2.1.1. Выбор канала управления
Технологические процессы и аппараты обогатительных фабрик представляют собой сложные системы, состояние которых в каждый момент времени характеризуется несколькими входными и выходными величинами. Значения выходных величин характеризуют состояние технологического процесса, это эффективность и качество продукта.
Каждая выходная величина зависит от нескольких входных величин (контролируемых и неконтролируемых). Влияние входных величин на выходные происходит по каналу передачи воздействия. Общее число их определяется числом контролируемых m и неконтролируемых n входных и выходных p величин и составляет (m + n) p. Из них выбирают необходимый канал регулирования на основании анализа влияния управляющих воздействий на управляемый параметр. От правильности выбора зависит эффективность функционирования системы автоматического регулирования (САР).
При выборе канала управления учитывают следующие положения:
1. В качестве регулируемой величины выбирается такой параметр, который имеет наибольшее технологическое значение для данного процесса.
2. Оцениваются возможности технической реализации контроля выбранной регулируемой величины на основе анализа существующих технических средств контроля, их точности и надежности. Если средств контроля данной величины нет или существующие средства контроля не удовлетворяют требуемой точности и надежности, то в качестве регулируемой выбирают другую выходную величину, которая тесно связана с первой и может использоваться для косвенного контроля основной величины.
3. В качестве управляющего воздействия выбирается входная контролируемая величина, степень влияния которой на выбранную управляемую величину наибольшая.
4. Оцениваются динамические свойства возможных каналов регулирования по их динамическим характеристикам. Предпочтение должно отдаваться регулирующему воздействию, транспортное запаздывание τ о и постоянная времени Т о которого наименьшие. Если имеется несколько каналов, близких по динамическим свойствам, предпочтение отдается каналу с меньшим отношением τ о/ Т о, а при равенстве τ о/ Т о – каналу с меньшими τ о и Т о.
5. Анализируется возможность технической реализации плавного изменения регулирующих воздействий, возможность установки регулирующих органов по всем рассматриваемым каналам регулирования. Оцениваются диапазоны изменения регулирующих воздействий, возможность осуществления автоматического контроля.
2.1.2. Выбор типа регулятора и типового переходного процесса
Тип регулятора ориентировочно выбирают по отношению запаздывания τ о к постоянной времени объекта Т о по каналу регулирования. Если τ о/ Т о < 0,2, то выбирают релейный регулятор. При 0,2 < τ о/ Т о < 1,0 выбирают непрерывный регулятор, а при τ о/ Т о > 1,0 – импульсный регулятор.
По сформулированным требованиям к качеству переходного процесса выбирают вид типового переходного процесса, удовлетворяющего этим требованиям: граничный апериодический, с 20 %-м перерегулированием или с минимальной квадратической площадью отклонения min ∫ y 2(t) dt.
Граничный апериодический процесс характеризуется минимальным временем регулирования, полным отсутствием перерегулирования и наибольшим динамическим отклонением регулируемой величины, минимальным изменением управляющего воздействия и Ψ = 0,95÷0,85.
Процесс с 20 %-м перерегулированием применим, когда допускается некоторое перерегулирование, позволяющее снизить максимальное динамическое отклонение. Время первого полупериода колебаний минимально и Ψ = 0,95÷0,85.
Процесс с минимальной квадратической площадью отклонения характеризуется наибольшим временем регулирования, 40 %-м перерегулированием, наименьшим максимальным динамическим отклонением, максимальным по регулированию воздействием и Ψ = 0,85÷0,75. Этот процесс выбирается, когда необходимо минимальное отклонение регулируемой величины даже при ухудшении других показателей качества регулирования.
2.1.3. Выбор закона регулирования
Первоначально производят предварительный выбор закона регулирования. При этом пользуются следующими положениями:
- И-регулятор применяется для автоматизации объектов со значительным самовыравниванием;
- П-, ПИ- и ПИД-регуляторы применяются для автоматизации любых объектов;
- И-, ПИ- и ПИД-регуляторы обеспечивают регулирование без статической ошибки (статическая ошибка не превышает зоны нечувствительности регулятора);
- И-регулятор допускает наибольшее максимальное динамическое отклонение регулируемой величины, П- и ПИ-регуляторы значительно его уменьшают, ПИД-регулятор обеспечивает минимальное динамическое отклонение регулируемой величины;
- П- и ПИД-регуляторы обеспечивают минимальное время регулирования, ПИ-регулятор увеличивает время регулирования примерно в 2 раза по сравнению с ПИД-регулятором, И-регулятор обеспечивает максимальное время регулирования.
Уточненный выбор закона регулирования производят, используя графические зависимости R д – τ о/ Т о (рис. 2.1). Выбирается закон, обеспечивающий при данном τ о/ Т о и выбранном типовом процессе регулирования необходимое значение коэффициента регулирования R д.
Проверяют, обеспечивает ли выбранный закон регулирования заданное время регулирования. Для этого используют графические зависимости t р/ τ о – τ о/ Т о (рис. 2.2). Если выбранный закон регулирования не обеспечивает необходимое время регулирования, применяют более сложный закон регулирования.
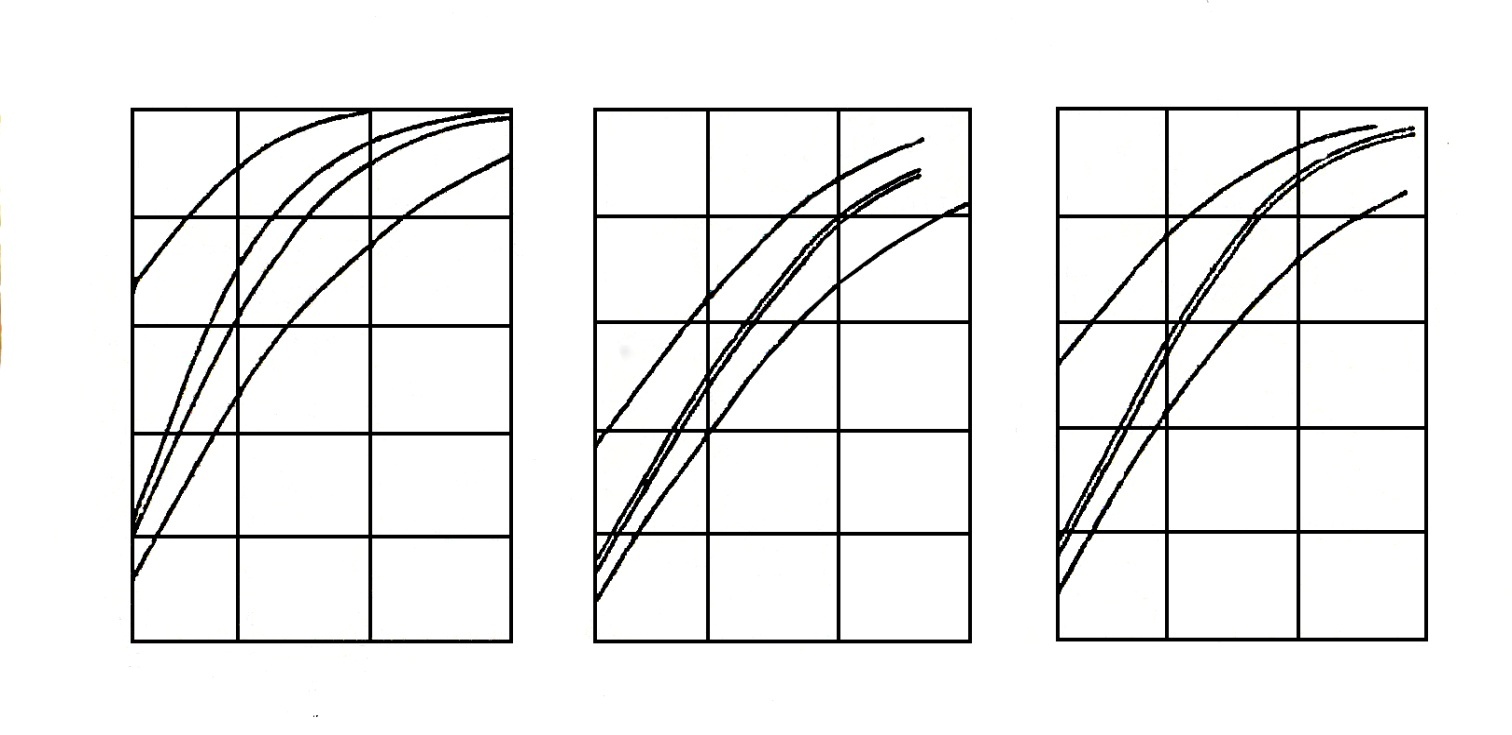
Рис. 2.1. Динамические коэффициенты регулирования
на статических объектах:
а – апериодический процесс; б – 20 %-ное перерегулирование;
в – процесс с min ∫ y 2(t) dt;
1 – И-регулятор; 2 – П-регулятор; 3 – ПИ-регулятор; 4 – ПИД-регулятор

Рис. 2.2. Графики времени регулирования для статических объектов:
а – апериодический процесс; б – 20 %-ное перерегулирование;
в – процесс с min ∫ y 2(t) dt;
1 – И-регулятор; 2 – П-регулятор; 3 – ПИ-регулятор; 4 – ПИД-регулятор
2.1.4. Выбор настроек регулятора
Приближенные значения настроек регулятора могут быть рассчитаны по формулам, приведенным в таблице 2.1.
Таблица 2.1






