановившегося движения системы до полной остановки (время выбега). Затем определяют время неустановившегося движения (пуск).
4) Заполнить таблицу вычислений (таблица 2.2) в следующем порядке:
− число инерционных дисков z, шт;
− длинное плечо рычага L, м;
− короткое плечо рычага l, м;
− диаметр тормозного шкива  , м;
, м;
− передаточное отношение редуктора, uред;
− вес груза на конце рычага F, Н;
Таблица 2.2 − Результаты вычислений
| Наименование
| Обозначение и формула
| Размер-ность
| Результаты вычислений
|
| 1. Число инерционных дисков
| z
| шт.
|
|
|
|
| 2. Длинное плечо рычага
| L
| м
|
|
|
|
| 3. Короткое плечо рычага
| l
| м
|
|
|
|
| 4. Диаметр тормозного шкива
|
| м
|
|
|
|
| 5. Передаточное число редуктора
| uред
|
|
|
|
|
| 6. Вес груза, на конце рычага
| F
| Н
|
|
|
|
| 7. Усилие прижатия колодки к шкиву
| 
| Н
|
|
|
|
| 8. Момент сопротивления вращению вала механизма
|
| Н∙м
|
|
|
|
| 9. Момент, создаваемый грузоупорным тормозом
| 
| Н∙м
|
|
|
|
| 10. Частота вращения вала электродвигателя
| n
| об/мин
|
|
|
|
| 11. Частота вращения тихоходного вала установки
| ni
| об/мин
|
|
|
|
| 12. Время неустановившегося движения механизма (выбег)
| tв
| c
|
|
|
|
| 13. Время неустановившегося движения механизма (пуcк)
| tп
| c
|
|
|
|
| 14. Маховый момент ротора электродвигателя
|
| Н∙м2
|
|
|
|
| 15. Маховый момент редуктора
| 
| Н∙м2
|
|
|
|
| 16. Маховый момент тормозного шкива
|
| Н∙м2
|
|
|
|
| 17. Маховый момент тормозного шкива, приведенный к валу двигателя
| 
| Н∙м2
|
|
|
|
| 18. Маховый момент инерционных дисков, приведенный к валу двигателя
| 
| Н∙м2
|
|
|
|
| 19. Суммарный приведенный маховый момент вращающихся масс механизма
| 
| Н∙м2
|
|
|
|
| 20. Эквивалентный маховый момент вращающихся масс механизма, приведенный к тихоходному валу
| 
| Н∙м
|
|
|
|
| 21. Эквивалентный маховый момент тормоза, приведенный к валу двигателя
| 
| Н∙м2
|
|
|
|
| 22. Суммарный маховый момент
| 
| Н∙м2
|
|
|
|
| 23. Коэффициент учета инерции масс деталей трансмиссии механизма
| 
|
|
|
|
− вычислить усилие прижатия колодки к шкиву Fт, по формуле (2.2), Н; − момент сопротивлению вращению вала механизма Mc1, по формуле (1.6) Н∙м;
− вычислить момент сопротивления, создаваемый грузоупорным тормозом Mт по формуле (2.1), Н∙м;
− частота вращения вала электродвигателя n, об/мин;
− частота вращения тихоходного вала установки ni, об/мин;
− время неустановившегося движения (выбег) tв, с;
− время неустановившегося движения (пуск) tп, с;
− маховый момент ротора электродвигателя , Н∙м2;
− маховый момент редуктора , Н∙м2;
− маховый момент тормозного шкива , Н∙м2;
− маховый момент тормозного шкива приведенный к валу электродвигателя  , по формуле (1.4), Н∙м2;
, по формуле (1.4), Н∙м2;
− маховый момент нескольких инерционных дисков приведенный к валу электродвигателя  по формуле (1.4), Н∙м2;
по формуле (1.4), Н∙м2;
− вычислить суммарный приведенный маховый момент вращающихся масс механизма  по формуле (2.5), Н∙м2;
по формуле (2.5), Н∙м2;
− вычислить эквивалентный маховый момент тормоза приведенный к тихоходному валу  по формуле (2.6), Н∙м2;
по формуле (2.6), Н∙м2;
− вычислить эквивалентный маховый момент тормоза приведенный к валу электродвигателя по формуле (1.4), Н∙м2;
− вычислить суммарный маховый момент  определенный по знаменателю формулы (2.7), Н∙м2;
определенный по знаменателю формулы (2.7), Н∙м2;
− определить коэффициент учета инерции масс δ деталей трансмиссии механизма по формуле (2.7).
5) В заключение указать, что характеризует моменты инерции и маховые моменты вращающихся масс механизма, какова их размерность и соотношение, как их привести к быстроходному валу, чему равны приведенный маховый момент и коэффициент учета инерции масс деталей трансмиссии для опытной установки. Установить возможные взаимозависимости исследуемых характеристик устройства и выполнить их графическое построение.
Контрольные вопросы
1. Как устроен механизм, динамика которого исследуется в практической работе?
2. Что такое маховые моменты одной вращающейся детали и как определяются его приведенные значения?
3. Какими способами рассчитывается маховый момент всего исследуемого в практической работе механизма?
4. Как определить коэффициент учета инерционных масс исследуемого в практической работе механизма, моменты инерции которых неизвестны, и чему равно числовое значение данного коэффициента?
5. Какими видами времени неустановившегося движения характеризуется исследуемый в практической работе механизм и чему равны их числовые значения?
6. Какими видами крутящих моментов характеризуется исследуемый в практической работе механизм и чему равны их числовые значения?
7. В какой последовательности должно производится исследование динамики механизма в данной практической работе?
Практическая работа №3
Порядок выполнения работы
Находим суммарное значение моментов инерции, приведенных к валу двигателя:
 , (3.1)
, (3.1)
где δ – коэффициент неучтенных расчетом масс.
Находим суммарное значение моментов инерции, приведенных к выходному валу редуктора:
 . (3.2)
. (3.2)
Находим суммарное значение моментов инерции, приведенных к барабану:
 . (3.3)
. (3.3)
Определим суммарную приведенную к грузу массу вращающихся частей привода и груза:
 . (3.4)
. (3.4)
Контрольные вопросы
1. Как устроен механизм подъема грузоподъемной машины?
2. Что такое приведенный момент инерции?
3. Как определяется суммарный приведенный момент инерции всего механизма?
4. Как привести момент инерции какой-либо детали к валу электродвигателя?
5. Как изменится масса груза после приведения ее к валу электродвигателя?
6. Где рациональнее устанавливать тормозные устройства в кинематических цепях механизмов подъема?
Практическая работа №4
Порядок выполнения работы
Определяем положение центра масс рабочего оборудования экскаватора относительно оси вращения его поворотной части:
 . (4.1)
. (4.1)
Таблица 4.1 – Варианты исходных данных
| № Вар.
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| 
|
|
|
|
| 3,5
| 2,55
| 0,39
| 1,567
| 1,64
| 2,4
| 3,3
|
|
|
|
|
|
|
|
|
|
| 2,7
|
| 3,4
| 4,2
| 4,0
| 4,4
| 4,4
| 4,45
|
|
|
|
| 3,65
| 2,55
| 0,39
| 1,567
| 1,64
| 2,4
| 3,3
|
|
|
|
|
|
|
|
|
|
| 2,7
|
| 3,4
| 4,2
| 4,1
| 4,4
| 4,4
| 4,45
|
|
|
|
| 3,65
| 2,55
| 0,39
| 1,567
| 1,64
| 2,4
| 3,3
|
|
|
|
|
|
|
|
|
|
| 2,8
|
| 3,45
| 4,42
| 4,2
| 4,5
| 4,5
| 4,55
|
|
|
|
| 3,65
| 2,67
| 0,4
| 1,618
| 1,71
| 2,47
| 3,4
|
|
|
|
|
|
|
|
|
|
| 2,8
| 1,1
| 3.45
| 4,42
| 4,2
| 4,5
| 4,5
| 4,6
|
|
|
|
| 3,75
| 2,8
| 0,41
| 1,618
| 1,71
| 2,47
| 3,4
|
|
|
|
|
|
|
|
|
|
| 2,8
| 1,1
| 3,5
| 4,42
| 4,3
| 4,5
| 4,5
| 4,65
|
|
|
|
| 3,75
| 2,8
| 0,42
| 1,618
| 1,71
| 2,47
| 3,4
|
|
|
|
|
|
|
|
|
|
| 2,9
| 1,2
| 3,55
| 4,42
| 4,3
| 4,55
| 4,55
| 4,75
|
|
|
|
| 3,75
| 2,8
| 0,43
| 1,618
| 1,71
| 2,47
| 3,4
|
|
|
|
|
|
|
|
|
|
| 2,9
| 1,2
| 3,6
| 4,42
| 4,3
| 4,55
| 4,55
| 4,75
|
|
|
|
| 3,9
| 2,85
| 0,44
| 1,703
| 1,8
| 2,6
| 3,45
|
|
|
|
|
|
|
|
|
|
| 2,9
| 1,2
| 3,65
| 4,65
| 4,35
| 4,55
| 4,55
| 4,75
|
|
|
|
| 4,01
| 2,94
| 0,45
| 1,788
| 1,89
| 2,7
| 3,8
|
|
|
|
|
|
|
|
|
|
| 2,9
| 1,2
| 3,7
| 4,65
| 4,35
| 4,55
| 4,55
| 4,75
|
|
|
|
| 4,01
| 2,94
| 0,45
| 1,788
| 1,89
| 2,7
| 3,8
|
|
|
|
|
|
|
|
|
|
| 2,9
| 1,3
| 3,7
| 4,65
| 4,4
| 4,55
| 4,55
| 4,75
|
|
|
|
| 4,01
| 2,94
| 0,46
| 1,788
| 1,9
| 2,7
| 3,8
|
|
|
|
|
|
|
|
|
|
| 3,0
| 1,3
| 3,7
| 4,65
| 4,4
| 4,6
| 4,6
| 4,8
|
|
|
|
| 4,1
| 3,02
| 0,47
| 1,788
| 1,9
| 2,7
| 3,8
|
|
|
|
|
|
|
|
|
|
| 3,0
| 1,3
| 3,7
| 5,1
| 4,4
| 4,6
| 4,6
| 4,8
|
|
|
|
| 4,1
| 3,02
| 0,47
| 1,788
| 1,9
| 2,86
| 3,8
|
|
|
|
|
|
|
|
|
|
| 3,0
| 1,3
| 3,75
| 5,1
| 4,4
| 4,6
| 4,6
| 4,8
|
|
|
|
| 4,1
| 3,02
| 0,48
| 1,873
| 1,98
| 2,86
| 3,8
|
|
|
|
|
|
|
|
|
|
| 3,0
| 1,3
| 3,75
| 5,1
| 4,4
| 4,6
| 4,6
| 4,8
|
|
|
|
| 4,3
| 3,02
| 0,48
| 1,873
| 1,98
| 2,86
| 3,8
|
|
|
|
|
|
|
|
|
|
| 3,0
| 1,3
| 3,75
| 5,1
| 4,4
| 4,65
| 4,65
| 4,85
|
|
|
|
| 4,3
| 3,14
| 0,49
| 1,873
| 1,98
| 2,86
| 3,8
|
|
|
|
|
|
|
|
|
|
| 3,1
| 1,4
| 3,75
| 5,1
| 4,5
| 4,65
| 4,65
| 4,85
|
|
|
|
| 4,3
| 3,14
| 0,49
| 1,873
| 1,98
| 2,86
| 4,1
|
|
|
|
|
|
|
|
|
|
| 3,1
| 1,4
| 3,75
| 5,1
| 4,5
| 4,65
| 4,65
| 4,85
|
|
|
|
| 4,5
| 3,14
| 0,49
| 1,873
| 1,98
| 2,99
| 4,1
|
|
|
|
|
|
|
|
|
|
| 3,1
| 1,4
| 3,8
| 5,1
| 4,5
| 4,65
| 4,65
| 4,85
|
|
|
|
| 4,5
| 3,35
| 0,5
| 1,958
| 2,07
| 2,99
| 4,1
|
|
|
|
|
|
|
|
|
|
| 3,1
| 1,4
| 3,8
| 5,1
| 4,5
| 4,7
| 4,7
| 4,9
|
|
|
|
| 4,5
| 3,35
| 0,5
| 1,958
| 2,07
| 2,99
| 4,1
|
|
|
|
|
|
|
|
|
|
| 3,1
| 1,4
| 3,8
| 5,1
| 4,5
| 4,7
| 4,7
| 4,9
|
|
|
|
| 4,5
| 3,35
| 0,51
| 1,958
| 2,07
| 2,99
| 4,1
|
|
|
|
|
|
|
|
|
|
| 3,1
| 1,4
| 3,8
| 5,3
| 4,6
| 4,7
| 4,7
| 4,9
|
|
|
|
| 4,6
| 3,42
| 0,52
| 1,958
| 2,07
| 2,99
| 4,1
|
|
|
|
|
|
|
|
|
|
| 3,1
| 1,4
| 3,8
| 5,3
| 4,6
| 4,7
| 4,7
| 4,9
|
|
|
|
| 4,6
| 3,42
| 0,52
| 1,958
| 2,07
| 3,00
| 4,1
|
|
|
|
|
|
|
|
|
|
| 3,2
| 1,4
| 3,85
| 5,3
| 4,6
| 4,75
| 4,75
| 4,95
|
|
|
|
| 4,6
| 3,42
| 0,52
| 2,000
| 2,1
| 3,1
| 4,1
|
|
|
|
|
|
|
|
|
|
| 3,2
| 1,4
| 5,85
| 5,3
| 4,6
| 4,75
| 4,75
| 4,95
|
Найдем суммарную вертикальную нагрузку на поворотную часть машины
 . (4.2)
. (4.2)
Вычисляем расстояние  от точки приложения силы
от точки приложения силы  до оси вращения поворотной части экскаватора (рисунок 4.1, б):
до оси вращения поворотной части экскаватора (рисунок 4.1, б):
 ,
,
где  – расстояние от центра масс поворотной части машины до оси ее вращения, откуда
– расстояние от центра масс поворотной части машины до оси ее вращения, откуда
 .
.
Определим суммарную вертикальную нагрузку  от ходовой и поворотной части экскаватора
от ходовой и поворотной части экскаватора
 . (4.3)
. (4.3)
Вычисляем расстояние  от точки приложения силы до вертикали проходящей через ось передних колес экскаватора (рисунок 4.1, в)
от точки приложения силы до вертикали проходящей через ось передних колес экскаватора (рисунок 4.1, в)
 ,
,
откуда
 .
.
Рассчитываем вертикальную нагрузку RВ, действующую на выносные опоры экскаватора (рисунок 4.1, г):
 ,
,
откуда
 .
.
Рассчитываем вертикальную нагрузку RА, действующую на задние колеса экскаватора (рисунок 4.1, г)
 ,
,
откуда
 .
.
После вычислений можно сравнить нагрузки, действующие на передние колеса и выносные опоры экскаватора.
Контрольные вопросы
1. Как устроен одноковшовый экскаватор?
2. Какие основные нагрузки действуют на экскаватор при копании грунта?
3. Как определить центр масс рабочего оборудования экскаватора?
4. Как определить расчетом координаты расположения какой-либо составной части экскаватора относительно оси вращения поворотной платформы или ребра опрокидывания.
5. Сохранит или потеряет устойчивость экскаватор по результатам проведенного расчета?
6. Какие расчетные схемы используют для определения нагрузок на опоры экскаватора?
Практическая работа №5
УСТРОЙСТВЕ СКРЕПЕРА
Цель работы: Определить толкающее усилие на прицепном устройстве скрепера.
Общее устройство прицепного скрепера и исходные данные для расчета
На рисунке 5.1 представлена общая конструктивная схема прицепного скрепера. Ковш скрепера перемещается тягачом 1. Соединение с тягачом осуществляется при помощи прицепного устройства 2. Передний мост скрепера соединяется с ковшом 4 при помощи сидельно-сцепного устройства и хобота 3.
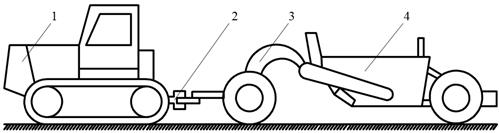
1 – тягач; 2 – прицепное устройство тягача; 3 – хобот; 4 – ковш скрепера
Рисунок 5.1 – Общее устройство прицепного скрепера
Необходимо найти толкающее усилие Pпр на прицепном устройстве скрепера, трогающегося с места, используя четыре метода динамики.
Исходными данными для выполнения расчета являются следующие величины:
m – масса прицепа, кг; t – время разгона,с; v – конечнаяскорость прицепа, м/c;
v0 – начальнаяскорость прицепа (v0 = 0 м/c); Pc – сопротивление движению прицепа, Н.
Исходные данные представлены в таблице 5.1.
Порядок выполнения работы
Определить толкающее усилие на прицепном устройстве скрепера с помощью четырех методов и выявить сходимость результатов расчета.
Первый метод. Представляем прицеп как одномассовую систему, на которую действует толкающая сила Pпр. Движение такой системы описывается уравнением
 , (5.1)
, (5.1)
где  – ускорение системы (второе приращение перемещения), м/с2.
– ускорение системы (второе приращение перемещения), м/с2.
Таблица 5.1 – Варианты исходных данных
| Вар. №
| m
| t
| v
| Pc
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 6,5
|
|
|
|
|
|
| 9,5
|
|
|
|
|
| 7,5
|
|
|
|
|
|
|
|
|
|
| 6,4
| 8,33
|
|
|
|
|






