В ходе выполнения курсового проекта должна быть разработана система автоматического контроля и регулирования на базе микропроцессорного контроллера Ремиконт Р-130, контроллеров серии «Контраст» или других. Контроллер Р‑130 — это компактное многоканальное многофункциональное микропроцессорное устройство, предназначенное для автоматического контроля, непрерывного и дискретного управления технологическими процессами в режиме реального времени. Контроллер фактически представляет специализированную вычислительную машину, неотъемлемой частью которой является процессор, память, сторож цикла и модули УСО.
Контроллер Р‑130 может решать как сравнительно простые, так и сложные задачи регулирования.
Ремиконт – ре гулирующий ми кропроцессорный конт роллер. Под контроллером в данном случае понимается специализированная вычислительная машина, предназначенная для непрерывной обработки информации в режиме реального времени, имеющая устройство связи с объектом управления (УСО), сторож цикла, лицевую панель (ЛП) с расположенными на ней цифровыми индикаторами и светодиодами. Обычно для программирования контроллеров используется специальное программное обеспечение (ПО), позволяющее его программировать. Такое ПО называют кросс-средством. Кросс-средством для контроллера Р-130 является редактор Редитор Р-130.
Основные области применения контроллера.
1. АСУ ТП малой и средней сложности предприятий с непрерывными или дискретными технологическими процессами различных отраслей (энергетические, химические, нефте- и газодобывающие, машиностроительные, сельскохозяйственные, пищевые производства, производство стройматериалов, предприятия коммунального хозяйства т.п.).
2. Управление механизмами, агрегатами, линиями и т.п. как автономно, так и в составе АСУ ТП.
Контроллер предназначен для решения следующих задач в режиме реального времени:
1) сбор информации с датчиков различных типов и ее первичная обработка (фильтрация сигналов, линеаризация характеристик датчиков и т.п.);
2) реализация алгоритмов проверки на достоверность входной информации;
3) выдача управляющих воздействий на исполнительные органы различных типов;
4) контроль технологических параметров по граничным значениям и защита технологического оборудования в аварийных ситуациях;
5) аналоговое регулирование прямых и косвенных параметров по различным законам;
6) реализация законов регулирования повышенной надёжности;
7) дискретное управление технологическими агрегатами, автоматический пуск и останов технологического оборудования;
8) математическая обработка информации по различным алгоритмам;
9) обмен данными с другими контроллерами по локальной сети в режиме реального времени;
аварийная, предупредительная и рабочая сигнализация;
индикация значений прямых и косвенных параметров, выдача значений параметров и различных сообщений на лицевую панель;
10) работа с различными SCADa-системами;
11) работа с использованием кросс-средств, т.е. используя ПЭВМ.
Кроме того, в контроллере осуществляется самоконтроль и диагностика всех устройств в режиме реального времени; тестирование аппаратных средств периодически, по команде оператора.
Ремиконт обрабатывает дискретные, аналоговые и импульсные входные сигналы, формирует дискретные, аналоговые и импульсные выходные сигналы.
В АСУ ТП контроллеры работают на среднем уровне. Контроллер может работать в качестве автономного изделия, решающего комплекс задач регулирования, логического управления, предоставления информации о процессе управления.
В настоящее время имеется интеллектуальный шлюз, обеспечивающий следующие функции:
· приём и ретрансляция данных между контроллерами Р-130 в сети «Транзит»,
· буферизация данных,
· выход на сети Ethernet, Profibus DP, ModBus,
· обмен данными с различными SCADA-системами.
Ремиконт имет достаточно большую библиотеку алгоритмов (до 80 алгоритмов):
Объекты с небольшим объемом автоматизации могут управляться одним Ремиконтом. Большие системы могут включать в себя несколько контроллеров, объединённых в сеть.
Состав изделия Ремиконт Р-130
Перечень блоков и узлов входящих в состав изделия РЕМИКОНТ Р-130
Таблица. 3.1
| Обозначение
| 4. Наименование
|
| БК-1
| Блок контроллера
|
| ПН-1
| Пульт настройки для технологического программирования блока контроллера
|
| РН-1
| Резисторы нормирующие
|
| МБС
| Межблочный соединитель
|
| КБС-0
| Клеммно-блочный соединитель для размножения общих точек
|
| КБС-1
| Клеммно-блочный соединитель для реализации приборных цепей БК-1 и подключения нагрузки к блокам БУТ-10,БУС-10 и БУМ-10
|
| КБС-2
| Клеммно-блочный соединитель для дискретных цепей ввода-вывода БК-1 и БПР-10
|
| КБС-3
| Клеммно-блочный соединитель для аналоговых цепей ввода-вывода БК-1
|
| БП-1
| Блок питания
|
| БУТ-10
| Блок усилителей сигналов низкого уровня
|
| БУС-10
| Блок усилителей сигналов низкого уровня резистивных датчиков (термосопротивлений)
|
| БУМ-10
| Блок усилителей мощности
|
| БПР-10
| Блок переключений
|
| БСТ-1
| Блок стирания
|
| БШ 1
| Блок шлюза
|
Блок контроллера БК-1
Блок контроллера БК-1 (БК) ведет обработку информации в цифровой форме, организуя вычисления по программам контроля и управления. Кроме того, в БК осуществляется тестирование аппаратных средств, а также алгоритмов обслуживания пульта настройки и лицевой панели. При программировании из библиотеки алгоритмов, находящейся в постоянном запоминающем устройстве (ПЗУ), извлекаются нужные алгоритмы и объединяются в систему заданной конфигурации. При необходимости в алгоритмах устанавливаются требуемые параметры и коэффициенты.
БК выполняет функции:
– преобразование аналоговых и дискретных входных сигналов во внутреннюю цифровую форму и обратно;
– преобразование сигналов, представленных в контроллере в цифро-вой форме, в аналоговые и дискретные выходные сигналы;
– обработка поступающей информации в соответствии с требуемыми алгоритмами управления;
– выработка диагностических дискретных сигналов (отказ БК или отказ интерфейса);
– прием и передача сигналов через интерфейсный канал цифровой последовательной связи;
– оперативный контроль и управление с помощью индикаторов и
клавиш, расположенных на лицевой панели блока;
– обмен информацией с верхним уровнем (с ПЭВМ).
Блок контроллера имеет приборное исполнение и предназначен для щитового утопленного монтажа. На лицевой панели блока размещены органы (кнопки, индикаторы) оперативного контроля и управления.
В основную часть блока контроллера входят:
– модуль процессора ПРЦ-10, имеющего непосредственную связь с аккумуляторной батареей, конструктивное исполнение которой позволяет не нарушать эту связь с целью сохранения памяти ПРЦ при извлечении модуля;
– модуль контроля и программирования МКП;
– модуль стабилизированного напряжения МСН-10, обеспечивающий питанием весь БК вместе с пультом настройки.
Внутри корпуса контроллера, вдоль шасси БК, размещены гнезда четырех разъемов, в которые устанавливаются модули. Два из них – модули ПРЦ и МКП – устанавливаются всегда независимо от модификации контроллера (базовый комплект). Два других разъёма (слота) предназначены для устройств связи с объектом (УСО), т.е. для модулей УСО. В переменную часть (проектно компонуемую) блока контроллера входят модули УСО. Состав переменной части зависит от выбранной модификации (типа) УСО контроллера. На задней панели расположены винт заземления и гнезда трех разъемов: одного – для подключения приборных цепей (питания, интерфейса, аварийных цепей) и двух – для подключения датчиков и исполнительных устройств (цепи УСО). БК питается от нестабилизированного напряжения 24 В постоянного тока (например, от блока питания БП-1). Пульт настройки подключается к БК через разъем, расположенный под крышкой на лицевой панели.
На шасси БК размещается также модуль стабилизатора напряжения МСН и узел лицевой панели.
Наименование модели БК определяет наименование контроллера в целом. Существуют две модели контроллера: регулирующая и логическая. Отличаются лицевой панелью и рядом алгоритмов, записанных в ПЗУ. УСО для обеих моделей может быть одинаковым. Регулирующая модель предназначена для решения задач автоматического контроля и регулирования, но может выполнять также логическую обработку дискретных сигналов. Органы оперативного управления позволяют управлять с ЛП контурами регулирования: изменять задание, переключать режимы, управлять исполнительными механизмами дистанционно с ЛП.
Каждая из моделей БК имеет 30 модификаций, отличающихся номенклатурой и числом входных и выходных сигналов.
Блок питания БП-1
Блок питания БП-1 (БП) подключается к промышленной сети переменного тока напряжением 220 или 240 В, частотой 50 или 60 Гц и вырабатывает три нестабилизированных напряжения 24 В постоянного тока (рис. 1). Эти напряжения используются для питания:
1) блока контроллера БК-1;
2) цепей дискретного входа-выхода БК-1;
3) цепей аналогового выхода БК-1;
4) интерфейсных цепей БК-1;
5) цепи аварийного выхода БК-1;
6) блока шлюза;
7) усилителей БУТ-10 и БУС-10.
Кроме того, БП обеспечивает безразрывность локальной управляющей сети "Транзит" при отказе одного из подключенных к сети контроллеров, а также имеет релейный выход, сигнализирующий об отказе БК-1. БП формирует аварийный сигнал в виде перекидного контакта реле РЭС-54А, который замыкается при отказе БК или БП или при отключении сетевого напряжения. БП рассчитан на навесной монтаж. Он содержит гнезда двух разъемов РП15-9 (Х1 и Х4) и две клеммные колодки под винт М4 (Х2 и Х3). Через разъем Х1 блок питания подключается к контроллеру. К разъему Х4 подключаются внешние цепи, требующие питания 24 В постоянного тока, а также цепи аварийной сигнализации. К клеммной колодке Х2 подключается сетевое питание 220В, а к колодке Х3 – внешние интерфейсные цепи сети «Транзит».
При выборе числа БП следует учитывать, с одной стороны, нагрузочную способность БП (одного) и, с другой, ток потребления тех нагрузок, которые предполагается подключить к БП. Если контроллер подключен к БП, то ток нагрузки цепей, подключаемых к разъёму Х4 не должен превышать 40 мA. Если контроллер не подключен, то к этому выходу можно подключить нагрузку с током потребления до 300 мA.
БП содержит реле, с помощью которого (по команде контроллера) передатчик контроллера замыкается на его приемник, а передатчик абонента – на приемник. Это позволяет, с одной стороны, выполнить тестирование интерфейсного канала контроллера и, с другой, – сохранить неразрывной локальную сеть " Транзит" при отказе контроллера или его интерфейсного канала.

Рис. 1. Схема подключения блока питания БП-1 к контроллеру
Схему блока питания можно представить несколько иначе.
Блок питания

Рисунок 3 – Блок питания
Блок переключателей БПР-10
Блок содержит 8 слаботочных реле типа РЭС-54А, перекидные контакты которых могут использоваться в цепях переключения, защиты, сигнализации, блокировок и т.п. Каждое реле может управляться независимо, однако, имеется возможность группового (одновременного) переключения. Предусмотрена также возможность группового запрета на переключение.
Обмотки реле подключаются к дискретным выходам блока контроллера, при этом для запитки обмоток необходимо внешнее напряжение 24 В (например, от БП-1). Обмотки реле гальванически связаны между собой, однако, каждый из перекидных контактов гальванически изолирован от всех других цепей. БПР рассчитан на навесной монтаж и содержит гнезда двух разъемов РП15-23. Через один разъем подаются входные сигналы, к другому разъему подключается нагрузка.
Клеммно-блочные соединители
Отдельные блоки Ремиконта имеют штепсельные разъемы РП-15. Потребитель может все внешние цепи подключать непосредственно к этим разъемам. Такой вариант предполагает, что у потребителя имеются собственные клеммные сборки, к которым подходят внешние кабельные связи. От этих сборок далее соединения ведутся монтажным проводом, который припаивается к вилкам разъемов РП-15
Если у потребителя клеммные сборки отсутствуют или по условиям монтажа паяные соединения недопустимы, используются специальные соединители, входящие в состав основного комплекта Ремиконта. Соединители позволяют обойтись без паяных соединений и всю коммутацию выполнить "под винт".
В состав данного стенда входят следующие виды соединителей:
¾ межблочный соединитель МБС;
¾ клеммно-блочный соединитель КБС-3;
¾ клеммно-блочный соединитель КБС-2.
МБС применяется для связи приборных цепей блока контроллера с блоком питания. Межблочный соединитель представляет собой отрезок кабеля, заканчивающийся с обеих сторон вилками разъема РП-15. При монтаже одна вилка вставляется в гнездо блока контроллера, другая – в гнездо блока питания.
КБС-3 представляет собой отрезок кабеля, на одной стороне которого смонтирована вилка разъема РП15-23, а на другой – трехрядная клеммная колодка на 24 клеммы с распаянными на ее внутренней стороне нормирующими резисторами (РН). Этот соединитель применяется для подключения "под винт" входных и выходных аналоговых цепей блока контроллера. C помощью резисторов входные сигналы от 0 до 5 мА, от 0 до 20 мА, от 4 до 20 мА и от 0 до 10 В преобразуются в сигналы от 0 до 2 В, поступающие на вход контроллера, а вернее на модуль МАС. Благодаря такому способу монтажа, при отключении контроллера сохраняется безразрывность входной токовой петли. Для выбора соответствующих резисторов клеммная колодка имеет поле перемычек "под винт", с помощью которых задается диапазон входных сигналов. Номиналы резисторов, установленных в клеммно-блочном соединителе, аналогичны номиналам нормирующих резисторов РН.
Клеммно-блочный соединитель КБС-2 предназначен для подключения дискретных сигналов. Нормирующих резисторов не имеет.
Модули УСО
Блок контроллера имеет приборное исполнение и предназначен для щитового утопленного монтажа. На лицевой панели блока размещены органы оперативного контроля и управления. На задней панели расположены винт заземления и гнезда трех разъемов: одного – для подключения приборных цепей (питания, интерфейса, аварийных цепей) и двух – для подключения датчиков и исполнительных устройств (для устройств связи с объектом - УСО). БК питается от нестабилизированного напряжения 24 В постоянного тока (от блока питания БП-1). Пульт настройки (ПН-1) подключается к БК через разъем, расположенный на лицевой панели. В лаборатории ПН-1 подключают через промежуточный клеммник. Рейка с промежуточными клеммниками расположена на щите под контроллерами.
Система ввода-вывода сигналов с УСО контроллера обеспечивает ввод-вывод сигналов следующих типов:
входные аналоговые сигналы;
выходные аналоговые сигналы;
входные дискретные сигналы;
выходные дискретные/импульсные сигналы;
входные число-импульсные сигналы.
Тип УСО двух контроллеров, установленных на стенде, равен 15. Это означает, что в группе А установлен модуль аналоговых сигналов МАС (УСО тип 1), а в группе Б – модуль дискретных сигналов МСД (УСО тип 5). Поэтому тип УСО равен 15 или, говоря проще, тип УСО15. Следует отметить, что в состав модуля МАС входят аналого-цифровой (АЦП) и цифро-аналоговый (ЦАП) преобразователи, поэтому и назвали этот модуль МАС, а не АЦП или ЦАП. В состав модуля МСД также входят два преобразователя: дискретно-цифровой (ДЦП) и цифро-дискретный (ЦДП).
Внешнее расположение разъёмов на контроллере приведено на рис.2 Две платы УСО связаны кабелем с двумя разъёмами, расположенными на задней стороне контроллера. Эти разъёмы называются: группа А (Гр.А) и группа Б (Гр.Б). Сигналы подают не на сами разъёмы, а через клеммно-блочные соединители (КБС). Каждое из этих гнезд связано со "своим" разъемом, расположенным на задней панели блока, причем эти разъемы также обозначаются "Группа А" и "Группа Б". Цепи группы А подключаются к разъему «Гр. А», цепи группы Б - к нижнему разъему «Гр. Б», если смотреть на контроллер с задней стороны. Для подключения аналоговых сигналов, в нашем случае к Гр. А, следует использовать КБС-3, а для подключения дискретных сигналов – КБС-2. На стенде аналоговые и дискретные сигналы подключены к модулям УСО напрямую, т.е. без КБС.
На шасси БК размещается также модуль стабилизатора напряжения МСН и узел лицевой панели.
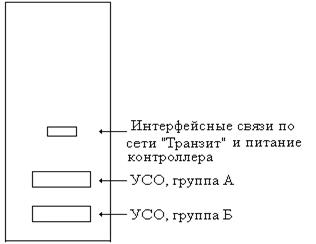
Рис. 2. Внешние связи контроллера Р-130 (вид сзади)
Схема внешних соединений для групп А и Б однозначно определяется типом модуля УСО, связанного с разъемом соответствующей группы. В контроллере Р-130 имеется семь типов модулей УСО. Эти модули определяют семь типов входов-выходов, отличающихся типом сигналов и сочетанием входов и выходов. Модули УСО и вид лицевой панели определяют модификацию блока БК. Оба разъема УСО имеют тип РП15-23 на 23 контакта, из которых используется только 21. Оба разъёма расположены на задней части корпуса контроллера. Двухзначный код модификации контроллера образуется путем соединения двух однозначных номеров, характеризующих тип входа-выхода для групп А и Б, при этом старшая цифра кода модификации равна типу входа-выхода группы А, а младшая цифра – группы Б. Например, модификация 15 означает, что в первом слоте размещена плата (модуль) МАС. К разъему УСО группы А должны подключаться аналоговые сигналы (8 аналоговых входов и 2 аналоговых выхода). Во втором слоте размещен модуль дискретных сигналов МСД, т.е. к разъему группы Б должны подключаться дискретные сигналы (8 дискретных входов и 8 дискретных выходов). На рис.3 представлена фотография двух устройств локальной сети «Транзит»: блок сопряжения с ПЭВМ (шлюз) и контроллер Р-130.
Таблица 1
| Код модуля
(тип УСО)
| Обозначение модуля
| Число входов-выходов
|
|
| -
| Модуль отсутствует
|
|
| МАС
| 8 аналоговых входов и 2 аналоговых выхода (8AI/2AO)
|
|
| МДА
| 8 аналоговых входов и 4 дискретных выхода (8AI/4DO)
|
|
| МСД 0/16
| 16 дискретных выходов (16DO)
|
|
| МСД 4/12
| 4 дискретных входа и 12 дискретных выходов (4DI/12DO)
|
|
| МСД 8/8
| 8 дискретных входов и 8 дискретных выходов (8DI/8DO)
|
|
| МСД 12/4
| 12 дискретных входов и 4 дискретных выхода (12DI/4DO)
|
|
| МСД 16/0
| 16 дискретных входов (16DI)
|

Рис. 3. Вид сзади на шлюз и контроллер






