Одной из причин вибрации различных машин является неуравновешенность (дисбаланс) вращающихся деталей (узлов), установленных в подшипниках. Под неуравновешенностью детали понимается такое положение, когда центр тяжести детали (центр масс) не совпадает с геометрической осью её вращения. При вращении такой детали возникает центробежная сила, которая в конечном виде и является причиной вибрации, а, следовательно, и преждевременного износа машин в целом. Произведение силы тяжести детали на величину смещения центра масс от оси вращения носит название дисбаланса:
Д = Р ∙ е; (1)
где Д – дисбаланс, Н∙м;
Р – вес детали, Н;
е – смещение центра тяжести детали от оси вращения, м.
Неуравновешенность детали вращения появляется вследствие неравномерного износа ее в процессе эксплуатации. в результате неправильной сборки и по другим причинам. Способ устранения неуравновешенности детали носит название балансировки. Таким образом, балансировкой достигается устранение дисбаланса.
Балансировка бывает двух видов: статическая и динамическая.
Статическая балансировка производится с помощью несложных приспособлений на не вращающейся детали. Динамическая балансировка производится на специальных балансировочных станках во время вращения детали. Выбор способа балансировки зависит от отношения длины детали к её диаметру L/D иот частоты вращения детали n.
На рисунке 1 представлен график для определения границ статической и динамической балансировки в зависимости от L /D и n. Область I с малыми значениями L/D и п. соответствует статической балансировке. Область III, отвечающая большим значениям L/D и п, является областью динамической балансировки. Область II может быть зоной как статической, так и динамической балансировки, для неответственных деталей в промежуточной области II применяется статическая балансировка, а для ответственных – динамическая.

I – область статической балансировки; II – промежуточная область;
III – область динамической балансировки
Рисунок 1 – Границы статической и динамической балансировки
СУТЬ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ
На горизонтальную плоскость установим статически неуравновешенный ротор. Он начнет катиться по плоскости, затем остановится, заняв устойчивое положение. Движение ротора происходит под действием момента сил тяжести. Значение момента сил тяжести относительно оси проходящей через точку 01 (рис. 2) перпендикулярно плоскости рисунка, равно произведению силы тяжести Р на плечо h.
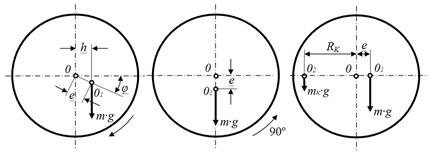
Рисунок 2 – К статической балансировке ротора
Таким образом, момент силы тяжести определяется как:
 (2)
(2)
Момент действует до тех пор, пока точка 01 не переместится вниз. В устойчивом положении момент силы тяжести равен нулю, т. к. сosφ = 0. Нижняя точка показывает угол дисбаланса в системе координат, связанной с ротором, или, как говорят, с “тяжелым местом” ротора.
Чтобы сбалансировать ротор, его необходимо повернуть на 900 и привести тяжелое место 01 в горизонтальную плоскость. В противоположной точке 02 на радиусе 002 = RK необходимо установить корректирующую массу mк, создающую момент, равный моменту силы тяжести тк ∙ g ∙ RK = R ∙ m ∙ g. Добившись безразличного равновесия, получим значение момента дисбаланса ротора:

 (3)
(3)
Зная массу ротора т, определив опытным путем массу, корректирующую тк и зная радиус приложения этой массы Rк можно вычислить одну из главных характеристик дисбаланса «е» по формуле:
 . (4)
. (4)
Обычно е выражают в мкм.
Располагая данными выражения (4), можно технически решить задачу устранения дисбаланса: или к ротору прикрепить (приварить, приклепать, привернуть) деталь массой тк на расстоянии RK от центра, или на другом, более удобном, месте с новым радиусом прикрепить новую корректирующую массу, или, наконец, в "тяжелом" месте по направлению оси 001 удалить лишнюю массу (высверлить, сострогать, сфрезеровать и т. п.) опять-таки соблюдая равенство (4). Таким путем, удаляя массу в тяжелом месте, достигается сведение эксцентриситета "е" к нулю, перемещения центра тяжести ротора 01 в центр вращения 0.
Такой способ балансировки носит название – метод подбора корректирующей массы.
Другой метод, широко используемый в балансировочной технике, называется – метод кругового обхода.
Суть его сводится к следующему.
Окружность ротора в плоскости коррекции делят на восемь равных частей и наносят меловые отметки 1, 2, 3, … 8. Ротор устанавливают на балансировочном устройстве так, чтобы метка 1 находилась в горизонтальной плоскости (рис. 3).
В точке 1 подбирают массу т1, которая поворачивает ротор на угол 45° и приводит в горизонтальную плоскость точку 2. Первую массу снимают и взвешивают. В точке 2 подбирают новую массу т2, вызывающую поворот ротора также на 45°, и так для всех точек.
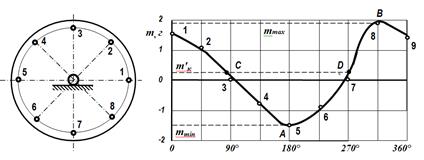
Рисунок 3 – Графическое определение второй корректирующей массы
В точке 1 подбирают массу т1, которая поворачивает ротор на угол 45° и приводит в горизонтальную плоскость точку 2. Первую массу снимают и взвешивают. В точке 2 подбирают новую массу т2, вызывающую поворот ротора также на 45°, и так для всех точек. При каждом повороте ротора по часовой стрелке корректирующую массу записывают со знаком «+», а против часовой со знаком «–». В результате получают значение неуравновешенных масс т1, т2, m3... т8, поворачивающих ротор на один и тот же угол.
Значение и угол размещения корректирующей массы находят графическим способом. Для этого строят график (рис. 3). По оси абсцисс откладывают угол постановки (или номер метки) неуравновешенной массы, а по оси ординат – значение неуравновешенной массы. Полученные точки соединяют плавной кривой, подобной синусоиде. На кривой находят точки А и В, соответствующие минимальному тmin и максимальному mmax значению неуравновешенной массы. Величина корректирующей массы т'к определится как:
т'к = 1/ 2(mmax + тmin) (5)
Место расположения корректирующей массы определится точками пересечения линии т'к с кривой (точки С и D на рис. 3).
Метод кругового обхода применяют для определения дисбаланса роторов, находящихся в безразличном состоянии равновесия при любом угловом положении. Такое состояние наблюдается как у несбалансированных роторов, так и у роторов после статической балансировки методом подбора корректирующей массы.
ЭКСПЕРИМЕНТАЛЬНАЯ УСТАНОВКА
Ротор, подлежащий балансировке, представляет собой диск 5, установленный на вал 4 (рисунок 4).

1 – стол; 2 – рама; 3 – вал; 4 – ротор; 5 – штифт; 6 – сменные пластинки грузики (корректирующие массы); 7 – направляющие; 8 – упоры
Рисунок 4 – Схема экспериментальной установки
Балансировочное приспособление состоит из двух направляющих уголков 7, закрепленных на раме 2, состоящей из двух швеллеров, закрепленных столе 1, который устанавливается в строго горизонтальном положении (отвесы на рис. 4 не показаны). По внутреннему периметру ротора 4 под углом 45 °, расположены отверстия с резьбой, в которые вворачиваются штифты 5, на которые навешиваются пластинки-грузики, служащие корректирующей массой. Вал 3 с установленным на нем ротором 4 свободно лежит на направляющих 7 и может по ним перекатываться в обе стороны до упоров 8. Перпендикулярность вала ротора относительно направляющих обеспечивается аккуратным откатыванием его от упоров.





