

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...
Топ:
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Оснащения врачебно-сестринской бригады.
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Интересное:
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Особенностью данной системы является то, что она построена на основе двух самостоятельно существующих систем, таких как:
- спутниковая навигационная система;
- система сотовой подвижной радиосвязи GSM-стандарта.
Центральным элементом системы является автомобильный контроллер, который сочетает в себе элементы системы навигации, такие как GPS-приемник, антенна GPS, а также элементы и подсистемы сети сотовой подвижной радиосвязи. Схема проектируемого устройства имеет вид, показанный на рисунке 3.1.
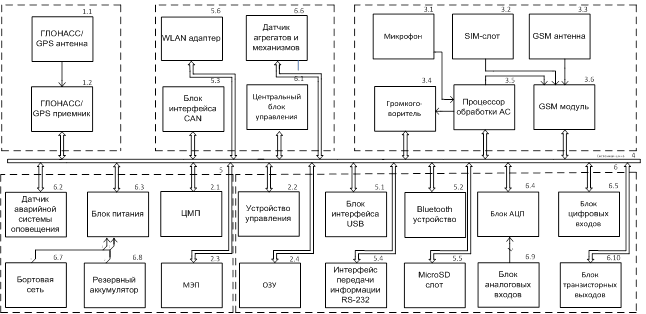
Рисунок 3.1 – Структурная схема автомобильного контроллера
Представленная схема данной системы состоит из следующих основных блоков:
GPS-модуль;
GSM-модуль;
центральный процессор;
модуль энергонезависимой FLASH-памяти;
модуль оперативной памяти;
подсистема питания;
блоки аналоговых и цифровых входов;
блок транзисторных выходов
порт USB;
RS 232 (COM- порт);
Bluetooth – устройство;
датчик аварийной системы оповещения (ДСО);
CAN-интерфейс для подключения к CAN-шине.
Рассмотрим назначение каждого блока подробнее.
GPS-модуль с помощью внешней активной GPS-антенны принимает кодовые сигналы со спутников системы GPS (NAVSTAR) и, с помощью внутреннего вычислителя, определяет географические координаты местоположения приемника, а также точное время, скорость и направление движения. Полученные данные по протоколу NMEA поступают с выхода GPS-модуля в блок центрального микропроцессора с периодичностью 1 раз в секунду.
В современном GPS приемнике применяется алгоритм, который автоматически синхронизирует процесс расшифровки в GPS приёмнике с процессом шифрования на спутнике. Он реализуется при помощи аппаратного коррелятора. Во время настройки на спутники процесс синхронизации GPS приёмника на множественные одновременные передачи с группы спутников корректирует небольшие относительные различия в синхронизации. Они связаны с расстоянием между спутниками и приёмником. Но даже если спутники будут передавать пакеты в одно время, расстояния до них разные, поэтому и задержка, через которую пакеты достигнут приёмника, тоже будет разная. Корреляторы позволяют синхронизировать разные коды C/A с передачей данных соответствующими спутниками. Задержка у каждого спутника будет своя, поэтому и относительное временное смещение кода C/A по сравнению с "системным" временем будет для каждого спутника своим.
|
|
GSM модуль служит для доступа контроллера в сеть сотовой связи GSM. Прием и передача GSM сигнала осуществляется через внешнюю GSM антенну. Идентификация контроллера в сети GSM, а также доступ к услугам и сервисам, предоставляемым оператором сотовой связи осуществляется с помощью SIM-карты, устанавливаемой в контроллер. GSM модуль выполняет несколько функций:
- обеспечивает доступ и идентификацию устройства в сети сотовой связи стандарта GSM с помощью SIM-карты;
- обеспечивает обмен данными (в т.ч. и передачу точек трека) между контроллером и сервером по протоколу TCP/IP через сеть Интернет с помощью услуги пакетной передачи данных GPRS;
- обеспечивает обмен информационными и управляющими SMS- сообщениями и USSD-запросами (например, для контроля состояния лицевого счета);
- осуществляет отправку исходящих и прием входящих звонков, обеспечивая услугу голосовой связи между водителем, диспетчером и другими абонентами;
- содержит блок голосового интерфейса с пользователем (вход/выход звука на гарнитуру "свободные руки" или на "громкую связь").
Модуль энергонезависимой памяти ПЗУ служит в качестве устройства хранения накопленных данных. Модуль ПЗУ должен обеспечить хранение данных в течение длительного времени (до 10 лет) даже в случае отключения питания устройства. Данный модуль в контроллере может быть построен по принципу кольцевого накопителя. Это означает, что при заполнении модуля памяти, каждая новая запись будет записываться на место наиболее старой записи на текущий момент, обеспечивая максимум актуальности хранимой информации.
|
|
Подсистема питания с цепями защиты формирует все необходимые напряжения питания составных частей контроллера. Основной вход питания позволяет работать в бортовой сети с напряжением питания от 12 до 24 вольт, что делает возможным использование контроллера совместно с подавляющим большинством транспортных средств без применения каких-либо дополнительных согласующих цепей. Кроме того, драйвер питания обеспечивает защиту контроллера от переполюсовки, перенапряжения, помех и т.д. Кроме того, в цепь питания на печатной плате прибора установлен самовосстанавливающийся предохранитель. Вход внешней аккумуляторной батареи (АКБ) обеспечивает резервное питание контроллера в случае пропадания напряжения в цепи основного питания. Встроенная в драйвер питания цепь управления и заряда внешней АКБ, позволяет своевременно осуществлять переход на резервное питание и обеспечивать поддержание уровня заряда АКБ, а также дает команду центральному процессору на передачу SMS-сообщения о достижении АКБ критического уровня разряда.
Блоки входов/выходов служат для контроля состояния и измерения параметров внешних устройств и механизмов, а также для управления различными исполнительными устройствами и устройствами оповещения.
Блок входов/выходов состоит из таких устройств, как цифровые входы, аналоговые входы и т.д.
Цифровые (дискретные) входы характеризуются двумя состояниями: "1" - разомкнут и "0" - замкнут на "массу" и могут фиксировать как изменение состояния входа, так и вести подсчет импульсов Режимы работы программируются индивидуально для каждого входа и могут принимать следующие значения.
При обычном входе контроллер фиксирует изменение состояния на цифровом входе, при этом в память контроллера пишется внеочередная точка трека с помощью которой можно определить точные координаты и время изменения состояния на входе. Этот режим идеально подходит для фиксации срабатывания различных датчиков и контроля работы механизмов. Например: тревожной кнопки, датчика давления масла, датчика наличия пассажира (такси), сработки охранной сигнализации, открытия дверей, различных исполнительных механизмов спец- и стройтехники и др. Также имеется возможность, при изменении состояния на входе, внеочередной отправки данных на сервер по протоколу GPRS или отправки SMS-сообщения на заданный номер телефона.
|
|
Режим накопительного счетчика предназначен для учета количества срабатываний входа и подсчета различных событий. Например, для подсчета количества импульсов, поступающих с датчиков расхода топлива с импульсным выходом (типа ДРТ-5 или VZO), датчика количества пассажиров, датчика подъема кузова самосвала и др. В режиме накопительного счетчика устанавливается период записи показаний счетчика в память прибора. Запись точки трека при изменении состояния на входе в этом режиме не производится.
Режим периодического счетчика предназначен для подсчета
количества импульсов в течение одной минуты. Режим периодического счетчика используется для снятия показаний датчиков, передающих значение измеряемого параметра в виде пачки импульсов, количество которых пропорционально величине измеряемого параметра. Например, этот режим используется для работы с датчиками температуры и оборотов двигателя с импульсным выходом. Запись точки трека при изменении состояния на входе в режиме периодического счетчика не производится.
Аналоговые входы служат для измерения значения параметров, величина которого пропорциональна уровню напряжения на аналоговом входе. Этот режим используется, например, для измерения уровня топлива в баке с помощью датчиков уровня топлива с аналоговым выходом (различные виды штатных датчиков, ДУТ-Е, LLS, "Стрела"), а также для
измерения температуры, давления, уровня жидкостей и других параметров,
измеряемых с помощью различных датчиков с аналоговым выходом.
Настройки прибора позволяют изменять период опроса аналоговых входов, а также различные параметры усреднения измеряемой величины и предоставляют возможность адаптивной записи (при изменении значения уровня напряжения на заданную величину). Контроллер может быть оснащен двумя аналоговыми входами с 10-разрядным АЦП. Первый аналоговый вход имеет диапазон измеряемого напряжения от 0 до 10 вольт, который делится на 1024 ступени (от 0 до 1023). Второй аналоговый вход имеет диапазон измеряемого напряжения от 0 до 24 вольт (но не более напряжения питания контроллера), который делится на 1024 ступени (от 0 до 1023).
Кроме того, контроллер имеет возможность использования аналоговых входов в качестве дискретных. В режиме работы входа в качестве дискретного, вход считается замкнутым при величине уровня напряжения на входе менее 6 вольт (т.е. фактически используется режим работы "по массе").
|
|
Транзисторные выходы служат для управления различными внешними исполнительными устройствами, а также для включения устройств оповещения. Контроллер оснащен блоком транзисторных выходов с открытым коллектором. Управление дискретными выходами (изменения состояния) производится с помощью управляющих SMS-сообщений. Существует возможность как изменения состояния выхода с фиксацией (до следующего управляющего SMS-сообщения), так и подачи на выход импульса определенной длительности (от 1 до 10 секунд). Кроме того, возможно использование одного транзисторного выхода для индикации входящего звонка, с помощью различных свето- и звукосигнальных устройств, подключенных к этому выходу.
Порт USB служит для программирования контроллера, а также для работы с контроллером в режиме GPS-мышь. В этом режиме, контроллер, подключенный к порту USB ПК или КПК с помощью кабеля, через драйверы последовательного виртуального порта (СОМ-порта) передает текущее местоположение по протоколу NMEA в формате RMC с периодичностью 1 раз в секунду. Это позволяет позиционировать положение объекта, оснащенного контроллером, в таких программах как OziExplorer, Google Earth Plus/Pro (Google Планета Земля Плюс/Про), ДубльГИС для ПК 3.0 и других.
RS-232 — интерфейс передачи информации между двумя устройствами на расстоянии до 15 метров. Информация передается по проводам цифровым сигналом с двумя уровнями напряжения. Логическому "0" соответствует положительное напряжение (от +5 до +15 В для передатчика), а логической "1" отрицательное (от -5 до -15 В для передатчика). Асинхронная передача данных осуществляется с фиксированной скоростью при самосинхронизации фронтом стартового бита. Интерфейс RS-232C предназначен для подключения стандартных внешних устройств.
Центральный микропроцессор (ЦМП) - это ядро контроллера, связывающее все компоненты системы воедино и обеспечивающее их взаимодействие, согласно заложенной в него программе. В качестве процессора выступает быстродействующая однокристальная микро ЭВМ, обеспечивающая скорость и точность вычислений достаточную для решения различных навигационных и сервисных задач. Программа процессора (прошивка или "firmware") - это набор алгоритмов. Благодаря этой программе, центральный процессор обеспечивает прием данных, поступающих от различных блоков системы, их логическую и математическую обработку и, как результат, принятие решений, на основании которых вырабатываются управляющие команды для блоков контроллера в зависимости от конкретной ситуации.
|
|
Для управления и организации взаимодействия внешних устройств с микроконтроллером в современном автомобиле может применяться CAN (Controlled Area Network) - специальная магистраль, обеспечивающая независимое и одновременное управление через общую шину. Полевая шина CAN характеризуется высокой скоростью передачи данных и помехоустойчивостью, а также способностью обнаруживать любые возникающие ошибки. Благодаря этому CAN сегодня широко используется в таких областях, как автомобильный и железнодорожный транспорт, промышленная автоматика, авиация, системы доступа и контроля.
Рассмотрим более детально принцип работы системы, показанной на рисунке 3.1. Главным звеном в данном устройстве является ЦМП, функции которого описаны выше. При срабатывании какого-либо устройства вся информация поступает в ЦМП по совмещенной системной шине и обрабатывается в соответствии с исполнительной программой, заложенной в его памяти.
Одной из функций данного устройства является периодический сбор информации и передача ее на сервер, обслуживающий данную систему. Сбор информации осуществляется с привязкой к координатам точки, в которой происходил сбор информации. Фиксацию координат производит приёмник спутниковой системы, который в непрерывном режиме осуществляет прием сигналов со спутника, вычисляет в своем процессоре координаты и по требованию центрального процессора импортирует их в сообщение от контрольных датчиков. Затем эта информация передаётся с помощью GSM модуля по радиосети на оборудование центрального сервера по сбору информации. В зависимости от функциональных возможностей модуля GSM передача информации может осуществляться при помощи таких технологий, как GSM, SMS сервис или GPRS. При наличии блока обработки сигналов UMTS возможна передача полученной информации с помощью нового режима высокоскоростного доступа на основе технологии W-CDMA, названного высокоскоростным доступом для передачи в линии «вверх» (High Speed Uplink Packet Access — HSDPA). При отсутствии сигнала сотовой связи данные сохраняются в памяти центрального процессора, и при восстановлении связи попытка передачи инициализируется снова. На сервере данные отображаются с помощью специального программного обеспечения на цифровой карте в режиме реального времени.
Одной из часто используемых функций является инициализация передачи данных при срабатывании одного из датчиков. Данная функция применяется как правило в случае срабатывания датчиков в аварийном режиме. Например, нам не нужно знать уровень масла в автомобиле, но при уменьшении значения его уровня до критического, на центральный процессор поступит сигнал, который активирует передачу данных по GSM-каналу. Для этого в автомобиле предусмотрены импульсные датчики, которые подключены к импульсному входу центрального процессора. Также данный вход может использоваться в качестве счетчика событий. В таком случае центральный процессор считывает количество импульсов, приходящих на данный импульсный вход. Такой режим работы применяется, например, для считывания оборотов коленчатого вала двигателя автомобиля.
Датчик аварийной системы оповещения предназначен для активации процедуры генерирования специального сигнала оповещения в случае возникновения аварийной ситуации. Активировать данную функцию можно вручную при незначительных авариях при помощи специальной тревожной кнопки. В автоматическом режиме данная функция срабатывает при значительных повреждениях, нарушении целостности кузова автомобиля либо при срабатывании датчика подушек безопасности.
|
|
|

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!