Способ определения места по двум разновременным пеленгам одного предмета называют способом крюйс-пеленга.
Находясь по счислению в точке М 1 и следуя истинным курсом ИК (рис. 104), надо взять пеленг КПi ориентира А и одновременно снять отсчет лага OJh. Пройдя некоторое расстояние Sa, при котором направление на ориентир изменится на 45 — 105°, надо снова взять пеленг КП2 того же предмета и провести отсчет лага OJI2■ Исправив взятые пеленги общей поправкой компаса, проложим линии соответствующих истинных пеленгов HFIi и ИП2 на карте.
Пройденное расстояние S„ при этом будет равно разности (OJl2—OJIi) Ка- Если это расстояние, сохраняя его направление, вместить каким-либо способом между линиями проложенных на карте пеленгов, то точки Mi и М2 дадут место судна на моменты первого и второго наблюдений. Полученное место М2 (подобно полученному по разновременным пеленгам двух предметов) будет счислимо-об- сервованным (<р0-сч и Яо-сч) и обозначается на карте таким же знаком в виде треугольника. Для вмещения пройденного расстояния между линиями пеленгов расстояние 5Л снимают циркулем с карты и прикладывают циркуль к параллельной линейке, расположенной вдоль линии истинного курса на карте. Затем передвигают линейку с циркулем так, чтобы обе ножки циркуля уместились между линиями пеленгов. Отметка циркуля на линии второго пеленга даст место судна.
Один из способов, содержащих построение, состоит в следующем. Из точки А местонахождения предмета (рис. 105) проводят параллельно линии истинного курса прямую и на ней откладывают плавание S„. Из полученной точки А' проводят прямую, параллельную линии первого пеленга, пересечение которой с линией второго пеленга даст место судна.
| Рис. 104. Определение крюйс-пеленгу.
|
 Рис. 105. Получение места на карте при определении по крюйс-пеленгу.
Рис. 105. Получение места на карте при определении по крюйс-пеленгу.
|
Если имеется дрейф, то пройденное расстояние вмещают между
линиями пеленгов или проводят линию А А' параллельно линии лути судна, а не линии курса.
Если судно между взятиями пеленгов шло ломаным курсом, меняя его в счислимых точках Mi, М2, М3 (рис. 106), то прокладывают весь счислимый путь с расстояниями 5лЬ 5л2, S„3. Из счислимой точки на момент второго пеленгования (точка УИ4) проводят линию, параллельную линии первого пеленга. В точке пересечения ее с линией второго пеленга получают место судна.
Если поправка компаса неверна, то точность определения будет тем меньше, чем ближе при этом второй пеленг к траверзу. Влияние возможной ошибки в поправке лага из-за сравнительно небольшого расстояния, пройденного между моментами взятия пеленгов, невелико.
При наличии течения поступают следующим образом. Из точки Mi взятия первого пеленга (рис. 107) откладывают по
 Рис. 108. Крюйс-пеленг при траверз ном расстоянии.
Рис. 108. Крюйс-пеленг при траверз ном расстоянии.
|
линии истинного курса плавание по лагу Sn (участок A11AJ2). Из точки М2 откладывают по направлению течения расстояние М2М3, на которое судно будет снесено течением за время t между момен-
 Рис. 107. Определение места по крюйс-пеленгу на течении.
Рис. 107. Определение места по крюйс-пеленгу на течении.
|
тами взятия пеленгов, равное tVT. Проведя через точку М3 линию, параллельную линии первого п.еленга, в точке М4 пересечения ее с линией второго пеленга получают счислимо-обсервованное место судна на момент вторых наблюдений.
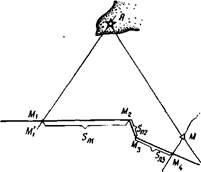 Рис. 106. Определение места по крюйс-пеленгу на ломаных курсах.
Рис. 106. Определение места по крюйс-пеленгу на ломаных курсах.
|
В способе крюйс-пеленга возможны частные случаи. Если пеленг второго предмета взят в момент его нахождения на траверзе (рис. 108), то треугольник MiAB будет прямоугольным и место
судна М будет находиться на линии траверза на расстоянии D от предмета, определяемого по формуле
D = SJltgq1-= кл (ОЛг — 0Лг) tg qlt






