Определение
Определения прямолинейности поверхности какого-либо элемента станка такие же, как и определения прямолинейности для линии (см. 5.211).
Методы измерения прямолинейности
Методы измерения прямолинейности поверхности элементов станка такие же, как методы измерения прямолинейности линии (см. 5.212).
Измерение прямолинейности поверхности направляющих пазов или столов
Для измерения прямолинейности боковых поверхностей паза можно использовать, например, приспособление, изображенное на рисунке 26.
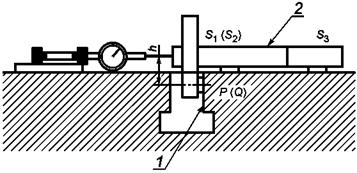
1 - измеряемая поверхность; 2 - измерительное приспособление (см. рисунок 27)
Рисунок 26
При перемещении этого приспособления вдоль паза индикатор, установленный на приспособлении, показывает отклонения от прямолинейности линии, проходящей через точки Р или Q при минимальном значении расстояния h (см. рисунок 26).
При измерении прямолинейности методом измерения углов по 5.212.2 следует учитывать расстояние d между двумя базовыми точками измерительного приспособления Р и Q (см. рисунок 27).

Рисунок 27

1 - контролируемая поверхность
Рисунок 28
Измерительное приспособление должно лежать на столе на трех опорных точках S 1, S 2, S 3 и иметь две базовые точки Р и Q, расположенные на измеряемой линии (см. рисунок 27).
Для измерения прямолинейности более сложных поверхностей, которые в случае могут быть не перпендикулярны ни к одной из базовых плоскостей, например наклонных направляющих, следует использовать более сложные приспособления для перевода плоскости измерения в прямоугольные координаты по линиям НН и VV (см. рисунок 28).
Измерение прямолинейности направляющих
Направление движения перемещаемого элемента станка обеспечивается направляющими или более сложными устройствами, которые не могут быть демонтированы без нарушения геометрии станка. Измерение прямолинейности направляющих может производиться только в случае доступности этого элемента. В противном случае измерение прямолинейности направляющих следует проводить путем измерения прямолинейности перемещения по ним элемента станка (см. 5.23).
Измерение отклонения от прямолинейности всегда должно производиться в рабочей плоскости. Обычно это горизонтальная (рисунок 29, линия АА) или вертикальная (рисунок 29, линия ВВ) плоскости. Исключение составляют некоторые специфические конфигурации компоновки станков (см. рисунок 36).

Рисунок 29
В поперечном сечении направляющие могут иметь различную форму, разработанную изготовителем станка.
Направляющие поверхности могут быть в виде:
a) одной плоскости или набора нескольких небольших плоскостей, соединенных вместе;
b) нескольких узких плоских секций, цилиндрических поверхностей или их комбинация.
V-образные направляющие
Измерительный мостик для таких направляющих должен опираться на пять контактных точек, в т.ч. четыре контактных точки Р и Q на V-образной направляющей и одна (пятая) точка на другой части системы направляющих.
Для измерения прямолинейности таких направляющих следует использовать приспособление с цилиндрической контрольной оправкой, имеющей два пояска контакта, образованных занижением диаметра в средней части, как показано на рисунках 30 и 31, или приспособление с охватывающей V-образной частью, как показано на рисунке 29, для измерения поверхности, сопряженной с направляющей, показанной на рисунке 30.

1 - свободный шарик
Рисунок 30

1 - пятая точка опоры
Рисунок 31
Примечание 12 - Пятая опорная точка не должна мешать базированию контрольной оправки на V-образной направляющей.
Цилиндрические направляющие
Для измерения прямолинейности таких направляющих следует использовать измерительный мостик, опирающийся на цилиндрическую направляющую четырьмя точками Р и Q, образующими V-образную охватывающую поверхность и одной (пятой) точкой на другую часть системы направляющих (см. рисунки 32 и 33).

1 - пятая точка опоры
Рисунок 32

1 - пятая точка опоры
Рисунок 33
Необходимо соблюдать требования к пятой точке опоры приспособления, изложенные в примечании 12.





