В системах гидроакустической локации существует несколько способов обзора акватории вокруг промыслового судна, к ним относятся [Кобяков, 1986]:
• Шаговый обзор;
• Cекторно-шаговый обзор;
• Одновременный круговой обзор.
Гидролокатор шагового обзора осуществляет обзор акватории дискретным (шаговым) перемещением одной относительно узкой диаграммы направленности (ДН) в горизонтальной плоскости при помощи электромеханического разворота акустической системы (АС) в заданном секторе. Часто гидролокаторы этого типа по аналогии с лучом прожектора называют прожекторными, или однолучевыми. Как правило, в гидролокаторах шагового обзора имеются режимы автоматического и ручного разворота (АС) в горизонтальной и вертикальной плоскостях обзора. Направление на цель определяется обычно методом максимального сигнала по ориентации (АС) в зону максимального уровня эхосигнала.
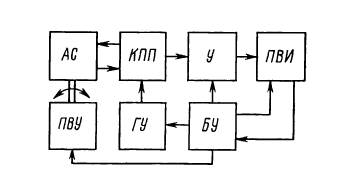
Рис. 1.3. Структурная схема ГА локатора шагового обзора
Упрощенная структурная схема гидролокатора шагового обзора приведена на рис. 1.3. (АС) в традиционных гидролокаторах выполняет две разнородные функции: преобразование энергии электрической в акустическую или обратно и формирование направленного излучения или приема сигналов. Поворотно-выдвижное устройство (ПВУ) по сигналам от блока управления (БУ) разворачивает (АС) в горизонтальной и вертикальной плоскостях. Коммутатор приёма-передачи (КПП) выполняет функции переключения режимов излучения и приема. (ГУ) вырабатывает мощные электрические импульсы определенной формы и длительности для подачи их на (АС) в режиме излучения. Усилитель усиливает и обрабатывает принятые (АС) эхосигналы от цели для подачи их на (ПВИ), которые в конечном итоге представляют оператору полученные данные о цели в форме, удобной для их анализа и принятия решения. (БУ) синхронизирует и управляет всей работой гидролокатора.
Гидролокаторы шагового обзора имеют одну (ДН) и обеспечивают за один цикл излучение - прием обзор акватории в телесном угле, определяемом шириной (ДН). Основными недостатками таких гидролокаторов является малая скорость обзора, особенно при работе на больших дистанциях, и наличие значительных непросмотренных участков при движении поискового судна с повышенной скоростью, а также отсутствие возможности одновременного наблюдения за несколькими целями без применения специальных средств обработки сигналов.

Рис. 1.4. Структурная схема ГА локатора секторно-шагового обзора
Гидролокатор секторно-шагового обзора позволяет одновременно обследовать акваторию в определенном секторе с помощью быстро сканирующей узкой ДН в приеме или излучении, осуществляемых электронными схемами, при неподвижной АС, а также дополнительно производить обследование более крупного заданного сектора в пределах углов ±180° путем электромеханического разворота АС. Наклон антенны в вертикальной плоскости производится чаще всего электромеханическим способом.
Упрощенная структурная схема одной из разновидностей секторно- шагового гидролокатора представлена на рис. 1.4.. В состав схемы, помимо известных блоков из гидролокатора шагового обзора, входят дополнительные блоки.
Необходимая длительность импульсов посылки τ вырабатывается формирователем при поступлении сигналов запуска от ПВИ (самописца или электронного индикатора) через БУ. Формирование ДН в излучении осуществляется с помощью фазосдвигающих цепей (ФСЦ). Высокочастотные сигналы коммутируются с помощью ключей коммутатора излучения (КИ). управляемых распределителем, и поступают на вход усилителей мощности (УМ). Выходы УМ через КПП подключаются к соответствующим элементам АС. Принимаемый АС эхосигнал через КПП поступает на входы предварительных усилителей (ПУ). Усиленные сигналы с ПУ подаются на линии задержки (ЛЗ) таких же типов, как и в генераторном тракте, с помощью которых осуществляется разделение каналов приема. С выходов ЛЗ сигналы поступают на основные усилители (ОУ), в которых происходит преобразование и усиление сигналов для обеспечения работы ПВИ, а затем через коммутатор приема (КП) сигналы подаются на ПВИ. Пеленг или курсовой угол определяются по номеру канала, в котором обнаружен эхосигнал, а дистанция - по шкале дальности.
Гидролокатор одновременного кругового обзора осуществляет одновременное обследование всей акватории в пределах 360° без пропусков обычно при помощи цилиндрической АС. Он позволяет получить наименьшее время обзора и визуализирует, например, картину промысловой обстановки вокруг судна. Известные в настоящее время варианты построения гидролокаторов одновременного кругового обзора можно разделить по способу решения ими двух основных задач.
Первая задача предусматривает быстрое облучение окружающей акватории: вторая - быстрый обзор облученной акватории таким образом, чтобы отсутствовала возможность пропуска эхосигналов с какого-либо направления за один цикл.
Для реализации одновременного облучения необходима большая энергетическая мощность, а для быстрого просмотра окружающей акватории в секторе 360° без пропусков необходимо использовать веер статических приёмных ДН или быстрое сканирование (внутриимпульсное) одной приемной ДН со скоростью, обеспечивающей круговой обзор без пропусков. Для этого ДН должна осуществлять один полный оборот за время, которое меньше минимально возможной длительности эхосигнала с любого направления (tск<τ). Вращение ДН осуществляется с помощью электронного коммутатора с частотой сканирования, равной fск = 1/tск. Синхронно с вращением ДН в реальном масштабе времени производится и развертка на электронном индикаторе кротового обзора. Эхосигнал с каждого направления состоит из "выборок", получающихся за счет быстрого сканирования приемной ДН.

Рис. 1.5. Структурная схема ГА локатора одновременного кругового обзора
Способ приема с помощью веера приемных статистических ДН предусматривает наличие в составе гидролокатора ЛЗ, каждая из которых формирует ДН. Соседние ДН. пересекаясь на уровне 0.7 (минус 3 дБ) по звуковом давлению, одновременно перекрывают сектор 360°. Для отображения обстановки на индикаторе кругового обзора в этом случае необходим электронный коммутатор, который должен подключать выход каждой статической ДН к электронном индикатору. Достижения микроэлектроники позволили реализовать наклон ДН в вертикальной плоскости электронным способом в пределах определенных углов. Данный метод ведет к значительному увеличению количества каналов АС и станции в целом, т. е. N = m·n.,где m - количество каналов, необходимых для обзора в горизонтальной плоскости, n - количество поясов АС, обеспечивающих наклон ДН в вертикальной плоскости в пределах требуемого угла.
Структурная схема одного из вариантов ГА локатора с одновременным круговым обзором приведена выше на рис.1.5. КП опрашивает каналы ПУ за время, равное длительности импульса посылки. Число каналов, опрашиваемых одновременно, зависит от выбора ширины ДН. В КП имеются ЛЗ, которые служат для компенсации сдвигов фаз. обусловленных кривизной дуги, образованной элементами цилиндрической АС, участвующими в формировании ДН. После КП сигналы усиливаются ОУ и поступают на индикатор кругового обзора (ИКО). В приведенном примере излучение акустической энергии - ненаправленное, наклон ДН отсутствует.
ОБЪЕКТЫ ПРОМЫСЛА
Ставя задачи проектирования РПА, с помощью который осуществляется поиск объектов промысла, целесообразно выявить основные характеристики последних, которые включают в себя:
• параметры объектов промысла;
• поведение и районы обитания (для обоснования схемы станции и метода обнаружения);
• скорость перемещения (для расчета полосы пропускания приёмно-усилительного тракта, учитывая эффекта Доплера);
• отражательная способность (сила цели).
Основные категории объектов промысла представляют группа большинства видов рыб и млекопитающие – киты. Ввиду того, что в настоящий момент промысел последних ограничен, будем сосредоточены на характеристике группы рыб.
Рыба. Ввиду образа жизни промысловую рыбу разделяют на две группы: пелагическую и придонную. Первая группа, превалирующую часть своей жизни обитает в толще акватории. Вторая группа рыб, обитает в непосредственной близости от дна.
Стая или косяк – совокупность групп рыб одного и того же вида, которые близки по размерам и сходные по своему биологическому состоянию. Более всего распространен стайный образ жизни у пелагических рыб, питаются они планктоном. Величина, а также плотность стаи напрямую зависит от особей, которые ее составляют. Так, например, более мелкие рыбы обычно создают соответственно более плотные стаи. Количество рыб, образующих стаю, может варьироваться в больших пределах. В качестве примера можно привести факт, что стаи тресковых рыб обычно состоят из нескольких десятков или сотен особей, а в свою очередь косяки сельди могут состоять из многих тысяч.
Скопление является объединением стай и разреженной рыбы во период нагула, нереста и зимовки. Обычно скопление составляют особи разных видов и размеров.
Разреженное скопление − вид скопления, в котором на рассеивающую единицу пространства в среднем приходится не больше одной рыбы. Другими словами, практически каждая рыба будет регистрироваться на эхограмме самописца рыбопоисковой аппаратуры в виде обособленной записи. Предельная плотность скопления, регистрируемого как разреженное, определяется по следующему выражению: ρпр.= 1/ΔV, где ΔV − объем рассеиваемого элемента пространства в водном слое, толщина которого cτ/2 (величина ρпр. является параметром РПА, характеризующим пространственную разрешающую способность; с − скорость звука в воде, м/с; τ − длительность зондирующего импульса, с).
Плотное скопление − тип скопления, в котором в рассеивающем элементе пространства ∆V содержится не менее 10 особей рыб. Плотность скопления при этом ρс > 10.
Смешанное скопление – тип скопления, у которого плотность варьируется в промежутке между плотностями разреженного и плотного скоплений: ρпр. ≤ ρс ≤ 10. [Орлов Шабров 1987]
Ихтиология (наука о рыбах) рассматривает две скорости движения рыб: максимальную и крейсерскую. Максимальную скорость перемещения рыбы могут развить в течение малого промежутка времени (не более 10 мин) в ситуации ухода от опасности. Крейсерская скорость энергетически оптимальна по причине того, что у рыб есть способность выдерживать ее без усталости в период до 24 часов. Скорость движения рыбы имеет зависимость от размеров и может определятся по следующей формуле [30]: vp = 0,525 fxlpt -1/8, где lp –длина рыбы; t − время, с; fx – частота колебаний хвостового плавника, Гц. Максимальные частоты fx (по материалам киносъемки) для пелагических особей (тунца, скумбрии, сельди) − до 30 Гц, а для донных (трески, пикши) fx не превышает 14 Гц.
Отражательную способность рыбы (силу цели) ищут путем эксперимента и определяют величиной обратного рассеяния σ как условную площадь, перпендикулярную к вектору распространения зондирующего сигнала, которая создает рассеяние, аналогичное реальному объекту величин. σ зависит от частоты и длительности зондирующего сигнала, а также породы, массы, размеров и ракурса рыбы, а для стай – дополнительно от плотности распределения особей и размеров скоплений. В результате экспериментов установлена зависимость сечения обратного рассеяния σ, длины акустической волны λ и размера рыбы l [40, 57]: σ/λ2 = 0,043(l/λ)1,91.
ГИДРОАКУСТИЧЕСКАЯ АНТЕННА
Основной функцией гидроакустического антенного устройства является преобразование электрической энергии в звуковую, последующего излучения ее в водную среду, и обратный процесс: прием звуковой энергии и альнейшее преобразовании ее в электрическую [Орлов Шабров 1974].
В водной среде антенна создает звуковое поле. Это поле характеризируется пространственно-временным потенциалом, который связан со звуковым давлением и колебательной скоростью.
Скорость распространения волны в воде с, м/c, находится в связи с длиной волны λ, м, а также с частотой колебаний f, Гц. Эта связь выражается в следующем соотношении: f λ= с.
Звуковая энергия, рассеиваемая антенной в единицу времени, называется акустической мощностью Wв (H*м/с; Вт).
Обычно главное требование от антенны – это излучение энергии в определенных направлениях. Направленность антенны обуславливается явлением интерференции волн. Каждая точка антенны излучает расходящиеся сферические волны, причем в свою очередь каждая точка полнового фронта рождает новые элементарные сферические волны. В каких-то направлениях колебания усиливаются, при совпадении фаз колебаний, в каких-то – в той или степени гасятся, если фазы колебаний не совпадают. Таким образом происходит распределение энергии в пространстве. Распределение энергии зависит от конфигурации антенного устройства: его формы, а также частоты, фаз, амплитуд колебаний отдельных точек антенны. Закономерность распределения в водной среде потенциала Ф, звукового давления p или акустической мощности Wа, которые излучаются ГА в зависимости от направления есть ничто иное, как характеристика направленности.
Форма ХН зависит от изменения расстояния от точки наблюдения до антенны. Антенна излучает волны, совпадающие по фронту с формой её поверхности. К примеру, плоская синфазно колеблющаяся антенна с размером раскрыва D излучает плоские волны, которые сохраняют свою форму до расстояния D2/16λ, называемой «Прожекторной» зоной. Дальше начинается расхождение волнового фронта (ближняя зона дифракции). В этой зоне резко выражены интерференционные явления и искажается характеристика направленности. Ближняя зона располагается до расстояния, которое называется критическим, и примерно равно Lк = 2D2/λ, где D – максимальный размер апертуры. На таком расстоянии волны становятся сферическими и ХН практически стабилизируется по форме (дальняя зона дифракции).
Основные характеристики ГА
Форма характеристики направленности в зависимости от принципа построения станции может быть «игольчатой», «ножевидной», секторной, тороидальной и сферической. У ХН различают основной лепесток, который имеет максимальный уровень по амплитуде, и боковые лепестки с меньшими уровнями.
Ширина основного лепестка ХН 2θR с определяет разрешающую способность антенны и измеряется в градусах на уровне 0.7 от максимального значения по давлению или на уровне 0.5 по мощности.
Уровень боковых лепестков измеряют в процентах либо децибелах по отношению к уровню основного лепестка. Боковые лепестки являются нежелательными элементами ХН, так как могут приводить к возникновению целей и уменьшению помехоустойчивости. Работая над проектированием антенн, максимальный уровень боковых лепестков следует ограничить величиной 10 – 30% по давлению.
Неравномерность ХН – понятие, которое вводят с целью ограничения отклонения формы ХН в пределах основного лепестка от заданной и применяют обычно к широким ХН. Чаще всего неравномерность характеристики направленности ограничивают 3 дБ по давлению и 6 дБ по мощности.
Коэффициент осевой концентрации (КОК) характеризует энергетическую эффективность антенны, как в режиме излучения, так и в режиме приема. В первом случае – это способность антенны концентрировать излученную энергию в заданном направлении, а во втором – выделять полезный сигнал на фоне помех. В режиме излучения КОК определяют, как отношение акустических мощностей, которые излучаются направленной и ненаправленной антеннами, создающими одинаковые интенсивности звука (потоки звуковой энергии через единицу площади в единицу времени) в выбранном направлении на равном удалении от центров излучения. В режиме приема КОК можно определить, как отношение мощностей, которые развивают направленная и ненаправленная антенны, находясь в поле изотропных помех при равных чувствительностях.
Чувствительность характеризует способность антенны преобразовывать звуковую энергию в электрическую и выражается отношением напряжения, которое возникает на выходе антенны, к звуковому давлению, воздействующему на нее. В системе СГС чувствительность измеряется в мкВ/Па.
Электроакустический коэффициент полезного действия (КПД) характеризует излучающую способность антенны и является отношением излучаемой акустической мощности к подведенной к антенне электрической мощности. Считается, что антенны с КПД 40-60% обладают хорошей излучающей способностью. Остальная часть энергии расходуется на механические и электрические потери.
Частотная характеристика (ЧХ). Данный параметр характеризует эффективность антенны как электроакустического преобразователя в диапазоне частот. Антенны эхолокационных станции, как правило, состоят из резонансных преобразователей. Вне резонанса их эффективность снижается.
Полоса пропускания (ПП) определяет частотный диапазон эффективного преобразования энергии. Данный параметр измеряется на уровне 0.7 от максимального значения давления и чувствительности и на уровне 0.5 по мощности в процентах от резонансной частоты. ПП антенн обычно колеблется в предела ±(2.5-15)% от f резонансной.
Удельная акустическая мощность. В системе СГС измеряется в Вт/см2. Данный параметр представляет собой мощность, приходящуюся на единицу излучающей поверхности. Максимально допустимая удельная акустическая мощность ограничивается конструктивными особенностями преобразователей таких, как механическая прочность, а также кавитационной прочностью воды, которая зависит от ее загазованности, частоты акустических колебаний, гидростатического давления, длительности излучаемого импульса. Допустимая удельная акустическая мощность может лежать в пределах 0.5-10 Вт/см2.
Раскрыв антенны – это проекция излучающей либо принимающей поверхности на плоскости, перпендикулярную излучения (приема). Чем больше волновые размеры раскрыва антенны, тем острее может быть ее ХН.
Сопротивление антенны. В общем случае данный параметр представляет собой комплексную величину, которая складывается из внутреннего сопротивления (сопротивления гидроакустической антенны, находящейся в воздухе) и сопротивления излучения, характеризующего реакцию среды. Сопротивление излучения антенны можно найти, составив произведение из акустического произведения волны соответствующей формы и площади излучающей поверхности.
Так, например, для плоских волн, у которых акустическое сопротивление чисто активное и равно ρc, сопротивление излучения антенны будет находится по формуле: zп = ρcS, где ρ – плотность среды, с – скорость звука в водной среде, S – площадь излучающей поверхности [Орлов Шабров 1974].
Сферическая антенна
Наиболее перспективным классом выпуклых антенн антенн после цилиндрических являются сферические антенны. Такие устройства позволяют осуществлять поворот диаграммы направленности по всем углам только за счет коммутации ее элементов. Но на практике из-за сложных конструктивных особенностей она применяется довольно редко. Число преобразователей, необходимых для обеспечения такого широкоугольного обзора пространства, должно быть приблизительно в пять раз больше, чем у той же антенны с механическим поворотом. Основные трудности возникают при разработке конструкции антенного устройства, который должен обеспечивать форму сферы из преобразователей при достаточно большом количестве электрических выводов. Один из вариантов осуществления сферической конструкции приведен на рис. 3.1. [HiPAP]. Управление ДН таких антенн должно управляться ЭВМ или микропроцессором.
Гидролокационное устройство со сферической антенной позволяет производить быстрый и эффективный поиск в полусферическом объеме воды в пределах дальности действия самого гидролокатора. Этого можно достичь двумя режимами его работы: круговым и комбинированным.
В режиме кругового обзора антенна излучает луч в тонком слое горизонтального кругового сектора. Этот сектор может наклоняться электронным способом по вертикали в интервале от -10о до 90о с очень узким угловым шагом, значение шага может доходить порядка 1.5о. Данный режим управления лучом полностью решает проблему «слепых зон» под судном и вблизи его, которые имеются даже при использовании гидролокаторов с цилиндрическими антеннами.

Рис. 3.1. Конструкция сферического антенного устройства
В комбинированном режиме поиска гидролокатор излучает луч как способом, аналогичным описанное выше, но в секторе 180о, так и в вертикальном полусекторе обзора эхолотного режима, при котором луч сканируется электронным способом в вертикальной плоскости в пределах 180о за определенное количество шагов. При этом ориентация вертикального сектора изменяется шагами также и в горизонтальной плоскости. Таким способом за несколько импульсов посылки просматривается вся полусфера под судном. Помимо этого, сферическая антенна в данном случае позволяет осуществить электронную стабилизацию гидроакустического луча в пространстве сразу в двух плоскостях. Показ целей в этом режиме можно производить на одном электронном индикаторе, разделяя поля для информации гидролокатора и информации эхолота [Кобяков, 1986].





