
Рисунок 31
Км,i – коэффициент масштабирования i- го слагаемого. Алгоритм используется для получения взвешенной суммы нескольких (до 21) сигналов. В частности, он применяется вместе с алгоритмами регулирования для построения регуляторов соотношения либо для введения статической коррекции.
Число масштабируемых и суммируемых сигналов 0 <= m <= 20 и задается модификатором (немасштабируемый сигнал Х0 имеется всегда, независимо от значения модификатора).
Выходной сигнал алгоритма Y равен Х0+Км1*Х1+…+Км,m*Хm.
Алгоритм не инициирует обратный счет, но если по инициативе других алгоритмов на каскадный выход Y поступает команда отключения со значением начальных условий Y0, алгоритм выполняет процедуру обратного счета, формируя на каскадном входе Х0 сигнал рис. 10.39б
Этот сигнал вместе с командой отключения через вход Х0 транслируется предвключенному алгоритму.
Алгоритм не реагирует на команду запрета, но эта команда через вход Х0 транслируется предвключенному алгоритму.
УМД (44) Умножение-деление
Рисунок 32
КОР (45) Корень квадратный

Рисунок 33
МОД (46) Модуль

Рисунок 34
КУС (47) Кусочно-линейная функция
Рисунок 35
Алгоритм применяется для линеаризации нелинейной зависимости (например, датчика или регулирующего органа), а также для искусственного введения нелинейности (например, зоны нечувствительности, релейной характеристики и т.п.).
Выходной сигнал Y связан со значением сигнала на входе Х зависимостью, показанной на рис.36 и рис.37. Число отрезков определяется модификатором m и может задаваться в пределах 0<=m<=49. Координата конца отрезка определяется парой сигналов Хi, Yi(абсцисса и ордината конца отрезка), которые задаются соответствующими значениями сигналов на настроечных входах алгоритма.
При Х < Х1 и Х > Хm выходной сигнал Y=const. На выходе Nуч формируется число, равное номеру текущего участка кусочно-линейной зависимости (рис. 35).
Координаты Xi, Yi могут находиться в любом из четырех квадрантов. Как правило, координата Хi >= Хi-1 (i - номер отрезка). Если задано Хi < Хi-1, то формируется функция, показанная на рис.37. Можно задавать Хi=Х. В этом случае формируется функция, показанная на рис.38, причем при Хi=Х=Х выход Y=Yi. Алгоритм работает правильно, если ½Yi+1 - Yi½ <= 200%. При m=0 выходной сигнал Y=0 независимо от Х.

Рисунок 36

Рисунок 37
Рисунок 38
ОГР (48) Ограничение
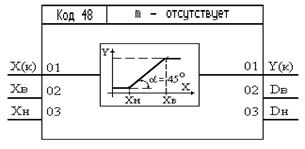
Рисунок 39
Хв – верхняя граница. Хн – нижняя граница.
Алгоритм будет правильно работать, только если Хв > Хн.
Если Х ³ Хв, то Dв=1 и Dн=0 и У=Хв. Если Х£Хн, то Dв=0 и Dн=1 и У=Хн.
Алгоритм является инициатором режима запрета. Далее описывается ситуация, связанная с процедурой обратного счёта. Если сигнал У достиг порога ограничения Хв или Хн, и в цепи есть следящие алгоритмы, на каскадном входе Х формируется команда запрета соответственно вверх или вниз. Эта команда транслируется предвключенному алгоритму.
Для предвключенных алгоритмов алгоритм ОГР не инициирует обратный счет, но если на каскадный выход Y поступит команда отключения со значением начальных условий Y0 или команда запрета, эти сигналы будут транслироваться предвключенному алгоритму через каскадный вход Х. Величина Y может превысить установленные уровни ограничения. Ограничитель этому не препятствует. Если Y ³ Хв, то Dв=1 и Dн=0. Если У£Хн, то Dв=0 и Dн=1.
После включения алгоритма выходной сигнал может находиться за порогами ограничения, однако изменение выходного сигнала возможно лишь в направлении, приближающем его к порогу ограничения. Если выходной сигнал изменяется именно в этом направлении, команда запрета не формируется, в противном случае формируется команда запрета, которая через вход Х транслируется предвключенному алгоритму.
СКС (49) Скользящее среднее
Обратите внимание на суммирование при Среж=1. В этом случае очередное слагаемое помещается в ячейку памяти для суммирования, только при появлении переднего фронта команды отсчёт, т.е. при появлении команды Сотс. Структура и работа алгоритма СКС соответствует алгоритму запаздывания ЗАП. Отличие алгоритма СКС заключается в наличии дополнительного сумматора, который усредняет значения сигналов на выходах всех ячеек запаздывания. При m=0 выходной сигнал Yср=Х и признак отсчета Dотс=0.
Если требуемое число отсчетов при усреднении превышает 12, алгоритмы СКС по аналогии с алгоритмами ЗАП включаются последовательно, при этом с помощью алгоритма суммирования с масштабированием СМА сигналы Yср,n от каждого n-го алгоритма СКС суммируются, и по каждому сигналу Yср,n устанавливается масштабный коэффициент, где mn - модификатор n-го алгоритма СКС.
При сигнале Ссбр=1 внутренний таймер обнуляется и во все ячейки памяти записывается текущее значение сигнала Х, при этом Yср=Х.
Алгоритм не имеет каскадных входов и выходов и блокирует процедуру обратного счета.

Рисунок 40
ДИС (50) Дискретное среднее
Алгоритм применяется для усреднения аналогового сигнала либо на фиксированном отрезке времени, либо за заданное число отсчетов.
Алгоритм содержит одну ячейку памяти, в которой суммируются значения входного сигнала, полученные за m отсчетов, после чего полученная сумма делится на m. Число отсчетов, за которое усредняется входной сигнал, задается модификатором и может находиться в пределах 0 £ m £ 99.
Команда отсчета формируется либо от внутреннего таймера (при Среж=0), либо подается извне на вход Сотс (при Среж=1). Время между отсчетами при работе от внутреннего таймера задается параметром Т. При внешнем управлении момент отсчета задается приходом переднего фронта сигнала Сотс.
Счетчик СТ считает текущее число отсчетов N, и в момент, когда N=m, среднее значение, вычисленное сумматором, запоминается в ячейке "память выхода", обновляя сигнал на выходе Yср. Тем самым заканчивается очередной интервал усреднения, после чего вплоть до окончания нового интервала сигнал Yср не изменяется. На выходе алгоритма N формируется текущий (внутри интервала усреднения) номер отсчета. На выходе Dотс в момент каждого отсчета в течение одного цикла работы контроллера Т0 (Т0=0.2-2 с) устанавливается Dотс=1, в остальное время Dост=0. После окончания интервала усреднения сигнал на выходе Dкон=1 (до окончания этого интервала Dкон=0).
Для того, чтобы инициализировать новый интервал усреднения, на вход перезапуска Спер следует подать команду перезапуска. По переднему фронту сигнала Спер память сумматора и счетчик числа отсчетов обнуляются, выходной сигнал Yср замораживается, устанавливается Dкон=0 и начинается новый интервал усреднения (сигнал Спер может при этом перейти в ноль или оставаться равным единице). Для того, чтобы интервалы усреднения непрерывно следовали друг за другом, выход Dкон необходимо соединить с входом Спер.
При команде сброса (Ссбр=1) выполняются те же действия, что и при команде перезапуска, за тем исключением, что при сбросе выходной сигнал Yср=Х, т.е. выходной сигнал равен текущему значению входного сигнала. После снятия сброса начинается новый интервал усреднения.
Если команда сброса снимается, когда при внешнем управлении Сотс=1, эта ситуация воспринимается как приход одной команды отсчета. Команда сброса приоритетна над командой перезапуска.
Если значение модификатора m=0, алгоритм работает так же, как при действии команды сброса.
Алгоритм не имеет каскадных входов и выходов и блокирует процедуру обратного счета.

Рисунок 41
МИН (51) Минимум

Рисунок 42
МКС (52) Максимум

Рисунок 43
СИТ (53) Среднее из трех

Рисунок 44
Пример. Х1=15. Х2=20. Х3=25. В этом случае Y=20. No=2. ХD- зона нечувствительности.
(ЭКС (54) Экстремум

Рисунок 45
Х – входная переменная. Тф- постоянная экспоненциального фильтра. DХ – зона нечувствительности. Vдоп – допустимая скорость изменения входного сигнала, Ссбр - команда сброса. Ymin - минимальное значение входного сигнала. Ymax – максимальное значение входного сигнала. Dmax – признак фиксации максимума. Dmin – признак фиксации минимума. Dпкм - признак поиска максимума. Dпмн - признак поиска минимума.
Алгоритм применяется для поиска и фиксации максимального и (или) минимального значения меняющегося во времени сигнала. В частности, алгоритм используется в задачах оптимизации.
Алгоритм содержит фильтр нижних частот и узел выделения экстремума ВЭК.
Входной сигнал подается на сигнальный вход алгоритма Х и, пройдя через фильтр нижних частот, поступает на вход узла выделения экстремума ВЭК.
На выходах алгоритма Ymax, Ymin фиксируется последнее соответственно максимальное и минимальное значение сигнала Х0, поступающее на вход ВЭК.
Алгоритм работает следующим образом. До тех пор пока имеется команда сброса (Ссбр=1), поиск экстремума не ведется и выходные сигналы Ymax = Ymin = Х0. Когда сигнал сброса снимается (Ссбр=0), выходные сигналы Ymax и Ymin замораживаются и начинается поиск экстремума. Как только найден максимум, выходной сигнал Ymax становится равным максимальному значению Х0. Когда алгоритм фиксирует минимум, выходной, выходной сигнал Ymin принимает значение, равное минимальному значению Х0. Выходы Ymax и Ymin остаются неизменными вплоть до обнаружения очередного экстремума - соответственно максимума и минимума.
В момент обнаружения максимума или минимума на время, равное времени цикла работы контроллера (т.е. на время от 0.2 до 2 с), на дискретных выходах соответственно Dmax или Dmin формируются дискретные сигналы Dmax=1 или Dmin=1.
На дискретных выходах Dпмк (поиск максимума) и Dпмн (поиск минимума) формируются сигналы, свидетельствующие о направлении поиска. В состоянии сброса поиск не ведется, и Dпмк = Dпмн = 0. Если в данный момент ведется поиск максимума, то Dпмк=1, а Dпмн=0; если ведется поиск минимума, то Dпмк=0, а Dпмн=1.
В алгоритме предусмотрены меры по повышению помехозащищенности процесса поиска: имеется фильтр нижних частот, имеется возможность введения зоны нечувствительности и предусмотрена возможность анализа на допустимую скорость изменения сигнала в районе экстремума. Эти меры могут применяться по отдельности или в любых сочетаниях.
Фильтр нижних частот имеет передаточную функцию
 ,
,
где Тф - постоянная времени фильтра.
Влияние зоны нечувствительности показано на рис.. Если на настроечном входе алгоритма DХ установлено значение зоны нечувствительности DХ = 0, то экстремум фиксируется сразу же, как только знак производной сменился на противоположный (именно такая ситуация представлена на рис.). Если введена зона нечувствительности (DХ > 0), то экстремум фиксируется не сразу, а лишь после того, как, пройдя экстремум, сигнал изменится на величину, большую DХ. Если же сигнал изменится на меньшую величину и затем вновь начнет изменяться в исходном направлении, экстремум не фиксируется. Значение DХ < 0 воспринимается алгоритмом как DХ = 0.
На входе Vдоп устанавливается допустимая скорость изменения сигнала, при которой фиксируется экстремум. Если Vдоп равно бесконечности, то ограничения на скорость не накладываются. В противном случае экстремум фиксируется лишь тогда, когда после прохождения экстремума (или при наличии зоны нечувствительности - после прохождения этой зоны) скорость изменения сигнала V £ Vдоп (рис.). Если V>Vдоп, то экстремум не фиксируется. Алгоритм не имеет каскадных входов и выходов и блокирует процедуру обратного счета.


Рисунок 46
МСШ (55) Масштабирование

Рисунок 47
А8. Аналого-дискретные преобразования





