

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Интересное:
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
| Пределы регулирования напряжения и частоты | Измерено | Вычислено | ||||||||
| U1, B | I1, A | P1, Bт | n, об/мин | M, Н×м | n*, o.e. | M*, o.e. | сos j1, o.e. | P2, Bт | h, o.e. | |
| U1 = 88 В f* = 0,4 | ||||||||||
| U1 = 132 В f* = 0,6 | ||||||||||
| U1 = 176 В f* = 0,8 | ||||||||||
| U1 = 220 В f* = 1 |
 4. По полученным данным построить механические характеристики для
4. По полученным данным построить механические характеристики для
f* = 0,4; 0,6; 0,8; 1, n* = f(M*),
(рис. 23.2). где n1 = 1500 об/мин – синхронная частота вращения; М* = М/Мн, где Мн – номинальный вращающий момент;  , где Рн – номинальная мощность двигателя; nн –
, где Рн – номинальная мощность двигателя; nн –
номинальная частота вращения двигателя.
5. По результатам анализа измеренных параметров сделать вывод.
Рекомендуемая литература: [1, 2, 3, 5].
ЛАБОРАТОРНАЯ РАБОТА № 24
ИСПЫТАНИЕ АСИНХРОННОЙ МАШИНЫ
В РЕЖИМЕ ГЕНЕРАТОРА
Цель работы: ознакомление со способами перевода асинхронной машины в генераторный режим и снятие рабочих характеристик в этом режиме.
Содержание и порядок выполнения работы
Асинхронная машина, как любая электрическая машина, обратима, т. е. асинхронный двигатель с короткозамкнутым ротором может работать в генераторном режиме. Генераторный режим осуществляется при работе машины на сеть, питаемую синхронным генератором (схема независимого возбуждения), и при работе асинхронной машины на изолированную сеть при наличии батареи конденсаторов достаточной емкости (схема самовозбуждения).
В обоих случаях для создания магнитного поля требуется реактивный ток. В первом случае при параллельной работе с сетью реактивный ток потребляется из сети, во втором – источником реактивного тока являются конденсаторы.
|
|
Генераторный режим при независимом возбуждении. Для того чтобы асинхронный двигатель перевести в генераторный режим, требуется с помощью какого-либо двигателя увеличить частоту вращения его ротора и довести ее до частоты вращения больше синхронной: n1 = 60 f1/P.
При этом направление реактивной мощности остается прежним, т. е. машина продолжает потреблять реактивную мощность, необходимую для создания вращающегося магнитного поля, а направление активной мощности меняется, т. е. машина начинает отдавать ее в сеть.
Активную мощность, отдаваемую асинхронным генератором в сеть, регулируют изменением величины отрицательного скольжения (частотой вращения ротора n), меняя механическую мощность, подводимую со стороны первичного двигателя.
Номинальную мощность асинхронный генератор развивает (как и асинхронный двигатель) при относительно малых скольжениях, порядка нескольких процентов. Последнее обстоятельство необходимо учитывать при загрузке асинхронного генератора, медленнои осторожно повышая частоту вращения ротора, начиная с синхронной.
Рабочие характеристики асинхронного генератора. Для снятия рабочих характеристик асинхронного генератора, работающего параллельно с сетью, собирают схему (рис. 24.1), когда батарея конденсатора отключена. На схеме показаны двигатель постоянного тока параллельного возбуждения и асинхронная машина, соединенные между собой валами. Для того, чтобы асинхронная машина работала в генераторном режиме, поступают следующим образом: запускают вначале асинхронную машину в двигательном режиме и замечают ее направление вращения, затем запускают двигатель постоянного тока, направление которого должно быть тем же. В противном случае меняют его направление вращения.

Рис. 24.1. Схема испытания асинхронного генератора
Если направление вращения постоянного тока совпадает с направлением вращения асинхронной машины, его частоту вращения увеличивают до синхронной. Это определяется по стробоскопическому диску, сектора которого должны остановиться. После этого включают в сеть асинхронную машину.
|
|
Если n = n1, то скольжение S = 0. Такой режим будет являться идеальным холостым ходом асинхронной машины. Для снятия рабочих характеристик требуется постепенно увеличивать частоту вращения двигателя постоянного тока с помощью регулировочного реостата Rрег, при этом будет увеличиваться отдача активной мощности асинхронной машины в сеть. Показания приборов записываются в табл. 24.1.
Таблица 24.1
Данные испытаний работы асинхронного генератора
параллельно с сетью
| Измерено | Вычислено | |||||||||
| Uд, В | Iд, А | Р2г, Вт | Iг, А | nск, об/мин | Uфг, В | Р1г, Вт | n, об/мин | сosj, о.е. | h, о.е. | S, о.е. |
Асинхронную машину следует загружать выше номинальной мощности.
По измеренным и вычисленным параметрам строятся рабочие характеристики. Рабочими характеристиками называются зависимости Iг, h, сosj, S = f(P2).
Частота скольжения определяется по стробоскопическому диску путем подсчета числа оборотов его секторов в минуту. Мощность, отдаваемая в сеть генератором Р2Г = 3 Uфг Iг сosj. Мощность, потребляемая асинхронным генератором
P1г = Uд Iд / hд,
где hд – кпд двигателя постоянного тока. Берется hд = 0,8. А кпд асинхронного генератора
h = P2г / P1г.
Коэффициент мощности
cos j =  .
.
Скольжение
S =  .
.
Режим работы асинхронного генератора с самовозбуждением.
Работа асинхронного генератора в автономном режиме без связи с сетью, питаемой синхронными генераторами, возможна только при наличии источника опережающего тока, которым служит конденсаторная батарея (рис. 24.2) [1].
При вращении ротора приводным двигателем в обмотке статора индуктируется небольшая по величине эдс Еост за счет остаточного магнитного поля ротора. Эта эдс вызывает в батарее конденсаторов ток IС, который опережает по фазе Еост на угол p/ 2 и совпадает по фазе с остаточным магнитным потоком Фост. Этот ток приводит к росту результирующего магнитного потока и, соответственно, увеличению эдс Е1. Процесс нарастания тока и эдс ограничивается насыщением магнитной цепи генератора и емкостью конденсаторов. При постоянной скорости с повышением нагрузки напряжение и частота тока генератора будут уменьшаться. Для поддержания этих значений постоянными требуется увеличивать частоту вращения ротора за счет повышения скорости первичного двигателя.
|
|
В лабораторной работе требуется возбудить асинхронный генератор и сделать три измерения его параметров для различной нагрузки и записать их в табл. 24.2.
Таблица 24.2
Данные испытаний работы асинхронного генератора
с самовозбуждением
| U, В | I, А | Р, Вт | nск, об/мин | n, об/мин | сosj, о.е. |
По результатам лабораторной работы требуется сделать выводы.
Рекомендуемая литература: [1].
ЛАБОРАТОРНАЯ РАБОТА № 25
ИССЛЕДОВАНИЕ СИСТЕМЫ
«МАГНИТНЫЙ УСИЛИТЕЛЬ–ДВИГАТЕЛЬ»
Цель работы: исследование механических характеристик электродвигателя постоянного тока при питании от магнитного усилителя.
Содержание работы
Катушка с ферромагнитным сердечником может быть регулятором некоторых электрических величин. Если такую катушку включить в цепь какого либо приемника, то при изменении длины воздушного зазора сердечника изменится индуктивное сопротивление катушки, а следовательно, – и величина тока, напряжения, мощности приемника. Но этот зазор регулировать сложно. Поэтому в настоящее время получил распространение другой способ изменения индуктивного сопротивления катушки, заключающийся в подмагничивании сердечника дополнительной катушкой, питаемой постоянным током.
На этом принципе работают магнитные усилители (МУ), в которых незначительное приращение тока, напряжения или мощности в подпитывающей катушке вызывает существенное приращение тока, напряжения или мощности в приемнике, причём быстро.
Вариант устройства МУ показан на рис 25.1.

Рис. 25.1.Схема МУ с выходом на переменномтоке
Основу магнитного усилителя составляют два ферромагнитных сердечника, на каждом из которых расположены рабочие обмотки ОР1 и ОР2 и обмотки управления ОУ1 и ОУ2.
В цепь рабочих обмоток включен приемник с сопротивлением RП, например электрический двигатель переменного тока.
|
|
Обмотки управления питаются от источника постоянного тока, они включены последовательно-встречно, что позволяет существенно уменьшить переменную составляющую тока в цепи управления, возникающую из-за магнитной связи между обмотками ОР и ОУ. Цепь ОУ является входной, а цепь ОР – выходной цепью МУ.
При изменении постоянного тока в ОУ изменяется величина постоянного магнитного потока, в связи с этим изменяется магнитная проницаемость и величина индуктивного сопротивления в цепи приёмника.
Так, при отсутствии подмагничивающего тока индуктивность сердечников, индуктивное сопротивление ОР будут наибольшими, а ток через приемник – наименьшим. С увеличением тока подмагничивания будет происходить насыщение стали, а следовательно, – уменьшение магнитной проницаемости, индуктивного сопротивления ОР, но увеличится сила тока через приемник при неизменном напряжении, что можно увидеть на рис. 25.2.
 Одной из важнейших величин, характеризующих магнитные усилители, является коэффициент усиления.
Одной из важнейших величин, характеризующих магнитные усилители, является коэффициент усиления.
Коэффициент усиления по току представляет собой отношение приращения тока приемника к приращению тока управления
 .
.
Коэффициент усиления по напряжению Ku – это отношение приращения напряжения потребителя к приращению напряжения обмотки управления:
 .
.
Коэффициент усиления мощности выражается уравнением
 ,
,
или  .
.
Магнитный усилитель, изображенный на рис. 3.1, называется усилителем с выходом на переменном токе. Если потребитель рассчитан на питание постоянным током, то его включают через выпрямитель, а магнитный усилитель называют усилителем с выходом на постоянном токе.
В некоторых конструкциях МУ сердечник выполнен трехстержневым с трехфазной схемой выпрямления.
В автоматизированном электроприводе используют обмотки (ОС) для обратной связи. Если ток, протекающий по обмотке ОС, совпадает с током в ОУ (положительная обратная связь), то в этом случае увеличивается коэффициент усиления и быстродействие. Если такового совпадения токов не происходит (отрицательная обратная связь), то наблюдается стабилизация процесса.
В лабораторной работе использован трехфазный магнитный усилитель с выходом на постоянном токе, питающий двигатель постоянного тока с независимым возбуждением.
Такая система электропривода «магнитный усилитель–двигатель» находила применение в промышленности в основном для нереверсивных механизмов небольшой мощности (до 10 кВт.).
К достоинствам магнитного усилителя как управляемого преобразователя для питания двигателя постоянного тока прежде всего следует отнести его высокую надежность в силу отсутствия вращающихся частей и подвижных контактов, практически неограниченный срок службы, простоту обслуживания, сравнительно высокий кпд и простоту суммирования управляющих сигналов. Недостатками их являются большие габариты и масса, а также значительная инерционность.
|
|
Основная зависимость, по которой можно судить о регулировочных свойствах МУ как преобразователя, – его нагрузочная характеристика «вход–выход», т. е. зависимость напряжения на выходе МУ от намагничивающей силы (напряжения или тока) управления при определенном постоянном значении тока нагрузки Un = f(Iу) при In = const.
При работе МУ на двигатель его нагрузка зависит от скорости двигателя. С изменением скорости двигателя нагрузка МУ меняется и, следовательно, меняется его характеристика. Так как нагрузка и скорость двигателя непостоянны, то характеристики МУ представляются семейством зависимостей, снятых при различных значениях тока нагрузки и скорости двигателя.
Для расчета скоростных характеристик, определения коэффициента передачи (усиления) МУ, коэффициентов обратных связей и заданного напряжения в замкнутой системе «магнитный усилитель – двигатель» постоянного тока пользуются регулировочными характеристиками, представляющими собой зависимости выходного напряжения усилителя Un (напряжения на двигателе) от напряжения управления Un = f(Uy) при токе нагрузки In = const. Такие характеристики представлены семейством кривых на рис. 25.3.
При анализе работы системы автоматического управления (САУ) с магнитным усилителем в статических и динамических режимах удобно пользоваться токовыми регулировочными характеристиками, которые представляют собой зависимости тока нагрузки МУ от тока управления при постоянной скорости. Семейство этих характеристик представлено на рис. 25.4.
 Рис. 25.3. Семейство регулировочных характеристик Un = f(Uy) при In = const
Рис. 25.3. Семейство регулировочных характеристик Un = f(Uy) при In = const
|  Рис. 25.4. Семейство токовых регулировочных характеристик In = f(Iy) при Ω = const
Рис. 25.4. Семейство токовых регулировочных характеристик In = f(Iy) при Ω = const
|
Коэффициент усиления МУ по напряжению определяется по регулировочным характеристикам (см. рис. 25.3) при постоянном токе нагрузки усилителя и является функцией напряжения управления и тока нагрузки усилителя (тока двигателя),  ,
,
 .
.
Коэффициент усиления МУ по току определяется по токовым регулировочным характеристикам (см. рис. 25.4) при постоянной скорости двигателя и является функцией тока управления и скорости двигателя
 .
.
Порядок выполнения работы
1. Собрать схему исследования МУ (рис. 25.5).
2. Снять регулировочную характеристику Un = f(Uy) при In = const. Данные записать в табл. 25.1.
Таблица 25.1
Результаты регулировочной характеристики Un = f(Uy) при In = const
| Iп1 = | Iп2 = | Iп2 = | Iп2 = | ||||
| Uу, В | Uп, В | Uу, В | Uп, В | Uу, В | Uп, В | Uу, В | Uп, В |
3. Снять регулировочную характеристику In = f(Iy) при W = const. Данные записать в табл. 25.2.
Таблица 25.2
Результаты регулировочной характеристики In = f(Iy) при W = const
| W1 = | W2 = | W3 = | W4 = | ||||
| Iу, А | Iп, А | Iу, А | Iп, А | Iу, А | Iп, А | Iу, А | Iп, А |
4. По результатам опытов определить коэффициенты усиления по напряжению
 ,
, 
5. Снять механические характеристики, результаты опыта занести в табл. 25.3.
Таблица 25.3
Данные исследований системы «МУ – двигатель»
| Режим испытания | Измерено | Вычислено | ||||||||||||||||
| U1Ф, В | I1Ф, А | Р1Ф, Вт | Uп, В | Iп, А | Iу, А | Uу, В | n, об/мин | M, кгм | P1, Вт | P2д, Вт | P2у, Вт | сosφ, о. е. | KP | ηМУ, о. е. | ηДВ, о. е. | η, % | ||
| Uп = 0,5 Uпн | ||||||||||||||||||
| Uп = Uпн |
Рис. 25.5. Схема исследования системы «магнитный усилитель-двигатель»
Расчетные формулы:
Uпн = 220 В; Р1 = 3Р1ф; Р2дв = 1,027 М n;
Р2му = Uп Iп; 




6. Построить механические характеристики n = f(M) для U = 0,5UПН,
U = UПН.
7. Построить зависимости ηму; ηдв; η = f(Iп).
Рекомендуемая литература: [5].
Лабораторная работа № 26
ИССЛЕДОВАНИЕ СИСТЕМЫ «ГЕНЕРАТОР–ДВИГАТЕЛЬ»
Цель работы: ознакомление с основными способами регулирования скорости двигателя постоянного тока путем изменения напряжения на якоре и изменением тока в цепи возбуждения двигателя; ознакомление с неавтоматическим управлением системой «генератор–двигатель».
Содержание работы
Уравнение скоростной характеристики двигателя постоянного тока для установившегося режима имеет вид
n =  , (1)
, (1)
где U – напряжение сети, В; Iа – ток якоря, А; Rа – сопротивление обмотки якоря, дополнительных полюсов и щеточного контакта, Ом; Ке =  – постоянный коэффициент, зависящий от параметров данного двигателя (Р – число пар полюсов; N – число проводников обмотки якоря, а – число параллельных ветвей обмотки якоря); Ф – результирующий магнитный поток двигателя, Вб; n – частота вращения якоря двигателя, об/мин. Из уравнения (1) следует, что частоту вращения двигателя постоянного тока можно регулировать тремя способами:
– постоянный коэффициент, зависящий от параметров данного двигателя (Р – число пар полюсов; N – число проводников обмотки якоря, а – число параллельных ветвей обмотки якоря); Ф – результирующий магнитный поток двигателя, Вб; n – частота вращения якоря двигателя, об/мин. Из уравнения (1) следует, что частоту вращения двигателя постоянного тока можно регулировать тремя способами:
1) изменением подводимого к двигателю напряжения U;
2) изменением магнитного потока током возбуждения;
3) введением сопротивления в цепи якоря Rд. Для электроприводов, требующих широкого диапазона регулирования частоты вращения, очень широко используют систему «генератор-двигатель» («Г–Д»), упрощенная схема которой приведена на рис. 26.1.
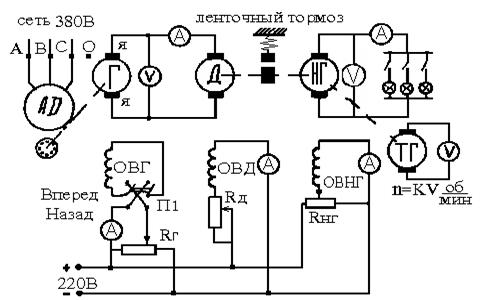
Рис. 26.1 Принципиальная схема системы (Г–Д)
В систему «Г–Д» входят следующие машины: первичный двигатель (в лаборатории обычно асинхронный двигатель), генератор постоянного тока независимого возбуждения (Г), регулируемый рабочий двигатель постоянного тока независимого возбуждения (Д). В качестве нагрузки для рабочего двигателя используют или генератор постоянного тока, который в свою очередь загружается ламповым реостатом, или тормоз (электромагнитный или ленточный). Питание обмоток возбуждения генератора Г, двигателя Д и нагрузочного генератора (НГ) осуществляется от сети постоянного тока или отдельного генератора–возбудителя.
Достоинством системы «Г–Д» является следующее: облегченный безреостатный запуск; регулирование частоты вращения в широком диапазоне; плавное торможение и удобное реверсирование двигателя. При этом управление режимами в главной цепи системы «Г–Д» легко и просто осуществляется изменением небольших токов в цепях возбуждения без какой-либо переключающей аппаратуры.
Пуск двигателя Д системы «Г–Д» осуществляется путем постепенного увеличения тока возбуждения генератора с помощью потенциометра Rг. Причем при пуске напряжение на зажимах генератора следует увеличивать так, чтобы ток в цепи якоря двигателя Д не превышал номинальный более чем в два раза. Ток возбуждения двигателя Д при пуске устанавливать максимальным (Rд = 0).
Реверсирование рабочего двигателя Д производится путем изменения полярности на зажимах генератора при помощи переключателя П1, который изменяет направление тока в обмотке возбуждения генератора (ОВГ).
Регулирование частоты вращения двигателя Д, причем плавное и в широких пределах, осуществляется или за счет изменения напряжения на зажимах генератора Г путем регулирования тока в ОВГ (в пределах 8¸1), или за счет изменения тока возбуждения самого двигателя Д (в пределах 2¸1). Таким образом, общий предел регулирования частоты вращения двигателя в системе «Г–Д» составляет примерно 16¸1.
Применение же в качестве генератора электромашинных усилителей позволяет расширить диапазон регулирования скорости двигателя до 120¸1.
Свойства двигателя оцениваются механической характеристикой, уравнение которой имеет следующий вид:
n =  . (2)
. (2)
В системе «Г–Д» U = Eг – IаRа; Rа = Rа + Rад; Ф = Фд.
Тогда соответственно уравнения скоростной и механической характеристик приобретают следующий вид:
n =  ; (1′)
; (1′)
n =  –
–  М, (2′)
М, (2′)
где М – вращающий момент двигателя Д, кгм, (М = М2 + М0); М2 – полезный момент на валу; М0 – момент от потерь мощности в двигателе; Rаг, Rаг – соответственно сопротивления обмоток якоря, дополнительных полюсов и щеточных контактов генератора и двигателя, Ом; Км  – постоянный коэффициент для данного двигателя по моменту; Фд – результирующий магнитный поток двигателя, Вб.
– постоянный коэффициент для данного двигателя по моменту; Фд – результирующий магнитный поток двигателя, Вб.
Механические характеристики системы «Г–Д» при различных способах регулирования приведены на рис. 26.2.
Механические характеристики при различных напряжениях генератора является прямыми линиями, параллельными друг другу, причем чем меньше Ег, тем ниже расположены характеристики. При изменении же магнитного потока Фд механические характеристики располагаются выше естественной характеристики, так как при уменьшении потока частота вращения двигателя возрастает.

Рис. 26.2. Механические характеристики двигателя
Проанализируем кратко переходные процессы в системе «Г–Д». При постоянной скорости вращения n = const эдс генератора однозначно определяется величиной магнитного потока Фг, т. е.
 . (3)
. (3)
Вращающийся момент двигателя выразится
 , (4)
, (4)
а величина тока в якорной цепи генератор–двигатель определится из соотношения
I =  . (5)
. (5)
Основное уравнение движения электропривода имеет вид
М – Мс =  , (6)
, (6)
где Мс – статический момент сопротивления на валу двигателя;  – динамический момент, развиваемый двигателем, здесь
– динамический момент, развиваемый двигателем, здесь  – маховый момент, приведенный к валу двигателя. Для установившегося режима работы М – Мс = 0, т.е. Мд = 0.
– маховый момент, приведенный к валу двигателя. Для установившегося режима работы М – Мс = 0, т.е. Мд = 0.
При изменении Ег, например увеличении за счет тока в обмотке возбуждения, увеличится и ток в якоре двигателя согласно выражения (5), что приведет к соответствующему росту вращающего момента (4).
Равновесие между М и Мс [уравнение (6)] нарушается, и появляется положительный динамический момент, который начинает увеличивать частоту вращения двигателя. Однако с ростом частоты вращения двигателя увеличивается эдс Ед, что вызывает к уменьшению тока якоря (5) и момента двигателя до прежних значений в соответствии с величиной М. Это приводит к установлению равновесия между вращающим и статическим моментами (М = Мс) при повышенной установившейся частоте вращения.
Следует отметить, что если эдс Ег быстро уменьшать, то она может стать по величине меньше, чем Ед и ток Iа изменит свой знак [см. выражение (5)]. Это указывает на то, что двигатель перешел в генераторный режим, а генератор – в двигательный (тормозной режим системы «Г–Д»).
При регулировании тока возбуждения двигателя изменяются Фд и Ед. Например, уменьшение Фд и Ед приводит к увеличению Iа согласно выражению (5), что увеличивает момент двигателя М (4), а поэтому на основании уравнения движения электропривода (6) возрастет и скорость двигателя nд. Но с ростом частоты вращения увеличится Ед, а следовательно уменьшатся Iа и М. Поэтому рост частоты вращения прекращается, т. е. она достигает нового (более высокого) установившегося значения, при котором М = Мс.
Рассмотрим переходной режим при изменении нагрузки. Например при увеличении Мс скорость nд станет снижаться, что приведет к увеличению тока Iа, и вращающего момента М.
Снижение частоты вращения прекратится, когда момент вращения двигателя станет равным новому моменту сопротивления (М = Мс;  =0).
=0).
Благодаря преимуществам, которыми обладает система «Г–Д» в отношении плавности и диапазона регулирования частоты вращения и сохранения достаточной жесткости характеристик, она находит в настоящее время широкое применение в металлургической промышленности для привода мощных прокатных станов, метало-обрабатывающей и бумажной промышленности, подъемных устройствах, экскаваторах, мощных тракторах, тепловозах, морских судах и других установках.
Порядок выполнения работы
1. Ознакомиться с машинами, входящими в систему «Г–Д». Записать технические данные машин «с паспортов» и измерительных приборов.
2. Собрать схему проведения опытов (см. рис. 26.1).
3. Запустить двигатель, для этого:
а) предварительно установить ползунки потенциометра Rг и реостата Rд в положение выведенного сопротивления, т. е. так, чтобы ток возбуждения генератора был равен нулю, а ток возбуждения двигателя был максимальным. Переключатель П1 поставить в положение «вперед»;
б) запустить асинхронный двигатель (АД) с генератором. Подать напряжение в сеть возбуждения всех машин. Это осуществляется включением соответствующих пускателей нажатием кнопки «пуск»;
в) постепенно увеличивая ток возбуждения генератора Г с помощью потенциометра Rг, запустить двигатель Д. Запуск следует производить плавно, ток якоря не должен превышать при этом 2 Iан.
Выключение двигателя и всей системы Г-Д производится в обратном порядке.
4. Снять регулировочные характеристики рабочего двигателя Д: nд = f(Iвг); nд = f(Iвд).
Опыт производится следующим образом, Предварительно двигатель нагружается с помощью ленточного тормоза. Затем запускается двигатель Д. Характеристику nд = f(Iвг) снимают путем изменения тока возбуждения потенциометром Rг. Характеристика nд = f(Iвд) снимается при
Iвг =const путем регулирования (уменьшения) тока возбуждения двигателя Iвд изменением сопротивления Rд. Частота вращения двигателя фиксируется с помощью тахометра. Данные опытов записываются в табл. 26.1.
По данным опытов построить регулировочные характеристики двигателя.
Таблица 26.1
Опытные данные регулировочных характеристик
| № п/п | nд = f(Iвг) | nд = f(Iвд) | |||||
| Uд, В | Iвг, А | nд, об/мин | Примечание | Iвд, А | n, об/мин | Примечание | |
| 1. 2. 3. и т.д. | Iвд = const = =……….А | Uдо =…..В Iв = const = =………А |
5. Снять механические характеристики рабочего двигателя при различных способах регулирования:
а) при регулировании напряжением nд = f(М).
Опыт производится в следующем порядке. Запустить двигатель без нагрузки. При помощи потенциометра Rг установить при холостом ходе напряжение генератора, равное номинальному напряжению двигателя Uдн. Затем последовательно нагружать двигатель, включая ламповый реостат нагрузочного генератора и записывая данные опыта в табл. 26.2. Полученные данные относятся к естественной механической характеристике. Опыт следует повторить при Uд = 0,75 Uдн; Uд = 0,5 Uдн. Полученные данные позволят построить искусственные механические характеристики при изменении Uд. Ток возбуждения двигателя при этом следует установить равный номинальному;
б) при ослаблении магнитного потока Фд, т. е. nд = f(М).
Снимать эти характеристики следует при Uго = Uгн (Iвг = const) путем нагрузки двигателя. Опыт провести дважды при токах возбуждения двигателя меньше номинального. Результаты занести в табл. 26.2 и по опытным и расчетным данным построить искусственные механические характеристики при регулировании частоты вращения ослаблением магнитного потока двигателя Фд.
Таблица 26.2
Опытные данные механических характеристик
| № п/п | Измерения | Вычислено | Примечание | ||||||
| Uд, В | Iвг, А | Uнг, В | Iнг, А | nд, об/м | Pнг1, Вт | Pд2, Вт | M, кгм | ||
| Естественная характеристика Uдо = Uдн = ….В Iвд = Iвдн = ……………А | |||||||||
| Искусственная характеристика Uд = 0,75 Uдн ...В Iвд = Iвдн ……………..А | |||||||||
| Искусственная характеристика Uд = 0,5 Uдн .....В Iвд = Iвдн ……………..А | |||||||||
| Искусственная характеристика Uд = Uдн ..........В Iвд = 0,75 Iвдн …………А | |||||||||
| Искусственная характеристика Uд = Uдн ……...В Iвд = 0,5 Iвдн …………..А |
6. Произвести реверсирование и торможение рабочего двигателя Д.
Опыт проводится следующим образом. Не выключая асинхронного двигателя, потенциометром уменьшить ток возбуждения генератора Iвг до нуля и переключатель П1 установить в положение «назад», а затем, постепенно увеличивая ток возбуждения генератора, запустить двигатель Д.
Убедиться, что двигатель будет вращаться в противоположном направлении. После достижения номинального для двигателя напряжения следует достаточно быстро уменьшить ток возбуждения генератора до нуля, обеспечив тем самым переход двигателя в тормозной режим (двигатель Д переходит в режим генератора, а генератор Г – в режим двигателя, который будет вращать асинхронную машину, работающую в режиме генератора и возвращающую энергию торможения в сеть).
Удостовериться по приборам и ходу двигателя в осуществлении торможения. В отчете описать опыт реверсирования и торможения двигателя.
Расчетные формулы и пояснения к вычислениям, необходимым при оформлении отчета по работе.
1. Ра2 – полезная мощность на валу двигателя определится из выражения, Вт,
Ра2 =  ,
,
где Рнг2 = Uнг Iнг – полезная мощность нагрузочного генератора, Вт; ηнг – коэффициент полезного действия генератора, принимается равный 0,6; ηпер – коэффициент полезного действия передачи (ηпер = 1).
2. Вращающий момент М двигателя М = 0,975  , кгм, где Рд2 – мощность двигателя, Вт; nд – частота вращения двигателя, об/мин.
, кгм, где Рд2 – мощность двигателя, Вт; nд – частота вращения двигателя, об/мин.
На основании проведенных опытов и полученных результатов сформулировать выводы.
Рекомендуемая литература: [3, 6].
ЛАБОРАТОРНАЯ PАБОТА № 27
ИСПЫТАНИЕ СИНХРОННОГО ДВИГАТЕЛЯ
Цель работы: ознакомление с особенностями включения и работы синхронных двигателей путем снятия U-образных и рабочих характеристик.
Содержание работы
Синхронные двигатели имеют по сравнению с асинхронными большое преимущество, заключающееся в том, что, благодаря возбуждению постоянным током они могут работать с cosφ = 1, не потребляя при этом реактивной мощности из сети, а при работе с перевозбуждением – даже отдавать реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшаются падения напряжения и потери мощности в ней.
Максимальный момент синхронного двигателя пропорционален U, a у асинхронного двигателя – U2. Поэтому при понижении напряжения синхронный двигатель сохраняет большую нагрузочную способность.
Однако конструкция синхронных двигателей сложнее, чем короткозамкнутых асинхронных двигателей. Кроме того, синхронные двигатели должны иметь возбудитель или иное устройство для питания обмотки возбуждения постоянным током. Вследствие этого синхронные двигатели дороже асинхронных двигателей с короткозамкнутым ротором.
Тем не менее преимущество синхронных двигателей на
|
|
|

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!