Этот раздел посвящается реализации регуляторов повышенной надёжности [22, 25]. Повышение надёжности происходит не за счёт аппаратной части, а за счёт программной части (или алгоритмической). На рис. 22 приведена структура регулятора повышенной надёжности. Рассмотрим структуру САР в общем виде (рис. 23). Объект управления представим в виде звена первого порядка с запаздыванием. Входными каналами (параметрами) в регулятор являются:
1) F – контролируемое возмущение;
2) Z – задание регулятору.
U – сигнал регулирования (выходной сигнал); e – величина рассогласования.

Рис. 22. Типовая структура САР
Х – значение регулируемой величины (переменной); Wрег(p) – передаточная функция регулятора; Wоу(p) – передаточная функция объекта управления.
R(Z, Х, F) – закон регулирования; Коу – коэффициент усиления ОУ; Т – постоянная времени ОУ; t ‑ время запаздывания.
Перечислим основные ситуации, которые могут приводить к резкому изменению сигнала регулирования, то есть фактически к сбоям или отказам регулятора (рис. 25):
1) обрыв в измерительном канале регулируемой величины (Х) или в канале контролируемого возмущения (F);
2) выброс или провал значения Х или F;
3) некорректный ввод задания Z.

Рис. 23. Структура регулятора повышенной надёжности
C – команды переключения режимов; Крег – настройки регулятора; 1 – алгоритм защиты от некорректного ввода информации; 2Х – алгоритм проверки на достоверность по каналу обратной связи, то есть по каналу регулируемой величины Х; 2F – алгоритм проверки на достоверность по каналу контролируемого возмущения F; 3 – алгоритм контроля отработки управляющего воздействия; 4 – алгоритм контроля корректности задания настроек регулятору; 5 – структура исходного регулятора; 6 – регулятор повышенной надёжности (с алгоритмами контроля и защиты); D – дискретные выходы регулятора (режимы: включен, отключен, режим работы); U – сигнал регулирования; A – сигнализация нарушений и аварийных ситуаций при регулировании; Þ – двойной линией обозначается векторная величина.
Команды переключения режимов (С):
1) РУЧ – ручной режим. Положение исполнительного органа изменяется оператором вручную или по месту или дистанционно;
2) ДИСТ – дистанционный режим регулирования;
3) АВТ – автоматический режим регулирования;
4) КАСК – каскадный режим регулирования;
5) ВКЛ – включить регулятор. Это состояние автоматически формируется, если выбран один из режимов: АВТ, КАСК.
F – контролируемое возмущение; выбирается обычно наиболее важное, то есть которое в большей степени влияет на регулируемый параметр.
Крег – настройки регулятора: постоянная времени экспоненциального фильтра, зона нечувствительности, ограничения сигнала регулирования по минимуму и максимуму (могут формироваться автоматически в процессе регулирования), задание настроек ПИД-регулятора. Дополнительно могут вводиться значения погрешности измерительного канала, вероятная длительность выброса или отключения, обрыва параметра, максимальная систематическая погрешность измерительного канала.
Алгоритм проверки на достоверность входной информации определяет выбросы, обрывы и изменение динамики или «замирание» переменной. «Замирание» параметра следует контролируется по величине среднеквадратического разброса или взаимно корреляционным функциям.
Алгоритм контроля корректности задания или ввода настроек регулятора исключает ошибочные значения вводимых параметров.
Алгоритм контроля отработки управляющего воздействия контролирует, отрабатывает ли исполнительный механизм сигнал регулирования или нет.
Если по каким-либо причинам значение регулируемой переменной становится недостоверным, то автоматически формируется команда на переход регулятора в ручной режим.
Для уменьшения вероятности выработки ложных управляющих сигналов входная аналоговая информация должна проверяться на достоверность. Назовём этот алгоритм контроля информации блоком контроля или блоком защиты. После этого блока ложная информация не должна поступать в систему контроля и регулирования. Структура блока в общем виде представлена на рис. 24.

Рис. 24. Структура блока контроля информации
Х – аналоговый сигнал до блока защиты; Х1 – аналоговый сигнал после блока защиты.
Отказ – признак отказа данного канала. Под отказом понимается обрыв в измерительном канале.
Выброс или провал сигнала можно отнести к сбою измерительного канала.
На рис. 25 рассмотрены типовые ситуации по аналоговому каналу. Ситуация I соответствует обрыву в измерительном канале.

Рис. 25. Графическая иллюстрация работы блока защиты
Значение параметра после обрыва становится меньше нуля, если стандартный токовый сигнал после преобразователя изменяется в диапазоне от 4 до 20 mA. Если же токовый сигнал изменяется от 0 до 5 mA или от 0 до 20 mA, то после обрыва измерительной линии на цифровом индикаторе контроллера появится сигнал, близкий к нулю. Не равенство этого сигнала нулю объясняется смещением нуля АЦП. В нашем случае, в лаборатории автоматизации смещение нуля составляет примерно 0,6 или 0,7, то есть меньше единицы. Ситуация I – обрыв в измерительном канале. Ситуация II представляет случайный выброс. Ситуация III представляет случайный провал сигнала. Значение А является допустимым изменением параметра по данному каналу за время Dt3. Усложнённый вариант алгоритма контроля учитывает и «замирание» сигнала. Под «замиранием» сигнала понимается такое значение параметра, которое находится в рабочем интервале, но перестаёт отражать истинное значение технологического параметра. Замирание сигнала выявляется по уменьшению разброса значений относительно среднего значения сигнала. Разброс значений оценивают по среднеквадратическому отклонению. В этом случае обычно изменяется и частотный спектр сигнала. Кроме того, наблюдается изменение коэффициента корреляции между связанными технологическим процессом параметрами [9, 12, 21, 25]. В программе 1 (рис. 26) и программе 2 (рис. 27) ситуация «замирания» не выявляется.
Вернёмся к нашему регулятору. В качестве блока 2F можно взять одноканальный блок проверки на достоверность. Алгоритм проводит анализ всех трёх ситуаций, изображённых на рис. 25. Допустим, что переменную Х контролируют три или два датчика. Поэтому в качестве блока проверки на достоверность по каналу регулируемой переменной можно взять алгоритм интеллектуальный мажоритарного выбора два из трех или алгоритм выбора исправного канала из двух.
В программе 1 (Cobriv, рис. 26) реализована защита от обрыва, выброса или провала входного параметра. Эти ситуации будем трактовать как отказ канала. Обрыв распознаётся (отказ) по значению параметра, когда оно меньше единицы. Анализ обрыва осуществляется алгоритмом порогового контроля (ПОР), расположенным в алгоблоке 12. Выброс или провал отнесём к сбою канала, который распознаётся в алгоблоках 7, 8, 9, 10, 13 и 15. Отказ канала фиксируется триггером, расположенным в алгоблоке 19. В контроллере постоянно, через заданный временной интервал, определяемый длительностью импульса мультивибратора с малым периодом (алгоблок 6), определяется разность значений контролируемого параметра. По переднему фронту сигнала с мультивибратора запоминается значение параметра. Обозначим его через Xi–1. По заднему фронту (то есть через время равное длительности импульса) запоминается следующее значение параметра, обозначим его через Xi. Длительность импульса должна быть больше или равна времени цикла контроллера. Если текущее значение параметра незначительно отличается от предыдущего (ïXi1 – Xi ï < A), то текущее значение параметра передаётся на выход блока, то есть происходит перезапись. На выходе алгоблока 20 (20/2) хранится значение параметра после блока защиты. Один мультивибратор (алгоблок 06) с малым периодом служит для выявления выбросов или провалов параметра. А мультивибратор (алгоблок 11) с большим периодом формирует команду для перезаписи значения параметра на выход блока. Если триггер зафиксировал отказ канала, то сигнал с триггера поступает на вход «Сброс» мультивибратора (алгоблок 11), и перезапись прекращается. В случае сбоя или отказа канала на выходе алгоблока 20 сохраняется предыдущее достоверное значение сигнала на время отказа канала. В программе 1 (рис. 26) обрыв распознаётся только по абсолютному значению параметра, близкому к нулю[17]. Но это может быть не обрыв, а нулевое значение параметра. Поэтому для повышения надёжности распознавания обрыва в следующей программе 2 (рис. 27) постоянно контролируется скорость изменения значения параметра с помощью алгоритма контроля скорости изменения параметра (ОГС). Обрыв фиксируется по двум признакам: резкому уменьшению скорости параметра и принятию им в этот момент значения, близкого к нулю. Значение параметра становится близким к нулю в том случае, если токовый сигнал, который поступает на клеммно-блочный соединитель (КБС-3), имеет диапазон изменения от 0 до 5 mA или от 0 до 20 mA. Если токовый сигнал изменяется от 4 до 20 mA, то при обрыве линии получим значение параметра меньше нуля (идеально должен быть минус 25, реально имеем значение примерно минус 15 или другое отрицательное значение).
В программах 1 и 2 используются следующие алгоритмы: ВАА – ввод аналоговых сигналов (в данном случае одного Х); МУВ – мультивибратор; ПОР – алгоритм порогового контроля; ЗПМ – алгоритм запоминания сигнала по переднему фронту; СУМ – сумматор; ТМР – таймер; ЛОИ – двухвходовой элемент И; МОД – модуль (в нашем случае берётся абсолютная величина разности сигналов ½Xi–1 – Xi½); ОКЛ – оперативный контроль информации на ЛП логической модели. В пороговом алгоритме установлен порог равный 5, то есть А = 5 (рис. 26). Пороговое значение на обрыв в алгоблоке 12 установили равным единице. Считается, что в основном сигнал больше единицы. Смещение АЦП, как уже указывалось, меньше единицы.
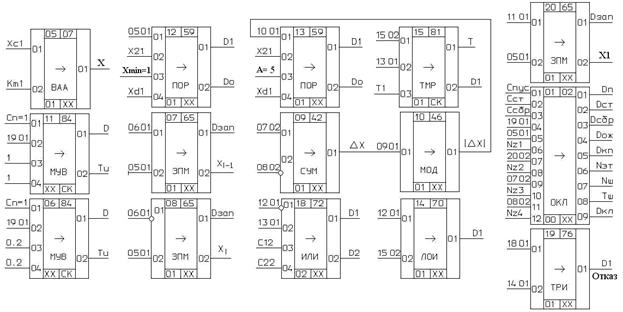
Рис. 26. Программа 1 защиты от обрыва, выброса или провала сигнала
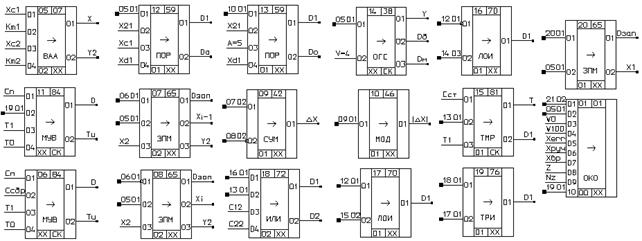
Рис. 27. Программа 2 защиты от обрыва, выброса или провала сигнала
Отображение информации программой 1 на ЛП логической модели контроллера приведено в табл. 9. Студентам следует обратить на приводимые таблицы и применять их в своих работах.
Таблица 9
| Номер входа
| Цифровой индикатор
| Шифр входа
| Шкала
| Наименование
|
|
| Первый прямоугольный индикатор ЛП
| Nоп
|
| Произошел отказ или сбой канала.
|
|
| ЦИ
| Z1
| 0-100
| Значение сигнала до блока защиты.
|
|
| ЦИ
| Z2
| 0-100
| Последнее запомненное значение сигнала, то есть после блока защиты.
|
|
| ЦИ
| Z3
| 0-100
| Значение сигнала в предыдущий момент времени (Xi–1)
|
|
| ЦИ
| Z4
| 0-100
| Значение сигнала в текущий момент времени (Xi)
|
8.1. Конфигурационная таблица программы 1
Программу 1 можно представить в табличном виде. Эта таблица называется конфигурационной. В конфигурационной таблице указываются все настройки: пороговые значения, временные настройки. Например, в алгоритме МУВ указываются длительность импульса и длительность паузы. Фактически это представление той же программы в табличном виде, что менее наглядно, но более информативно.
Имя программы: Cobriv.rem
Дата создания отчета: 25/04/2010(СДБ).
СИСТЕМНЫЕ ПАРАМЕТРЫ:
Системный номер контроллера: 2.
Модель контроллера: Регулирующая.
Комплектность УСО группы А: 8 ан. вх. и 2 ан. вых. (1).
Комплектность УСО группы Б: 8 д. вх. и 8 д. вых. (5).
Временной диапазон контроллера: Младший (Сек/Мин).
Время цикла: 0,2 сек.
Инвентарный номер контроллера[18].
В таблице 10 оставлены стандартные обозначения, которые формируются автоматически кросс-средством Редитор Р-130. Поэтому лучше ориентироваться на обозначения в программе (рис. 26).
АЛГОРИТМЫ И КОНФИГУРАЦИЯ:
Таблица 10
| Ал. б.
| Алгоритм
| Мод
| Вход
| Значение
| Источник
|
| | | | N Имя
| | Ал. б. / Выход
|
|
| ОКО (01)
|
|
|
|
|
|
|
|
| 1 Xздн
|
| 20 2 (Y1)
|
|
|
|
| 2 Xвх
|
| 5 1 (Y1)
|
|
|
|
| 3 W0
|
|
|
Продолжение таблицы 10
|
|
|
| 4 W100
|
|
|
|
|
|
| 5 Xerr
|
|
|
|
|
|
| 6 Xруч
|
|
|
|
|
|
| 7 Xвр
|
|
|
|
|
|
| 8 Z
|
|
|
|
|
|
| 9 Nz
|
|
|
|
|
|
| 10 Nок
|
| 19 1 (D1)
|
|
| ВАА (07)
|
|
|
|
|
|
|
|
| 1 Xc1
|
|
|
|
|
|
| 2 Km1
|
|
|
|
| МУВ (84)
| –
|
|
|
|
|
|
|
| 1 Сп
|
|
|
|
|
|
| 2 Ссбр
|
| 19 1 (D1)
|
|
|
|
| 3 T1
| 0,2
|
|
|
|
|
| 4 T0
| 0,2
|
|
|
| ЗПМ (65)
|
|
|
|
|
|
|
|
| 1 Cзап
|
| 6 1 (D)
|
|
|
|
| 2 X1
|
| 5 1 (Y1)
|
|
| ЗПМ (65)
|
|
|
|
|
|
|
|
| 1 Cзап
|
| 6 1 (D)
|
|
|
|
| 2 X1
|
| 5 1 (Y1)
|
|
| СУМ (42)
|
|
|
|
|
|
|
|
| 1 Xo
|
| 7 2 (Y1)
|
|
|
|
| 2 X1
| инверсия
| 8 2 (Y1)
|
|
| МОД (46)
|
| 1 X1
|
| 9 1(Y)
|
|
| МУВ (84)
| –
|
|
|
|
|
|
|
| 1 Сп
|
|
|
|
|
|
| 2 Ссбр
|
| 19 1 (D1)
|
|
|
|
| 3 T1
|
|
|
|
|
|
| 4 T0
|
|
|
|
| ПОР (59)
|
|
|
|
|
|
|
|
| 1 X11
|
| 5 1 (Y1)
|
|
|
|
| 2 X21
|
|
|
|
|
|
| 3 Xс1
|
|
|
|
|
|
| 4 Xd1
|
|
|
|
| ПОР (59)
|
|
|
|
|
|
|
|
| 1 X11
|
| 10 1 (Y1)
|
|
|
|
| 2 X21
|
|
|
|
|
|
| 3 Xс1
|
|
|
|
|
|
| 4 Xd1
|
|
|
|
| ЛОИ (70)
|
|
|
|
|
|
|
|
| 1 C11
|
| 12 1 (D1)
|
|
|
|
| 2 C21
|
| 15 2 (D1)
|
|
| ТМР (81)
|
|
|
|
|
|
|
|
| 1 Сст
|
| 15 2 (D1)
|
|
|
|
| 2 Ссбр
|
| 13 1 (D1)
|
|
|
|
| 3 T1
|
|
|
Окончание таблицы 10
|
| ДВБ (14)
|
| 1 C1
|
| 19 1 (D1)
|
|
| ИЛИ (72)
|
|
|
|
|
|
|
|
| 1 C11
| инверсия
| 12 1 (D1)
|
|
|
|
| 2 С21
|
| 13 1 (D1)
|
|
| ТРИ (76)
|
|
|
|
|
|
|
|
| 1 Cs1
|
| 18 1 (D1)
|
|
|
|
| 2 Cr1
|
| 14 1 (D1)
|
|
| ЗПМ (65)
|
| 1 Cзап
|
| 11 1 (D)
|
|
|
|
| 2 X1
|
| 5 1 (Y1)
|






