

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Топ:
Оснащения врачебно-сестринской бригады.
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Интересное:
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Измерение нагрузок осуществляется специальным прибором, называемым динамографом. Графическая зависимость нагрузки, действующей в каком-либо сечении штанг в течение насосного цикла (ход вверх — ход вниз) в функции перемещения этого сечения, называется динамограммой. Динамограф — прибор, регистрирующий на специальном бланке изменение нагрузки за время насосного цикла. Существует много типов динамографов, но все они по принципу действия могут быть разделены на несколько классов: механические, гидромеханические, электрические, электронные и др. Каждый класс динамографов имеет как преимущества, так и недостатки.
В зависимости от места установки динамографа они разделяются на две группы:
1. Глубинные динамографы, устанавливаемые, как правило, в нижней части колонны штанг (над плунжером насоса). Они регистрируют нагрузки, действующие в течение насосного цикла на плунжер. Широкого применения в нефтепромысловой практике глубинные динамографы до настоящего времени не получили.
2. Поверхностные динамографы, устанавливаемые в месте соединения полированного штока с канатной подвеской станка-качалки (ТПШ) и получившие довольно широкое распространение.
Рассмотрим принципиальную схему поверхностного гидромеханического динамографа, представленную на рис. 5.17. Динамограф состоит из двух частей: силоизмерительной I и регистрирующей П.
Силоизмерительная часть состоит из верхнего 1 и нижнего 2 рычагов, которые для измерения нагрузки устанавливаются между траверсами канатной подвески и воспринимают нагрузку

Рис. 5.17. Принципиальная схема гидромеханического динамографа:
1 — верхний рычаг; 2 — нижний рычаг; 3 — опорный ролик; 4 — призма; 5 — мессдоза; 6 — поршень; 7 — шарик; 8 — капиллярная трубка; 9 — геликоидальная манометрическая пружина; 10 — корпус; 11 -- ходовой винт; 12 — каретка со столиком; 13 — стрелка с пером; 14 — шкив; 15 — шнур; 16 — ролик
|
|
в течение насосного цикла. Для изменения масштаба измерения усилий требуется изменить плечо рычагов по отношению к воспринимаемой нагрузке G перестановкой опорных роликов
3. Действующая нагрузка G передается рычагам через призмы
4. Верхний рычаг 1 имеет мессдозу 5 с мембраной. Мессдоза заполнена жидкостью. В мессдозу входит поршень 6, нижний торец которого через шарик 7 опирается на нижний рычаг 2. Мессдоза 5 связана капиллярной трубкой 8 с геликоидальной манометрической пружиной 9. Под действием приложенной нагрузки G давление жидкости в мессдозе повышается и по капиллярной трубке передается геликсной пружине 9, под действием чего верхний конец ее разворачивается на угол, пропорциональный давлению.
Регистрирующая часть динамографа включает корпус 10, внутри которого имеется ходовой винт И, с которым связана каретка 12 со столиком. На верхнем конце геликсной пружины имеется стрелка с пером 13. При вращении ходового винта 11 каретка 12 со столиком перемещается вверх или вниз. На конце ходового винта имеется шкив 14 с возвратной пружиной. На шкив намотан шнур 15. Второй конец шнура через ролик 16 закрепляется к устьевой арматуре. После закрепления динамографа между траверсами и шнура к устьевой арматуре прибор готов к работе. При ходе вверх шкив 14 вращается, приводя в действие ходовой винт 11, который перемещает каретку 12 со столиком вверх. При ходе вниз шнур 15 наматывается на шкив 14 под воздействием возвратной пружины, а ходовой винт 11 перемещает каретку 12 со столиком вниз.
На столике каретки закрепляется бланк, на котором и фиксируются пером 13 изменяющиеся в течение хода «вверх—вниз» нагрузки, действующие в ТПШ. Перемещение каретки со столиком пропорционально ходу полированного штока.
|
|
Изменение масштаба регистрации усилий достигается перестановкой опорного ролика 3 между верхним 1 и нижним 2 рычагами; изменение масштаба перемещения каретки 12 со столиком производится сменой диаметра шкива 14.
Таким образом, применение динамографа позволяет фиксировать зависимость усилия, действующего в ТПШ, в функции перемещения ТПШ (длины хода полированного штока) G = f(S) и называемой динамограммой.
Широкое распространение гидромеханического динамографа обусловлено его простотой, оперативным получением первичной информации - динамограммы и возможностью здесь же, на месте, определения основных неисправностей СШНУ или причин недостаточной эффективности работы установки.
К недостаткам данного вида оборудования относятся низкая точность и достоверность информации, субъективность в оценке и расшифровке динамограмм, остановка станка-качалки для установки динамографа, большие затраты времени и ручного труда операторов по исследованию скважин, особенно при сложных погодно-климатических условиях, невозможность телемеханизации и телеавтоматизации процесса динамометри-рования, затруднение в сборе и обработке полученной информации с помощью ЭВМ.
В настоящее время в нефтяной промышленности при технической диагностике СШНУ широкое распространение получили микропроцессоры.
Существует множество видов оборудования для диагностики и контроля за работой ШСНУ на базе микропроцессорных систем.
Так, например, фирма «АТК» (г. Пермь) предлагает систему, состоящую из стандартного геликсного динамографа, датчика давления и перемещения, который соединен со вторичными приборами, предназначенными для хранения и первичной обработки информации, а также для передачи этой информации в ЭВМ для обработки и анализа полученных данных. Фирма поставляет также программное обеспечение, позволяющее определить до 14 параметров системы «пласт — скважина — установка», такие как: динамический уровень, дебит скважины, нагрузка в точке подвеса колонны штанг, коэффициенты подачи и наполнения насоса и некоторые другие. Однако при всех своих достоинствах этот способ динамометрирования имеет свои недостатки. К ним в первую очередь относится необходимость остановки станка-качалки для монтажа динамографа, подвеска полированного штока на специальном зажиме, ручной монтаж и демонтаж динамографа между траверсами канатной подвески станка-качалки, невозможность телемеханизации процесса динамометрирования.
|
|
Подобное оборудование используется фирмой Dynapump (США). В этой системе геликсный динамограф заменен на электронные датчики давления, а персональный компьютер максимально приближен к скважине для оперативной обработки и анализа информации, а также выдачи рекомендаций по дальнейшей эксплуатации данной скважины. Система в целом мобильна и имеет ряд преимуществ перед ранее известными.
К недостаткам этой системы относится невозможность телемеханизации процесса диагностирования. Этого недостатка лишены системы, разработанные фирмами «Mobil Oil Co» (США), «DELTA-X» (США), «Baker CAC» (США). Система диагностики включает датчик нагрузки на колонне штанг, систему сбора данных и каналы от конечных устройств к ЭВМ. Система состоит из центрального, обрабатывающего информацию, комплекса и полевых компьютеров, обслуживающих группы скважин.
Оценка технического состояния ШСНУ проводится по результатам последовательных замеров определенных параметров работы. Система применяется не только для диагностики, но и для оптимизации режима работы установок, анализа нагруженности колонны насосных штанг, работы станка-качалки и его уравновешенности.
Компания «ЭХОМЕТР» (США) предлагает комплексную систему исследования работы скважин. Для количественного динамометрического анализа необходимы данные высокой степени точности, для получения которых требуется использование калиброванного датчика. Преимущество этой системы состоит в высокой скорости обработки данных компьютером и чувствительности к ускорению датчика нагрузки.
Существуют также системы диагностики и других зарубежных фирм.
В последнее время большое количество российских фирм занимается разработкой и внедрением систем диагностики работы скважинных штанговых насосов. Среди них необходимо отметить систему диагностики насосных установок СДНУ-ЗМ (разработчик — РГУ нефти и газа им. И.М. Губкина), аппаратно-программный комплекс динамометрирования скважин «Квантор» (г. Набережные Челны), электронный динамограф MS-117 (фирма Маркетинг-Сервис, г. Набережные Челны), динамограф СИДДОС (фирма «СИАМ» г. Томск), комплекс диагностики скважин «КДС-П» (ПермНИПИнефть, г. Пермь), комплекс диагностики станков-качалок «Омега» (АОЗТ «Волжское конструкторское бюро», г. Самара) и другие. Практически все они основаны на анализе динамограмм, которые снимаются с помощью тензометрических датчиков нагрузки и датчиков перемещения головки балансира или полированного штока. Также, как в ранее рассмотренных системах («Дельта-Х», «ЭХОМЕТР», Dynapump), датчики нагрузки могут быть накладными (на полированный шток) или встраиваемые в канатную подвеску станка-качалки. Полученные в результате замеров динамограммы передаются на компьютеры по физическим линиям (проводные системы) или по системам радиосвязи. В некоторых конструкциях фирмы «Микон» (г.Набережные Челны) и фирмы «СИАМ» (г. Томск) микро-ЭВМ встроена в прибор, совмещенный с датчиком нагрузки. В этом случае микро ЭВМ оснащена и датчиком акселерометром, заменяющим датчик перемещения полированного штока. Обработка динамограммы проводится компьютером по заданной программе. Кроме динамограмм указанные системы могут проводить замеры ваттметрограмм для определения уравновешенности станка-качалки. Некоторые из современных систем диагностики пытаются воссоздать принципы, заложенные в СДНУ-ЗМ в начале 90-х годов XX века: тестирование клапанов скважинного штангового насоса, определение негерметичных интервалов колонны НКТ, использование системы для точного определения действительного дебита насосной установки, построение плунжерной динамограммы с определением нагрузок в штанговой колонне в любом ее сечении.
|
|
Кроме отсутствия субъективного подхода к анализу динамограмм и ваттметрограмм, электронные системы диагностики имеют важное преимущество, заключающееся в сохранении всех данных по исследованию скважин в хронологическом порядке. Это позволило создавать базы данных на нефтедобывающих предприятиях, которые используются для отслеживания правильности разработки месторождения и движения нефтепромыслового оборудования.
Динамограммы
Динамограмма представляет собой замкнутую фигуру, размеры которой зависят от действующих усилий и длины хода полированного штока (при выбранных масштабах измерения G и S). Форма динамограммы связывается с работой всей глубинно-насосной установки (ее подземной части) и отражает нарушения в различных элементах подземного оборудования. Динамометрирование позволяет оперативно устанавливать нарушения в работе установки и принимать соответствующие меры.
|
|
1.Теоретические динамограммы
Простейшая теоретическая идеальная динамограмма, зафиксированная у плунжера при нормальной работе глубинного насоса, представлена на рис. 5.18, а. Точка А характеризует начало хода плунжера вверх, когда нагнетательный клапан закрыт, а всасывающий — открыт и на плунжер действует нагрузка Gn, величина которой определяется точкой В. Таким образом, линия АВ — это линия восприятия нагрузки на плунжер при

Рис. 5.18. Простейшие теоретические динамограммы при статическом режиме работы установки:
а - зафиксированная у плунжера; б - зафиксированная в точке подвеса
начале хода вверх. В течение всего хода вверх (линия ВС) нагрузка остается постоянной. В точке С (начало хода плунжера вниз) нагнетательный клапан открывается, а всасывающий — закрывается, и нагрузка Gn с плунжера передается на трубы (линия CD). В течение всего хода вниз (линия DA) нагрузка на плунжер остается постоянной.
При фиксировании динамограммы в ТПШ вид динамограммы изменяется, что связано с особенностями восприятия нагрузки колонной штанг, являющейся упругой системой. Для статического режима при нормальной работе глубинного насоса динамограмма в ТПШ имеет вид, представленный на рис. 5.18, б. Точка А соответствует началу хода полированного штока вверх. Плунжер насоса остается неподвижным в течение определенного времени (нагнетательный клапан закрыт), и происходит начальная деформация штанг и труб (линия АВ). В точке В всасывающий клапан открыт, нагрузка на штанги стабилизируется и остается постоянной в течение хода вверх (линия ВС). В точке С полированный шток (ТПШ) начинает двигаться вниз. Всасывающий клапан закрывается, а через определенное время открывается нагнетательный. Нагрузка

Рис. 5.19. Влияние на форму динамограммы инерционных и вибрационных процессов
в ТПШ снижается (линия CD), штанги сокращаются, а трубы удлиняются (упругие деформации штанг и труб). В точке D нагрузка на штанги стабилизируется и остается постоянной в течение всего хода вниз (линия DA). На динамограмме нанесены нагрузки от сил трения при ходе вверх и вниз. Нагрузки, действующие в установке при статическом режиме работы, нанесены на динамограмме рис. 5.18, б.
Более сложными становятся динамограммы с учетом инерционных и вибрационных нагрузок. На рис. 5.19 показаны все нагрузки, действующие в системе при ходе вверх и вниз.
Теоретические динамограммы могут быть построены только для некоторых случаев. В практической деятельности расшифровка динамограмм требует индивидуального квалифицированного анализа. В настоящее время для расшифровки динамограмм используется метод сравнения, базирующийся на адекватной математической модели работы глубинно-насосной установки. Суть этого метода заключается во введении в модель любой неисправности в любом элементе глубинно-насосной установки, которая отражается на модельной динамограмме. Сравнение фактической (промысловой) динамограммы с модельной позволяет установить характер неисправности. Такой подход позволяет с помощью математической модели построить необходимое количество модельных динамограмм, используя которые можно устанавливать по виду практической динамограммы неисправность.
2. Практические динамограммы
Рассмотрим некоторые практические динамограммы, которые дешифруются при использовании простейшего анализа.
Влияние свободного газа, попадающего в цилиндр насоса при такте всасывания (рис. 5.20).
Эти динамограммы отличаются характером процесса разгрузки колонны штанг при ходе вниз. Если под плунжером насоса имеется свободный газ, то при ходе плунжера (штанг) вниз замедляется процесс разгрузки штанг вследствие сжимаемости газожидкостной смеси в цилиндре насоса. При этом вид динамограммы зависит от давления на приеме насоса. При малых давлениях на приеме получают динамограмму, показанную на рис. 5.20, а, а при больших — динамограмму, показанную на рис.
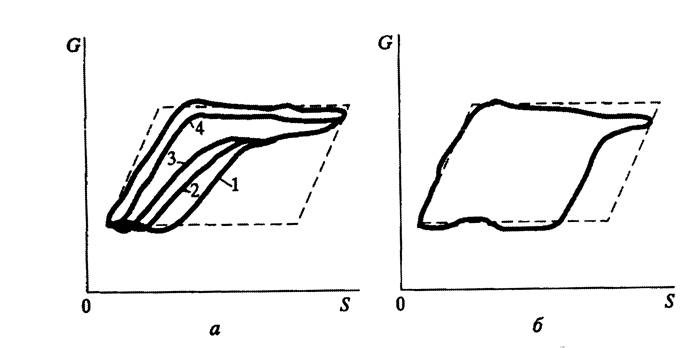
Рис. 5.20. Динамограммы для случая влияния свободного газа:
а - динамограммы при небольших давлениях у приема насоса, причем линия 1 при Рпр1, 2 - Рпр2, 3 - при Рпр3 (Рпр1> Рпр2> Р), линия 4 - срыв подачи насосом; б - динамограмма при большом давлении у приема насоса
5.20, б. По мере роста объема свободного газа в цилиндре насоса площадь динамограммы уменьшается (линии 1,2,3 на рис. 5.20, я), а при срыве подачи вследствие свободного газа динамограмма приобретает следующий вид (линия 4 на рис. 5.20, а).
Превышение подачи установки над притоком. Очень часто по форме динамограммы при влиянии свободного газа похожи на динамограммы, когда подача насоса превышает приток продукции в скважину и давление на приеме резко снижается. В этом случае необходимо проследить за формой динамограмм, фиксируемых последовательно одна за другой после кратковременной остановки скважины. В случае превышения подачи насоса над притоком продукции в скважину первая после остановки скважины динамограмма покажет полное заполнение цилиндра при такте всасывания (рис. 5.21, динамограмма 1). Последовательно фиксируемые динамограммы 2, 3 и 4 будут принимать форму, характерную для влияния свободного газа.

Рис. 5.21. Динамограмма при превышении притока продукции в скважину:
1 - нормальное заполнение цилиндра при такте всасывания (после остановки скважины); 2, 3, 4 - динамограммы, фиксируемые через определенные промежутки времени после снятия первой динамограммы
Нарушение герметичности насоса, связанное с утечками в нагнетательной части насоса (нарушение герметичности нагнетательных клапанов или пары «цилиндр-плунжер»), характеризуется выполаживанием линии восприятия нагрузки штангами при ходе вверх, большей крутизной линии разгрузки штанг и скруглением линии нагрузки в точках С и D (рис. 5.22, а). Утечки в приемной части насоса (нарушение герметичности всасывающего клапана или посадочного конуса вставного насоса — при нижней посадке) характеризуются выполаживанием линии разгрузки штанг при ходе вниз, большей крутизной линии восприятия нагрузки штангами и скруглением линии нагрузки в точках А и В при ходе вверх (рис. 5.22, б).
Неправильная посадка плунжера насоса отражается на динамограммах по-разному. Удар плунжера о нижний (всасывающий) клапан или низкая посадка плунжера вследствие неправильной подгонки длины штанг при монтаже проявляется на динамограмме петлей в нижнем левом углу ее (рис. 5.23, а). Срыв нижнего конуса захватным штоком при высокой посадке плунжера проявляется на динамограмме в виде петли в правом верхнем углу и характерными изменениями нагрузки при ходе

Рис. 5.22. Динамограммы при нарушении герметичности насоса: а - утечка в нагнетательной части насоса; б - утечка в приемной части насоса
вниз, определяемыми колебаниями колонны штанг вследствие удара в момент посадки конуса (рис. 5.23, б).

Рис. 5.23. Динамограммы при неправильной посадке плунжера в цилиндре насоса:
а - при ударе плунжера о всасывающий клапан; б - высокая посадка плунжера и срыв нижнего конуса захватным штоком
Обрыв штанг (отворот плунжера) характеризуется на динамограмме незначительной разницей в нагрузках при ходе вверх и вниз, т.е. динамограмма имеет форму узкой горизонтально расположенной петли (рис. 5.24), которая располагается на уровне нагрузки от веса штанг в продукции скважины, если произошел отворот плунжера или обрыв штанг у плунжера (рис. 5.24, а). Местоположение такой динамограммы связано с местом обрыва: петля располагается между нулевой нагрузкой и нагрузкой от веса штанг в продукции (рис. 5.24, б).

Рис. 5.24. Динамограммы при обрыве штанг (отвороте плунжера):
а - обрыв штанг у плунжера (отворот плунжера); б - обрыв штанг в середине штанговой колонны (динамограмма 1) и обрыв в верхней части колонны (динамограмма 2)
Заедание плунжера характеризуется на динамограмме значительным местным увеличением или снижением нагрузки в сравнении с нагрузками при нормальной работе установки. На рис. 5.25, а показана динамограмма с заеданием плунжера в конце хода вверх, а на рис. 5.25, б — когда заедание плунжера происходит в конце хода вниз.
Следует отметить, что динамометрирование штанговых глубинно-насосных установок является эффективным средством контроля состояния системы и позволяет своевременно принимать необходимые меры в случае нарушения работы отдельных элементов. Кроме того, динамограмма позволяет рассчитывать с определенной точностью некоторые технологические характеристики, хотя для этого необходимо обычную методологию снятия динамограмм дополнить регистрацией нагрузок, действующих в верхнем и нижнем мертвых положениях полированного штока, для чего в этих положениях необходима остановка станка-качалки.
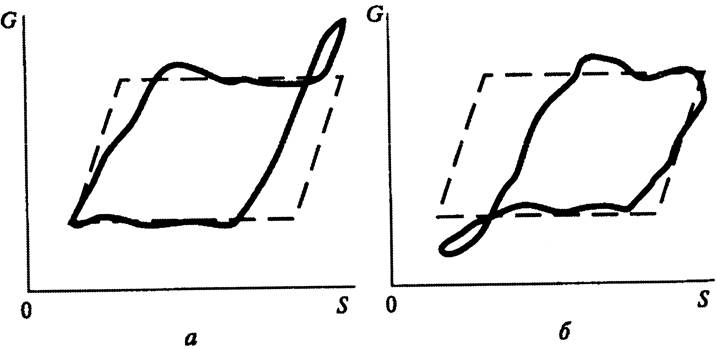
Рис. 5.25. Динамограммы при заедании плунжера в цилиндре:
а - в конце хода вверх; б - в конце хода вниз
|
|
|

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!