Содержание
Введение
1. Общие сведения о металлорежущих станках
1.1 Анализ конструкции современных металлорежущих станков
1.2 Назначение станка
1.3 Технические характеристики станка
1.5 Основные узлы станка
1.5 Виды движения в станке
1.6 Конструктивные особенности станка
2. Расчет базовых элементов станка
2.1 Обоснование вида направляющих станка и выбор материала
2.2 Обоснование конструкции основных базовых элементов и выбор материала
3. Кинематический анализ станка
3.1 Описание кинематической схемы станка
3.2 Движения резания
3.3 Движения подач
3.4 Вспомогательные движения
4. Указания по эксплуатации и обслуживанию станка
5. Требования техники безопастности и экологии при работе станка
6. Обоснование экономической эффективности станка
7. Режущий инструмент
7.1 Назначение режущего инструмента
7.2 Технические требования, предъявляемые к режущему инструменту
7.3 Элементы конструкции и геометрические параметры инструмента
Заключение
Литература
Введение
В эпоху научно-технической революции технический прогресс прежде всего связан с машиностроением, созданием новых, более совершенных и более производительных машин, механизмов и агрегатов, разработкой комплексов и систем, объединяющих в единое целое разнообразные машины и технические устройства.
Количественное и качественное развитие машиностроения в значительной степени зависит от станкостроения. Без развития станкостроения нельзя добиться широкого спектра развития производства, выпуска деталей, непрерывного технического прогресса, роста производительности труда.
Основными направлениями экономического и социального развития на 1986-1990 годы и на период до 2000 года в станкостроительной промышленности предусмотрено обеспечить опережающий выпуск металлорежущих станков с числовым программным управлением, станков типа "обрабатывающий центр", тяжелых и уникальных станков и прессов, оборудования для автоматизации сборки массовых изделий в машиностроении, роторных, роторно-конвейерных и других автоматических линий для машиностроения и металлообработки.
Целью моего курсового проекта является изучить горизонтальный многоцелевой станок с ЧПУ и АСИ и построение структурной сетки и графика частот вращения. Я выбрал модель 2204ВМФ2.
1.Общие сведения о металлорежущих станках
Развитие современной промышленности неразрывно связано с автоматизацией технологических процессов в самых разнообразных отраслях техники. Особенное значение имеет автоматизация при замене ручного труда в трудоемких процессах, а также при механизации процессов, требующих высокой квалификации от исполнителя. Одним из таких процессов, над автоматизацией которого работали на протяжении ряда лет многие конструкторы и изобретатели, является обработка штампов и прессформ, применяемых для изготовления деталей сложной конфигурации в условиях массового производства.
Металлорежущие станки обеспечивают изготовление деталей разнообразной формы, с высокой точностью размеров и заданной шероховатостью поверхности. Металлорежущие станки классифицируются по следующим признакам.
По степени специализации: 1-универсальные, применяемые для обработки деталей широкой номенклатуры; 2 - специализированные, предназначенные для обработки однотипных деталей, сходных по конфигурации, но имеющие различные размеры; 3 - специальные, применяемые для обработки деталей одного типоразмера.
Специализированные и специальные станки используют в крупносерийном и массовом производстве, а универсальные - в единичном и мелкосерийном производстве.
По точности: нормальной точности - класс Н; повышенной точности - класс П; высокой точности - класс В; особо высокой точности - класс А; прецизионные - класс С.
По массе: легкие - до 1 т, средние - до 10 т, тяжелые - свыше 10 т. Тяжелые станки в свою очередь делятся на крупные (от 10 до 30 т), тяжелые (от 30 до 100 т) и особо тяжелые (более 100 т).
металлорежущий станок обслуживание эксплуатация
По виду выполняемых работ и применяемых режущих инструментов все выпускаемые станки согласно классификации делят на девять групп, каждая группа разделена на десять типов станков.
Обозначение модели серийно выпускаемых станков состоит из сочетания трех или четырех цифр, иногда с добавлением букв. Первая цифра обозначает номер группы по классификационной таблице, вторая указывает тип станка. Третья, а иногда и четвертая цифра характеризуют параметры станка, которые различны для разных групп станков. Буквы указывают на модернизацию или модификацию основной базовой модели станка.
В моделях станков с программным управлением для обозначения степени автоматизации добавляется буква "Ф" с цифрой: Ф1-станки с цифровой индикацией и преднабором координат; Ф2 - станки с позиционными и прямоугольными системами; ФЗ - станки с контурными системами; Ф4 - станки с универсальной системой для позиционной и контурной обработки.
1.1Анализ конструкции современных металлорежущих станков
Многоцелевые станки должны быть простыми с точки зрения программирования процесса обработки деталей и полностью подготовленными к отгрузке клиенту. А система ценообразования/финансирования должна устраивать широкий круг компаний, включая и небольшие фирмы.
В настоящее время работа по созданию новых многоцелевых станков продолжается по нескольким направлениям:
развитие строительства вертикальных многоцелевых станков, приспособленных для обслуживания операторами с минимальной учебной подготовкой - постоянное улучшение системы управления станком;
создание системы перемещения поддонов, стирающей разницу между обработкой мелких и крупных деталей;
увеличение скорости шпинделя;
разработка программного обеспечения с повышенным уровнем сложности рабочих операций;
возможность работы на станке для человека с начальным уровнем учебной подготовки.
Назначение станка
Станки высокой точности предназначены для обработки сложных корпусных деталей средних размеров с 4-х сторон без переустановок из стали, чугуна, цветных металлов, пластмасс и других материалов.
1.3Технические характеристики станка
Размеры рабочей поверхности стола (палеты), мм 400х500
Наибольшие программируемые перемещения по X,Y,Z, мм 500, 500, 500
Конус шпинделя 50
Ёмкость инструментального магазина, штук 30
Наибольший диаметр инструмента без/с пропуском гнёзд 160/210
Время смены инструмента ("от реза до реза"), с 4
Пределы частот вращения шпинделя, мин-1 20.2500
Пределы частот вращения стола, мин-1 10
Пределы рабочих подач по X, Y, Z, мм/мин 1 … 10000
Скорость быстрых перемещений по X,Y,Z, м/мин 10
Наибольшие усилия подачи по X,Y,Z, кН 10
Мощность привода главного движения, кВт 6,3
Габарит станка (длина х ширина х высота), мм 3470 х 3905 х 3025
1.5Основные узлы станка
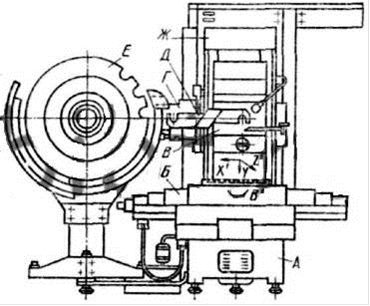
Рис.1.4 Основные узлы станка
Станок имеет горизонтальную компоновку. На основании А (рис.1.4) смонтирована колонна Ж, по вертикальным направляющим которой перемещается шпиндельная головка В (подача по координате Y). Шпиндельная головка размещена в нише колонны, в результате исключается консольное расположение шпинделя; для повышения жесткости шпиндель не имеет осевого перемещения. По горизонтальным направляющим основания перемещается крестовый поворотный стол Б, осуществляющий продольное и поперечное перемещение по координатам X' и Z', а также поворот вокруг вертикальной оси В'. На колонне размещен механизм смены инструмента, состоящий из магазина Е, перегружателя Г и автооператора Д.
1.5Виды движения в станке
Главное движение шпиндель получает от электродвигателя (N = 6,3 кВт, n = 1000 мин-1) через передачи z = 35-35и блок, обеспечивающий получение двух диапазонов частот вращения. Подключение блока осуществляется электродвигателем типа РД-09 (N=10 к Вт, n=1200 мин-1) со встроенным редуктором через передачу z= 18-50 и систему рычагов. Положение блока контролирует микропереключатель.
Инструмент затягивается в конус шпинделя пакетом тарельчатых пружин через шток. Отжим инструмента для его замены происходит от отдельного асинхронного электродвигателя через систему зубчатых колес. Контроль отжима инструмента производится микропереключателями.
Приводы подач продольного и поперечного перемещения стола и его поворота, а также вертикального перемещения шпиндельной головки конструктивно выполнены одинаково. От электродвигателей постоянного тока с тиристорным управлением (N = 900 Вт, n=2200 мин-1) через двух - или трехступенчатый прямозубый редуктор движение передается соответственно транспортным винтам продольного перемещения салазок, поперечного перемещения стола, вертикального перемещения головки и шлицевому валу поворота стола.
1.6Конструктивные особенности станка
Станки с ЧПУ обеспечивают высокую производительность и точность отработки перемещений, задаваемых программой, а также сохранение этой точности в заданных пределах при длительной их эксплуатации. Станки с ЧПУ имеют расширенные технологические возможности при сохранении высокой надежности работы.
Конструкция станков с ЧПУ должна, как правило, обеспечить совмещение различных видов обработки (точение - фрезерование, фрезерование - шлифование, обработка резанием - контроль и т.д.), удобство загрузки заготовок, выгрузки деталей, что особенно важно при применении промышленных роботов, автоматическое или дистанционное управление сменой инструмента, возможность встройки в общую автоматическую систему управления.
Повышение точности обработки достигается высокой точностью изготовления и жесткостью станка, превышающей жесткость обычного станка того же назначения. Статическая и динамическая жесткость повышается при сокращении длины кинематических цепей. С этой целью для всех рабочих органов применяют автономные приводы, а механические передачи используют в минимально возможном количестве. Приводы станков с ЧПУ должны обеспечивать высокое быстродействие.
Повышению точности способствует также устранение зазоров в передаточных механизмах приводов подач, снижение потерь на трение в направляющих и других механизмах, повышение виброустойчивости, снижение тепловых деформаций, применение в станках датчиков обратной связи. Для уменьшения тепловых деформаций необходимо обеспечить равномерный температурный режим в механизмах станка, чему, например, способствует предварительный разогрев станка и гидросистемы. В высокоточных станках температурную погрешность можно в некоторой степени уменьшить, вводя коррекцию в привод подач от сигналов датчиков температур.
2. Расчет базовых элементов станка
Несущие системы станков должны обеспечивать и сохранять в течение срока службы станка возможность обработки с заданными режимами и требуемой точностью. Исходя из этого, основными критериями работоспособности несущей системы являются жесткость, а также виброустойчивость в смысле обеспечения возможности устойчивой работы станка при заданных режимах и ограничения уровня амплитуд вынужденных колебаний допустимыми пределами.
Металлорежущие станки должны обеспечивать возможность высокопроизводительного изготовления без последующей ручной доводки деталей, удовлетворяющих современным непрерывно возрастающим требованиям к точности. Поэтому проектирование станков и их наиболее ответственных деталей и механизмов, в частности, деталей несущей системы, в значительной степени подчиняется критерию точности. К этому критерию относятся: точность изготовления, сохранение точности в работе (обеспечиваемое малостью приведенных упругих, температурных деформаций и амплитуд колебаний) и сохранение точности за установленные межремонтные периоды (обеспечиваемое малым износом и короблением от остаточных напряжений).
Несущая система станка образуется совокупностью элементов станка, через которые замыкаются силы, возникающие между инструментом и заготовкой в процессе резания.
2.1Обоснование вида направляющих станка и выбор материала
В станке применяют направляющие скольжения из серого чугуна, выполненные как одно целое с базовой деталью, наиболее просты, но при интенсивной работе не обеспечивают необходимой долговечности. Их износостойкость повышают закалкой с нагревом токами высокой частоты или газопламенным методом. Закалкой одной из сопряженных поверхностей до HRCa 48-53 можно повысить износостойкость более чем в 2 раза. Легирующие присадки к чугунным направляющим дают повышение износостойкости только при последующей закалке. Значительного повышения износостойкости чугунных направляющих можно добиться применением специальных покрытий.
По форме поперечного сечения трапециевидные (типа ласточкина хвоста) направляющие.
2.2Обоснование конструкции основных базовых элементов и выбор материала

Рис.2 Общий вид
Станок имеет горизонтальную компоновку. На основании смонтирована колонна, по вертикальным направляющим которой перемещается шпиндельная головка (подача по координате Y). Шпиндельная головка размещена в нише колонны, в результате исключается консольное расположение шпинделя; для повышения жесткости шпиндель не имеет осевого перемещения. По горизонтальным направляющим основания перемещается крестовый поворотный стол, осуществляющий продольное и поперечное перемещение по координатам X' и Z', а также поворот вокруг вертикальной оси. На колонне размещен механизм смены инструмента, состоящий из магазина, перегружателя и автооператора.
Движения резания
Движение резания осуществляется от регулируемого электродвигателя.
В результате переключения муфт М1, М2, М3 и блоков Б1 и Б2 шпиндель имеет 36 теоретических и 23 практических значения частот вращения. Уравнение кинематического баланса для минимальной частоты вращения шпинделя: nmin = 1600 ∙ 32/40 ∙ 18/72 ∙ 19/60 ∙ 19/61 ∙ 20/86 = 10 мин-1
Движения подач
Движение подач и поворот стола осуществляется от высокомоментных электродвигателей постоянного тока М2, М3, М4, М5, М6. Вращение ходовых винтов непосредственно от высокомоментных электродвигателей постоянного тока исключает длинные кинематические цепи, обеспечивая таким образом высокую точность перемещений и гибкость в управлении подачей, что необходимо для контурной обработки деталей.
smin= 
Вспомогательные движения
Колесо z = 24 на валу XIII передает движение или на поперечную подачу стола или на его поворот. Перемещение колеса z = 24 производится двигателем М6 типа РД-09 (N = 10 Вт, n = 1200 мин-1) со встроенным редуктором, а контролируется положение колеса z = 24 микропереключателями.
Стол, салазки и шпиндельная головка, горизонтального фрезерно-сверлильно-расточного станка 2204ВМФ2, перемещаются по замкнутым направляющим качения с предварительным натягом. Ручное перемещение подвижных органов осуществляют через квадраты на соответствующих валах. Зажим поступательно перемещающихся рабочих органов осуществляется путем торможения транспортных винтов. На каждом ходовом винте закреплен стальной диск, проходящий между прижимными пластинами механизма зажима. Зажим осуществляется тарельчатыми пружинами через тягу, пластины. При отжиме эксцентриковый вал, приводимый во вращение электродвигателем, отжимает пакет тарельчатых пружин. Микропереключатели, контролирующие зажим и отжим, включаются кулачком через рычаг.
Требования техники безопастности и экологии при работе станка
1. Масса и габаритные размеры обрабатываемых заготовок должны соответствовать паспортным данным станка.
. При обработке заготовок массой более 16 кг устанавливать и снимать с помощью грузоподъемных устройств, причем не допускать превышения нагрузки, установленной для них. Для перемещения применять специальные строповочно-захватные приспособления. Освобождать обработанную деталь от них только после надежной укладки, а при установке - только после надежного закрепления на станке.
. При необходимости пользоваться средствами индивидуальной защиты. Запрещается работать в рукавицах и перчатках, а также с забинтованными пальцами без резиновых напальчников, на станках с вращающимися обрабатываемыми заготовками или инструментами.
. Перед каждым включением станка убедиться, что его пуск ни для кого не опасен; постоянно следить за надежностью крепления станочного приспособления, обрабатываемой заготовки, а также режущего инструмента.
. При работе станка не переключать рукоятку режимов работы, измерений, регулировки и чистки. Не отвлекаться от наблюдения за ходом обработки самому и не отвлекать других.
. Если в процессе обработки образуется отлетающая стружка, установить переносные экраны для защиты окружающих и при отсутствии на станке специальных защитных устройств надеть защитные очжи или предохранительный щиток из прозрачного материала. Следить за своевременным удалением стружки как со станка, так и с рабочего места, остерегаться наматывания стружки на заготовку или инструмент, не удалять стружку руками, а пользоваться для этого специальными устройствами; запрещается с этой целью обдувать сжатым воздухом обрабатываемую заготовку и части станка.
. Правильно укладывать обработанные детали, не загромождать подходы к станку, периодически убирать стружку и следить за тем, чтобы пол не был залит охлаждающей жидкостью и маслом, обращая особое внимание на недопустимость попадания; их на решетку под ноги.
. При использовании для привода станочных приспособлений сжатого воздуха следить за тем, чтобы отработанный воздух отводился в сторону от станочника.
. Постоянно осуществлять контроль за устойчивостью отдельных деталей или штабелей деталей на местах складирования, а при размещении деталей в таре обеспечивать устойчивое положение их, а также самой тары. Высота штабелей не должна превышать для мелких деталей 0,5 м, для средних - 1м, для крупных - 1,5 м.
. Обязательно выключать станок при уходе даже на короткое время, при перерывах в подаче электроэнергии или сжатого воздуха, при измерении обрабатываемой детали, а также при регулировке, уборке и смазывании станка.
. При появлении запаха горящей электроизоляции или ощущения действия электрического тока при соприкосновении с металлическими частями станка немедленно остановить станок и вызвать мастера. Не открывать дверцы электрошкафов и не производить какую-либо регулировку электроаппаратуры.
Режущий инструмент
Заключение
В процессе изучения многоцелевого станка 2204ВМФ2 были рассмотрены его технологические возможности, технические характеристики, способы крепления заготовки и инструмента, устройство и принцип действия станка. А так же была рассмотрена кинематическая схема, где показаны главное движение, движение подачи, радиальное перемещение суппорта, продольное перемещение стола и другие.
В дальнейшем был расчет количества зубьев и определение знаменателя геометрического ряда, расчет частот вращения каждой ступени, выбор оптимального варианта структурной сетки и построение графика частот вращения.
Так же была изучена техника безопасности при работе на данном станке. Сюда входят правила эксплуатации и технического обслуживания станка, установка заготовок и зажимных приспособлений, приемы работы. И самое главное были изучены основные правила безопасной эксплуатации металлообрабатывающих станков для рабочих всех профессий.
Литература
1. Кочергин А.И. Расчет, конструирование металлорежущих станков и станочных комплексов. "Вышэйшая школа", 1991 г.
. Металлорежущие станки (альбом общих видов, кинематических схем и узлов). Кучер А.М., Киватицкий М.М., Покровский А.А. Изд-во "Машиностроение", 1971, стр.308. табл.1.
. Металлорежущие станки. Колл. авторов под ред. проф.В.К. Тепинкичиева.М., "Машиностроение", 1973, 472 с.
. Паспорт станка 2204ВМФ2
. Сергель Н.Н. Металлорежущие станки: Курс лекций/ Н.Н. Сергель. - Барановичи: БарГУ, 2006. - 360 с.
. Чернов И.А. Металлорежущие станки - 3-е издание, переработанное и дополненное, М: Машиностроение, 1978 - 2003 г.
Содержание
Введение
1. Общие сведения о металлорежущих станках
1.1 Анализ конструкции современных металлорежущих станков
1.2 Назначение станка
1.3 Технические характеристики станка
1.5 Основные узлы станка
1.5 Виды движения в станке
1.6 Конструктивные особенности станка
2. Расчет базовых элементов станка
2.1 Обоснование вида направляющих станка и выбор материала
2.2 Обоснование конструкции основных базовых элементов и выбор материала
3. Кинематический анализ станка
3.1 Описание кинематической схемы станка
3.2 Движения резания
3.3 Движения подач
3.4 Вспомогательные движения
4. Указания по эксплуатации и обслуживанию станка
5. Требования техники безопастности и экологии при работе станка
6. Обоснование экономической эффективности станка
7. Режущий инструмент
7.1 Назначение режущего инструмента
7.2 Технические требования, предъявляемые к режущему инструменту
7.3 Элементы конструкции и геометрические параметры инструмента
Заключение
Литература
Введение
В эпоху научно-технической революции технический прогресс прежде всего связан с машиностроением, созданием новых, более совершенных и более производительных машин, механизмов и агрегатов, разработкой комплексов и систем, объединяющих в единое целое разнообразные машины и технические устройства.
Количественное и качественное развитие машиностроения в значительной степени зависит от станкостроения. Без развития станкостроения нельзя добиться широкого спектра развития производства, выпуска деталей, непрерывного технического прогресса, роста производительности труда.
Основными направлениями экономического и социального развития на 1986-1990 годы и на период до 2000 года в станкостроительной промышленности предусмотрено обеспечить опережающий выпуск металлорежущих станков с числовым программным управлением, станков типа "обрабатывающий центр", тяжелых и уникальных станков и прессов, оборудования для автоматизации сборки массовых изделий в машиностроении, роторных, роторно-конвейерных и других автоматических линий для машиностроения и металлообработки.
Целью моего курсового проекта является изучить горизонтальный многоцелевой станок с ЧПУ и АСИ и построение структурной сетки и графика частот вращения. Я выбрал модель 2204ВМФ2.
1.Общие сведения о металлорежущих станках
Развитие современной промышленности неразрывно связано с автоматизацией технологических процессов в самых разнообразных отраслях техники. Особенное значение имеет автоматизация при замене ручного труда в трудоемких процессах, а также при механизации процессов, требующих высокой квалификации от исполнителя. Одним из таких процессов, над автоматизацией которого работали на протяжении ряда лет многие конструкторы и изобретатели, является обработка штампов и прессформ, применяемых для изготовления деталей сложной конфигурации в условиях массового производства.
Металлорежущие станки обеспечивают изготовление деталей разнообразной формы, с высокой точностью размеров и заданной шероховатостью поверхности. Металлорежущие станки классифицируются по следующим признакам.
По степени специализации: 1-универсальные, применяемые для обработки деталей широкой номенклатуры; 2 - специализированные, предназначенные для обработки однотипных деталей, сходных по конфигурации, но имеющие различные размеры; 3 - специальные, применяемые для обработки деталей одного типоразмера.
Специализированные и специальные станки используют в крупносерийном и массовом производстве, а универсальные - в единичном и мелкосерийном производстве.
По точности: нормальной точности - класс Н; повышенной точности - класс П; высокой точности - класс В; особо высокой точности - класс А; прецизионные - класс С.
По массе: легкие - до 1 т, средние - до 10 т, тяжелые - свыше 10 т. Тяжелые станки в свою очередь делятся на крупные (от 10 до 30 т), тяжелые (от 30 до 100 т) и особо тяжелые (более 100 т).
металлорежущий станок обслуживание эксплуатация
По виду выполняемых работ и применяемых режущих инструментов все выпускаемые станки согласно классификации делят на девять групп, каждая группа разделена на десять типов станков.
Обозначение модели серийно выпускаемых станков состоит из сочетания трех или четырех цифр, иногда с добавлением букв. Первая цифра обозначает номер группы по классификационной таблице, вторая указывает тип станка. Третья, а иногда и четвертая цифра характеризуют параметры станка, которые различны для разных групп станков. Буквы указывают на модернизацию или модификацию основной базовой модели станка.
В моделях станков с программным управлением для обозначения степени автоматизации добавляется буква "Ф" с цифрой: Ф1-станки с цифровой индикацией и преднабором координат; Ф2 - станки с позиционными и прямоугольными системами; ФЗ - станки с контурными системами; Ф4 - станки с универсальной системой для позиционной и контурной обработки.
1.1Анализ конструкции современных металлорежущих станков
Многоцелевые станки должны быть простыми с точки зрения программирования процесса обработки деталей и полностью подготовленными к отгрузке клиенту. А система ценообразования/финансирования должна устраивать широкий круг компаний, включая и небольшие фирмы.
В настоящее время работа по созданию новых многоцелевых станков продолжается по нескольким направлениям:
развитие строительства вертикальных многоцелевых станков, приспособленных для обслуживания операторами с минимальной учебной подготовкой - постоянное улучшение системы управления станком;
создание системы перемещения поддонов, стирающей разницу между обработкой мелких и крупных деталей;
увеличение скорости шпинделя;
разработка программного обеспечения с повышенным уровнем сложности рабочих операций;
возможность работы на станке для человека с начальным уровнем учебной подготовки.
Назначение станка
Станки высокой точности предназначены для обработки сложных корпусных деталей средних размеров с 4-х сторон без переустановок из стали, чугуна, цветных металлов, пластмасс и других материалов.
1.3Технические характеристики станка
Размеры рабочей поверхности стола (палеты), мм 400х500
Наибольшие программируемые перемещения по X,Y,Z, мм 500, 500, 500
Конус шпинделя 50
Ёмкость инструментального магазина, штук 30
Наибольший диаметр инструмента без/с пропуском гнёзд 160/210
Время смены инструмента ("от реза до реза"), с 4
Пределы частот вращения шпинделя, мин-1 20.2500
Пределы частот вращения стола, мин-1 10
Пределы рабочих подач по X, Y, Z, мм/мин 1 … 10000
Скорость быстрых перемещений по X,Y,Z, м/мин 10
Наибольшие усилия подачи по X,Y,Z, кН 10
Мощность привода главного движения, кВт 6,3
Габарит станка (длина х ширина х высота), мм 3470 х 3905 х 3025
1.5Основные узлы станка
Рис.1.4 Основные узлы станка
Станок имеет горизонтальную компоновку. На основании А (рис.1.4) смонтирована колонна Ж, по вертикальным направляющим которой перемещается шпиндельная головка В (подача по координате Y). Шпиндельная головка размещена в нише колонны, в результате исключается консольное расположение шпинделя; для повышения жесткости шпиндель не имеет осевого перемещения. По горизонтальным направляющим основания перемещается крестовый поворотный стол Б, осуществляющий продольное и поперечное перемещение по координатам X' и Z', а также поворот вокруг вертикальной оси В'. На колонне размещен механизм смены инструмента, состоящий из магазина Е, перегружателя Г и автооператора Д.
1.5Виды движения в станке
Главное движение шпиндель получает от электродвигателя (N = 6,3 кВт, n = 1000 мин-1) через передачи z = 35-35и блок, обеспечивающий получение двух диапазонов частот вращения. Подключение блока осуществляется электродвигателем типа РД-09 (N=10 к Вт, n=1200 мин-1) со встроенным редуктором через передачу z= 18-50 и систему рычагов. Положение блока контролирует микропереключатель.
Инструмент затягивается в конус шпинделя пакетом тарельчатых пружин через шток. Отжим инструмента для его замены происходит от отдельного асинхронного электродвигателя через систему зубчатых колес. Контроль отжима инструмента производится микропереключателями.
Приводы подач продольного и поперечного перемещения стола и его поворота, а также вертикального перемещения шпиндельной головки конструктивно выполнены одинаково. От электродвигателей постоянного тока с тиристорным управлением (N = 900 Вт, n=2200 мин-1) через двух - или трехступенчатый прямозубый редуктор движение передается соответственно транспортным винтам продольного перемещения салазок, поперечного перемещения стола, вертикального перемещения головки и шлицевому валу поворота стола.
1.6Конструктивные особенности станка
Станки с ЧПУ обеспечивают высокую производительность и точность отработки перемещений, задаваемых программой, а также сохранение этой точности в заданных пределах при длительной их эксплуатации. Станки с ЧПУ имеют расширенные технологические возможности при сохранении высокой надежности работы.
Конструкция станков с ЧПУ должна, как правило, обеспечить совмещение различных видов обработки (точение - фрезерование, фрезерование - шлифование, обработка резанием - контроль и т.д.), удобство загрузки заготовок, выгрузки деталей, что особенно важно при применении промышленных роботов, автоматическое или дистанционное управление сменой инструмента, возможность встройки в общую автоматическую систему управления.
Повышение точности обработки достигается высокой точностью изготовления и жесткостью станка, превышающей жесткость обычного станка того же назначения. Статическая и динамическая жесткость повышается при сокращении длины кинематических цепей. С этой целью для всех рабочих органов применяют автономные приводы, а механические передачи используют в минимально возможном количестве. Приводы станков с ЧПУ должны обеспечивать высокое быстродействие.
Повышению точности способствует также устранение зазоров в передаточных механизмах приводов подач, снижение потерь на трение в направляющих и других механизмах, повышение виброустойчивости, снижение тепловых деформаций, применение в станках датчиков обратной связи. Для уменьшения тепловых деформаций необходимо обеспечить равномерный температурный режим в механизмах станка, чему, например, способствует предварительный разогрев станка и гидросистемы. В высокоточных станках температурную погрешность можно в некоторой степени уменьшить, вводя коррекцию в привод подач от сигналов датчиков температур.
2. Расчет базовых элементов станка
Несущие системы станков должны обеспечивать и сохранять в течение срока службы станка возможность обработки с заданными режимами и требуемой точностью. Исходя из этого, основными критериями работоспособности несущей системы являются жесткость, а также виброустойчивость в смысле обеспечения возможности устойчивой работы станка при заданных режимах и ограничения уровня амплитуд вынужденных колебаний допустимыми пределами.
Металлорежущие станки должны обеспечивать возможность высокопроизводительного изготовления без последующей ручной доводки деталей, удовлетворяющих современным непрерывно возрастающим требованиям к точности. Поэтому проектирование станков и их наиболее ответственных деталей и механизмов, в частности, деталей несущей системы, в значительной степени подчиняется критерию точности. К этому критерию относятся: точность изготовления, сохранение точности в работе (обеспечиваемое малостью приведенных упругих, температурных деформаций и амплитуд колебаний) и сохранение точности за установленные межремонтные периоды (обеспечиваемое малым износом и короблением от остаточных напряжений).
Несущая система станка образуется совокупностью элементов станка, через которые замыкаются силы, возникающие между инструментом и заготовкой в процессе резания.
2.1Обоснование вида направляющих станка и выбор материала
В станке применяют направляющие скольжения из серого чугуна, выполненные как одно целое с базовой деталью, наиболее просты, но при интенсивной работе не обеспечивают необходимой долговечности. Их износостойкость повышают закалкой с нагревом токами высокой частоты или газопламенным методом. Закалкой одной из сопряженных поверхностей до HRCa 48-53 можно повысить износостойкость более чем в 2 раза. Легирующие присадки к чугунным направляющим дают повышение износостойкости только при последующей закалке. Значительного повышения износостойкости чугунных направляющих можно добиться применением специальных покрытий.
По форме поперечного сечения трапециевидные (типа ласточкина хвоста) направляющие.
2.2Обоснование конструкции основных базовых элементов и выбор материала
Рис.2 Общий вид
Станок имеет горизонтальную компоновку. На основании смонтирована колонна, по вертикальным направляющим которой перемещается шпиндельная головка (подача по координате Y). Шпиндельная головка размещена в нише колонны, в результате исключается консольное расположение шпинделя; для повышения жесткости шпиндель не имеет осевого перемещения. По горизонтальным направляющим основания перемещается крестовый поворотный стол, осуществляющий продольное и поперечное перемещение по координатам X' и Z', а также поворот вокруг вертикальной оси. На колонне размещен механизм смены инструмента, состоящий из магазина, перегружателя и автооператора.
Кинематический анализ станка






