 Свободное тело имеет шесть степеней свободы (рис. 1.2). Его произвольное перемещение в пространстве можно представить, как результат сложения шести независимых перемещений: 3-х поступательных, параллельных осям координат, и 3-х вращательных вокруг осей, параллельных этим осям.
Свободное тело имеет шесть степеней свободы (рис. 1.2). Его произвольное перемещение в пространстве можно представить, как результат сложения шести независимых перемещений: 3-х поступательных, параллельных осям координат, и 3-х вращательных вокруг осей, параллельных этим осям.
В зависимости от вида соединений звеньев механизма одно из них может совершать относительно другого одно, два, три, четыре или пять движений из шести перечисленных ранее. Следовательно, кинематические пары накладывают на относительные движения звеньев определённые ограничения, которые зависят от способа их соединения. Такие ограничения называются связями.
Число связей S, ограничивающих относительные движения звеньев, определяются равенством
 ,
,
где W – число степеней свободы звеньев, образующих кинематическую пару.
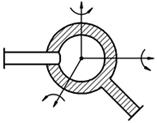
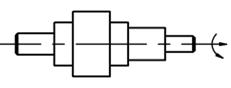
Академиком И.И. Артоболевским введена классификация кинематических пар, согласно которой все пары делятся на 5 классов в зависимости от числа S, которые принято обозначать римскими цифрами. В таблице 1 показано разделение кинематических пар по классам и приводятся условные изображения кинематических пар. Стрелками отмечены возможные перемещения звеньев, которые сохраняются после образования пары.
Таблица 1
Схематическое и условное изображение кинематических пар
| Схематическое изображение кинематической пары
| Условное изображение
| S
| W
| Класс кинематической пары
|
 Шарнаплоскости
Шарнаплоскости
| 
|
|
| I
|
 Цилиндр на плоскости
Цилиндр на плоскости
| 
|
|
| II
|
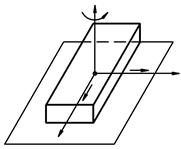 Призма на плоскости
Призма на плоскости
| 
|
|
| III
|
 Сферическая
Сферическая
| 
|
|
| III
|
| Схематическое изображение кинематической пары
| Условное изображение
| S
| W
| Класс кинематической пары
|
 Сферическая с пальцем
Сферическая с пальцем
| 
|
|
| IV
|
 Цилиндрическая
Цилиндрическая
| 
|
|
| IV
|
 Вращательная
Вращательная
| 
|
|
| V
|
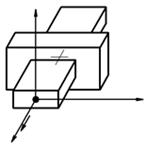 Поступательное
Поступательное
| 
|
|
| V
|
 Винтовая
Винтовая
| 
|
|
| V
|
В зависимости от вида составляющих их элементов кинематические пары разделяют на высшие и низшие. К низшим кинематическим парам, элементами которых являются поверхности, относятся пары: поступательная, вращательная, сферическая, винтовая и плоскостная. Точки и линии – элементы высших кинематических пар, к которым относятся пары «шар на плоскости» и «цилиндр на плоскости». Преимуществом низших пар является способность передавать значительные усилия при меньшем износе по сравнению с высшими парами. Преимущество высших пар заключается в возможности воспроизводить с их помощью достаточно сложные относительные движения.
Кинематические цепи
Кинематической цепью называется совокупность звеньев, соединенных в кинематические пары. Кинематические цепи подразделяются на простые, сложные, замкнутые, незамкнутые.
Простой кинематической цепью называется такая цепь, у которой каждое звено входит не более чем в две кинематические пары (рис. 1.3). Кривошипно-шатунный механизм состоит из неподвижного звена – стойки и трех подвижных звеньев – 1, 2, 3. Кинематическими парами данного механизма будут 0-1, 1-2, 2-3, 3-0. Каждое звено входит в две кинематические пары, следовательно – это простая кинематическая цепь.

Рис. 1.3. Кинематическая схема кривошипно-шатунного механизма
Сложной называется такая кинематическая цепь, у которой хотя бы одно звено входит более чем в две кинематические пары (рис. 1.1). В данном механизме звено 2 входит в следующие кинематические пары: 1-2, 2-3, 2-4.
Замкнутой кинематической цепью называется цепь, каждое звено которой входит, по крайней мере, в две кинематические пары (рис. 1.1, 1.3).
Незамкнутой называется кинематическая цепь, у которой есть звенья, входящие только в одну кинематическую пару. На рис. 1.4 звено 5 входит только в одну кинематическую пару: 4-5.

Рис. 1.4. Кинематическая схема манипулятора
Кинематическая схема механизма дает полное представление о структуре механизма и определяет его кинематические свойства. Она выполняется графическим способом с использованием условных обозначений звеньев, кинематических пар и указанием размеров, которые необходимы для кинематического анализа механизма.
На кинематических схемах механизмов звенья изображаются отрезками прямых и нумеруются арабскими цифрами. Кинематические пары обозначаются заглавными буквами латинского алфавита и схематически изображаются так, как показано на рис. 1.3, 1.4.
Для проектируемого механизма необходимо знать какое количество звеньев, связанных со стойкой, должно быть ведущим для того, чтобы движение механизма было вполне определенным. Для этого вычисляют число степеней свободы W механизма относительно стойки, которое показывает количество ведущих звеньев. Большинство механизмов, используемых в технике, имеют число степеней свободы, равное единице и, следовательно, должны иметь одно ведущее звено.






