По способу поворота
· Неповоротные
· Свободноповоротные, вращющиеся совместно с грузозахватным органом под действием усилий строповщика инерционных или ветровых нагрузок
4) Принудительно поворотные, вращающиеся специальным приводным механизмом, встроенным в грузозахватное приспособление и управляемым машинистом.
1. Роль грузозахватных и такелажных устройств на подъемно-транспортных, погрузочно-разгрузочных и складских работах.
Погрузочно-разгрузочные операции производительных процессов занимают важное место. На подъемно-транспотрных и складских работах производительность труда определяется наличием высокоэффективных грузозахватных устройств.
Грузозахватное устройство предназначено для подвешивания, захватывания и удержания груза при подъеме и перемещении его грузоподъемными машинами в процессе выполнения подъемно-транспортных работ.
5) Статические и динамические нагрузки на ГУ. Коэффициент динамичности. Основные требования к конструкции ГУ с точки зрения безопасности их использования.
СТАТИЧЕСКИЕ
Когда грузозахватное устройство, удерживающее груз неподвижно или перемещается с постоянной скоростью по прямолинейному пути на него действует статическая нагрузка. Возможно различное взаимоположение грузозахватного устройства и груза.
1) Центр тяжести груза совпадает с вертикальной осью подвеса грузозахватного устройства
 , где F – усилие, воспринимаемое грузозахватным устройством.
, где F – усилие, воспринимаемое грузозахватным устройством.
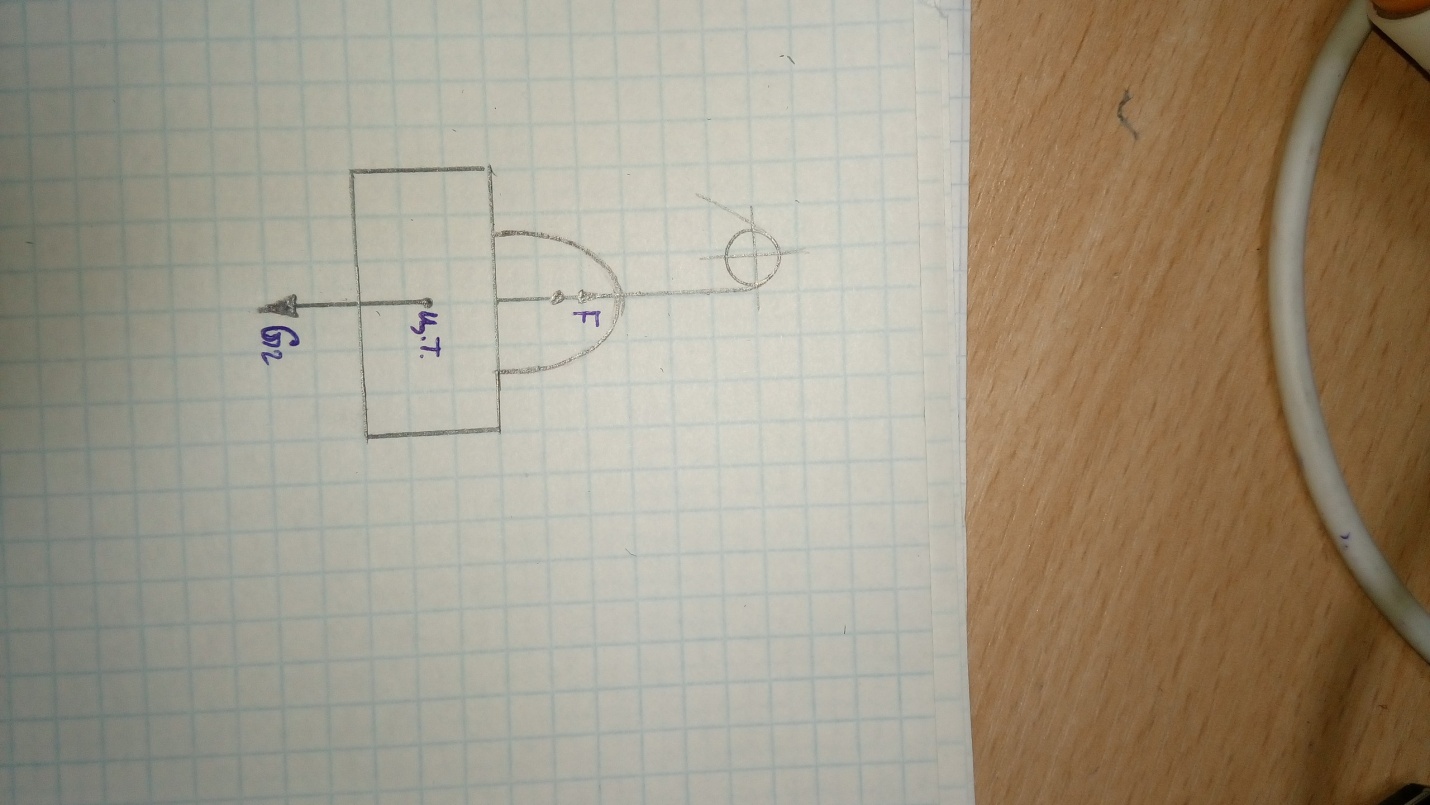
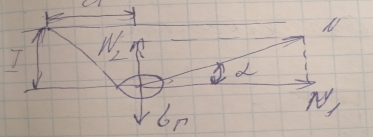
2) Центр тяжести не совпадает с осью подвеса грузозахватного устройства. Для этого случая характерно варианта:
а) Грузозахватное устройство может … в вертикальной плоскости относительно нижней точки подвеса

Усилие отрывающее груз от грузозахватного устройства будет определяться: 
А усилие сдвигающее груз относительно ГУ

б) ГУ может откланяться вместе с ветвью подвеса
 в – плечо общего ц.т.
в – плечо общего ц.т.
Действует момент от веса груза 
Усилие отрывающее груз 
Усилие сдвигающее груз 
Также необходимо учитывать момент от веса груза и ГУ

С учетом этого момента: 

ДИНАМИЧЕСКИЕ
Возникают в период неустановившегося движения при подъеме груза, передвижении беговой тележки, а также при ее повороте. При нормальном условии эксплуатации вертикальная динамическая нагрузка на ГУ имеет существенное значение только при работе механизма подъема. При работе механизмов передвижения и повороте она не превышает 5% от статической. Таким образом вертикальная динамическая нагрузка возникая в процессе подъема является основной при этом возможны 2 варианта:
1) Подъем с виса

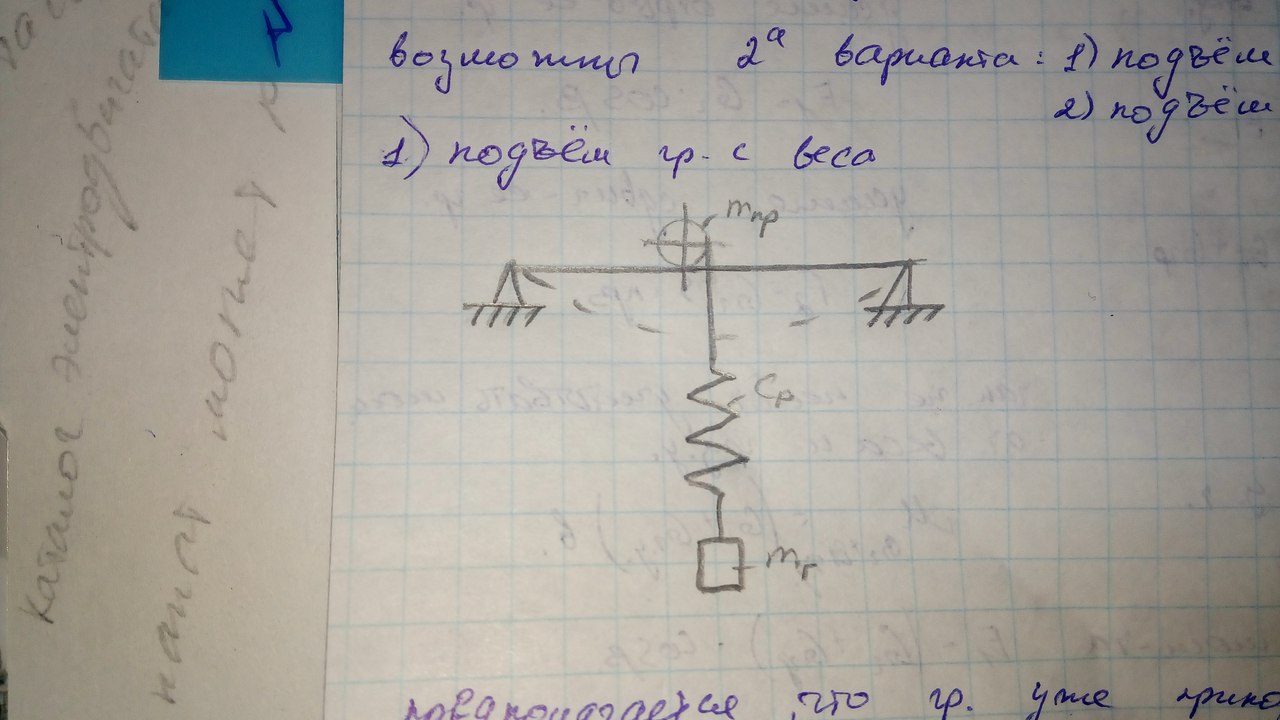
Предполагается, что груз уже приподнят и статическая нагрузка, действующая на ГУ равна весу груза. В начальный момент торможения опускающегося груза возникает динамическая нагрузка. Нагрузка на ГУ складывается из статической и динамической которая является функцией времени, ее развития и жесткости опорной конструкции.
 – нагрузка на ГУ
– нагрузка на ГУ
 – динамический коэффициент
– динамический коэффициент
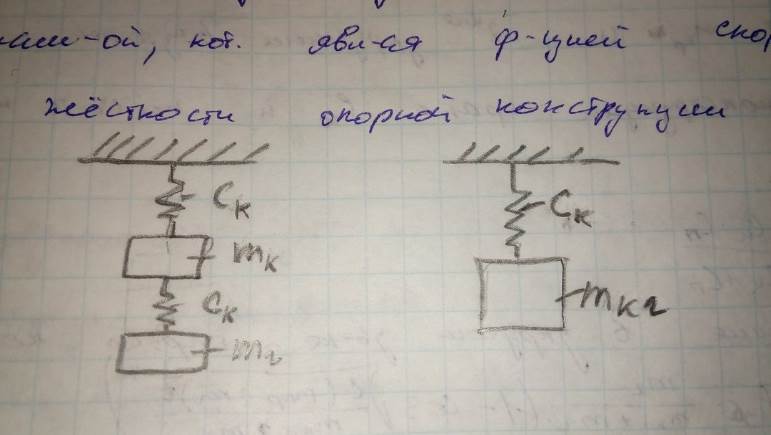
Расчетные схемы двухмассовой и трехмассовой систем
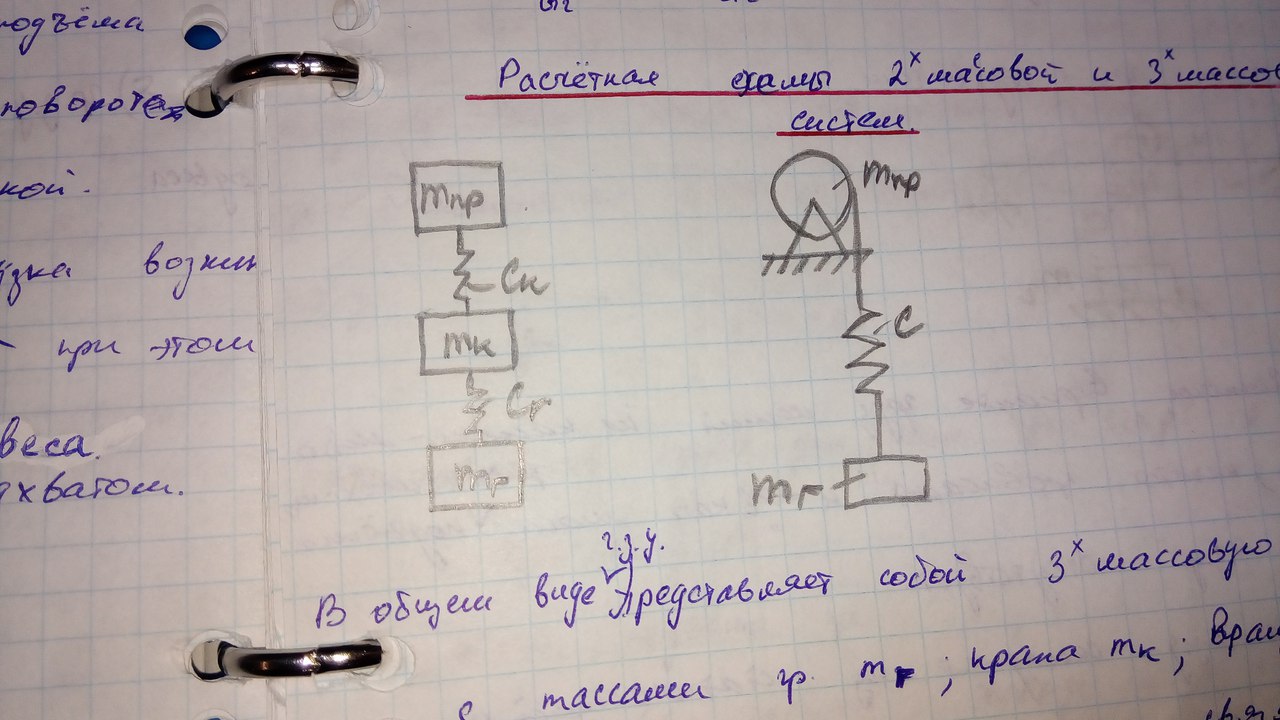
В общем виде ГУ представляет собой трехмассовую систему с массами груза  , крана
, крана  , вращающихся частей привода
, вращающихся частей привода  и двумя упругими связями, жесткость конструкции крана
и двумя упругими связями, жесткость конструкции крана  и жесткость каната подвески
и жесткость каната подвески  .
.

Усилие в упругом звене определяется по формуле:

 - избыточная сила двигателя
- избыточная сила двигателя
 - кожффициент пропорциональности
- кожффициент пропорциональности
 - максимальное значение усилия
- максимальное значение усилия
2) Подъем с подхватом
В данном варианте груз лежит на каком-либо основании, канаты провисают и следовательно в начальный момент работы механизм подъема нагрузки на ГУ отсутствует. Нагрузка на ГУ складывается из статической и динамической, которая является функцией скорости каната и жесткости опорной конструкции.
 Жесткостью каната можно пренебречь, и рассматриваются, как одна масса. При подъеме груза после включения двигателя вначале выбирается слабина каната, затем происходит упругая деформация элементов конструкции ГПМ. Это продолжается до тех пор пока усилие на ГУ возрастая от 0 не станет равным весу груза. После этого начинается собственно подъем груза.
Жесткостью каната можно пренебречь, и рассматриваются, как одна масса. При подъеме груза после включения двигателя вначале выбирается слабина каната, затем происходит упругая деформация элементов конструкции ГПМ. Это продолжается до тех пор пока усилие на ГУ возрастая от 0 не станет равным весу груза. После этого начинается собственно подъем груза.
Динамическая составляющая, действующая на ГУ: 
Максимальное значение динамической нагрузки при sint=-1: 
 - скорость подъема груза
- скорость подъема груза
 – круговая частота свободных колебаний
– круговая частота свободных колебаний
Полная нагрузка, действующая на ГУ

 – прогиб конструкции от статической нагрузки
– прогиб конструкции от статической нагрузки
Основные требования к конструкции ГУ с точки зрения безопасности их использования.
1. Грузозахватное приспособление должно соответствовать документации и своему назначению.
2. Должно находиться в исправном состоянии и обеспечивает безопасную работу
6) Строповые ГУ типы, устройство. Расчет стропов и звеньев строповых ГУ.
Основным элементом строповых гу является гибкие ветви и соединенные с ними захватные органы. По способу захвата груза: универсальные, обхватывающие груз гибкой ветвью каната; зацепляющие груз за имеющиеся на нем спец. захватные элементы; подхватывающие, строповые гзу могут подвешиваться на крюк крана непосредственно за гибкий элемент или при помощи соединительных звеньев.
Канатные стропы разделяются по количеству ветвей: одноветвивые(1СК); двухветвивые(2СК);трехветвивые(3СК);четырехветвивые(4СК);универсальные(УСК).
Цепные стропы: одноветвивые(1СЦ); двухветвивые(2СЦ); трехветвивые(3СЦ); четырехветвивые(4СЦ);универсальные(УСЦ); с двумя замкнутыми ветвями(СЦ2в3)
Ветви канатных стропов изготавливают из отрезков стропов каната  мм. На концах канатов заделывают коуши или петли в зависимости от назначения стропа. Свободные концы заплетают (г),соединяют зажимами (д) или гильзоклиновыми (е). Многоветвивые стропы предназначены для подъема и транспортировки груза за 2.3,4 точки (в,д). Широкое применение они получили для строповки элементов зданий снабженных петлями или проушинами. При использовании 4хветвивого стропа должна передаваться на все ветви равномерно. Цепные стропы по сравнению с канатными более гибкие и пригодны для подъема грузов с острыми ребрами. Они хорошо накладываются на груз и снимаются. Недостатки цепных строп: имеют большую массу; не допускают резких динамических нагрузок; внезапно рвутся; дефекты цепей трудно обнаружить.
мм. На концах канатов заделывают коуши или петли в зависимости от назначения стропа. Свободные концы заплетают (г),соединяют зажимами (д) или гильзоклиновыми (е). Многоветвивые стропы предназначены для подъема и транспортировки груза за 2.3,4 точки (в,д). Широкое применение они получили для строповки элементов зданий снабженных петлями или проушинами. При использовании 4хветвивого стропа должна передаваться на все ветви равномерно. Цепные стропы по сравнению с канатными более гибкие и пригодны для подъема грузов с острыми ребрами. Они хорошо накладываются на груз и снимаются. Недостатки цепных строп: имеют большую массу; не допускают резких динамических нагрузок; внезапно рвутся; дефекты цепей трудно обнаружить.
Расчет стропов
Расчет проводится с учетом числа ветвей и угла их наклона к вертикали.
Усилие возникающее в каждой ветви стропа 
 , при угле
, при угле  ; е=1;1,15;1,42
; е=1;1,15;1,42
 - угол наклона ветвей
- угол наклона ветвей
n – число ветвей
Разрывное усилие: 
 - коэффициент запаса прочности
- коэффициент запаса прочности
 - для неперегибающихся канатов,
- для неперегибающихся канатов,

Соединительные звенья бывают следующих типов: Разъемные треугольные (Р), Разъемные овальные ( ), Треугольные (Т), Овоидные (О), Овальные (Ов), Крюки с замком (К1), Крюки без замка (К2), Крюки с утопленным носом (К3), Карабины (Кр)
), Треугольные (Т), Овоидные (О), Овальные (Ов), Крюки с замком (К1), Крюки без замка (К2), Крюки с утопленным носом (К3), Карабины (Кр)
Звенья типов 1)-6) служат для навешивания стропов на грузозахватный орган ГПМ и для соединения частей стропов. Типы 7)-8) для соединения ГУ со специальными приспособлениями на грузе.
Расчет нестандарстых звеньев:
Расчет сводится к подбору их сечений с обеспеченным запасом прочности на растяжение и изгиб.
Запас прочности на растяжение: 
Запас прочности на изгиб: 
 - временное сопротивление разрыву
- временное сопротивление разрыву
 – напряжение растяжения
– напряжение растяжения
 - предел текучести при изгибе
- предел текучести при изгибе
 - напряжение изгиба
- напряжение изгиба
Напряжение растяжения в прямолинейных частях

F – усилие ветви стропа
 - угол наклона стержня звена к оси перпендикулярной направлению усилия
- угол наклона стержня звена к оси перпендикулярной направлению усилия
А – площадь поперечного сечения стержня
Напряжение изгиба в крайних волокнах поперечного сечения звена:
1) Для внутреннего волокна 
2) Для наружного волокна 
 – изгибающий момент
– изгибающий момент
 - ординаты внутреннего и наружного волокна поперечного сечения звена
- ординаты внутреннего и наружного волокна поперечного сечения звена
r – радиус кривизны центральной оси
 - момент инерции площади поперечного сечения звена
- момент инерции площади поперечного сечения звена
6. Цепные стропы подлежат браковке при увеличении звена более 3% от первоначального размера и при уменьшении d сечения звена вследствие износа на 10%. Браковка колец, петель и крюковых съемных гзу производится: при наличии трещин; при износе поверхностей элементов или местных вмятин, приводящих к уменьшению площади поперечного сечения на 10%; при наличии остаточных деформаций, приводящих к изменению первоначального размера элемента более чем на 5%.
Канатные стропы: обрыв 1 или более прядей каната; корзинообаазные деформации; выдавливание сердечника; выдавливание или расслоение прядей; местное увеличение или уменьшение диаметра каната; повреждения появившихся в результате температурных воздействий или электрического дугового разряда; признаках смещения канатов в защелках или втулках; число видимых обрывов наружных проволок превышает значения 
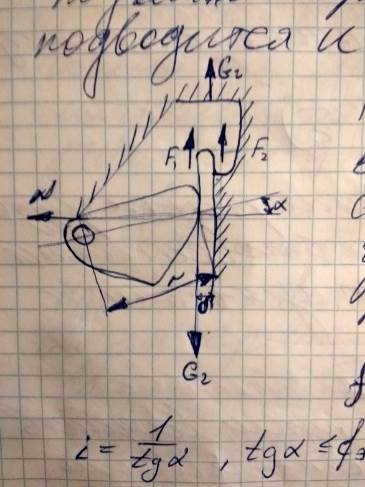
7. Основное требование к конструкции вилочных гзу: обеспечить расположение центра тяжести груза на одной вертикали с точкой подвеса, что предотвращает самопроизвольное спадание груза с лап. По способу подведения лап различают: с неповоротными лапами, горизонтально поворотными, вертикально поворотными.
Поворотные лапы могут быть выполнены в виде коромысла(коромысловые гзу). Расположеение лап у неповоротных и горизонтально поворотных может быть несимметричным, у ветикально поворотных оно симметричное. По числу лап: 1-,2-,многолапчатые.
Однолапчатые вертикально поворотные и коромысловые выполняются без уравновешивания стабилизации устойчивости груза. Горизонтально поворотные имеют уравновешивающие устройства виде груза или пружины. Управление поворотом лап или вил может быть ручным, дистанционным, автоматическим и полуавтоматическим. Вилочные гор.пов.: приспособление состоит из из 2 вил-1 жестко закрепленных на соединенных между собой балках-2, к плечу-3 шарнирно прикреплен канат-4, тяга-9. Канат-4 соединен серьгой-7 с канатом-8. На серьге-7 шарнирно закреплен балансир-5 с противовесом-6. В порожном состоянии гзу весит на тягах-9, канат-4 ослаблен. Вилочные гор.пов. с полуатоматическим поворотом вил: 2 поворотных вил-1 прикреплены шарнирно на тягах-2и3 к поворачивающим устройствам, основу которых составляют сварные корпуса-4 и связывающая их балка-5. В корпусах имеется прорезь-6. В прорези размещается валик-7, тяги-8, связывающие поворачивающие устройства с траверсой-9. Балка-5 обеспечивает синхронность движения обоих поворотных устройств. Лапчатые вертик.пов. с ручным приводом поворота: состоит из прямоугольной рамы-6 со скобой-5 для навешивания на подъемный механизм, и полых стоек-3 с поворотными захватными органами. Телескопические штанги -2 снабжены в нижних частях обхватными лапами-1. Верхние части штанг связаны между собой общим цепным приводом. На стойках закреплены под углом 90 др. относительно др. ограничители-9 и 10 поворота валов. Лапчатые вертик. Пов. С гидрофицированным приводом поворота: служит для перегрузки тяжелых труб большого диаметра.
8. Расчет включает решение 2 проблем: 1)предупредить соскальзывание груза при его транспортировании 2) обеспечить необходимую прочность элементов.
1) Соскальзывание может произойти под действием силы сдвига, которая достигает max значения при внезапном торможении. При наклоне лап вперед сила сдвига будет равна 
 коэф тения скольжения между вилами и грузом, -угол наклона лап вперед. При торможении
коэф тения скольжения между вилами и грузом, -угол наклона лап вперед. При торможении  .
.  -ускорение замедления при торможении. Условие несоскальзывания груза при резком торможении
-ускорение замедления при торможении. Условие несоскальзывания груза при резком торможении  . Ограничивающим фктором предотвращающим соскальзывание груза является наклон лап назад (
. Ограничивающим фктором предотвращающим соскальзывание груза является наклон лап назад ( . Для обеспечения горизонтального положения лап без груза и заданного наклона их с грузом гзу уравновешиваются. Вес противовеса
. Для обеспечения горизонтального положения лап без груза и заданного наклона их с грузом гзу уравновешиваются. Вес противовеса  .
.  абсцисы центра тяжести груза, гзу, противовеса,
абсцисы центра тяжести груза, гзу, противовеса,  -расстояние между центром тяжести гзу и точкой его противовесом,
-расстояние между центром тяжести гзу и точкой его противовесом,  -угол наклона груза.
-угол наклона груза.
2) Расчет на прочность основывается на том, что наиболее напряженным элементом является спинка лапы. При сдвоенных лапах возможны нагружения одной из них  от веса груза. При расчете на прочность вес гзу не учитывается. Изгиб. мом. И напряжения в сечениях вил: Сечение А-А:
от веса груза. При расчете на прочность вес гзу не учитывается. Изгиб. мом. И напряжения в сечениях вил: Сечение А-А: 

Сечение Б-Б:  Fl
Fl 
Сечение В-В:  Fb
Fb 
Сечение Г-Г:  Fс
Fс 
Сечение Д-Д:  Fс
Fс  Сечение Е-Е:
Сечение Е-Е:  Fd
Fd 
A и W-площади и мом. сопротивлений, К-коэф. учитывающий кривизну балки.
Расчет производится при углах перекоса поддона  . Если
. Если  , то необходимо дополнительно рассчитать элементы гзу на изгиб и кручение от сил перекоса.
, то необходимо дополнительно рассчитать элементы гзу на изгиб и кручение от сил перекоса.
9. Гзу для контейнеров могут быть г.з. органами специальных контейнерных кранов или съемными г.з. приспособлениями кранов общего назначения. Они классифицируются по признакам: По типу гзу могут быть оборудованы рым-болтами, проушинами, скобами, фитингами. Фитинги разещают повсем углам крнтейнера, используются как опоры при их штабилировании и как гнезда для водоконцевых звеньев гзу. По универсальности могут быть приспособлены для переработки: одного типа размера контейнеров; нескольких типов размеров с одинаковыми захватами; нескольких типов размеров с разными захватными устройствами. По типу привода: с ручным приводом; бесприводные с циклическим механизмом управления захватами; приводные. По степени механизации и автоматизации операций захватывания и освобождения: с ручной строповной и расстроповной; с механическим освобождением (полуавтоматические); с механическим захватыванием и освобождением контейнера; с автоматическим захватыванием и освобождением. По способу наводки гзу: с зонной наводкой(не требуется точная установка гзу на контейнере); с точечной наводкой (требуется точная ориентация гзу на контейнере). Гзу со сменными рамами для захвата контейнеров разных типов и размеров приспособлены для захвата одного или нескольких видов контейнеров.
10. Зажимные ГУ. Они приспособлены для автоматизации и механизации погрузочных работ. Применяются в качестве грузозахв. органа металлургических кранов, а также в качетве навесных ГП, кранов общего назначения. В зависимости от способа захвата их разделяют на опорно-клещевые и фрикционно-зажимные. Зажимные разделяются на рычажно-клещевые, кулисно-зажимные, канатно-рычажные, эксцентриковые, клиновые, надувные.
11. Опорные клещевые ГУ применяются для транспортирования перегрузки и транспортировке труб, строительных изделий и технологического оборудования. Подразделяются на: для транспортировки рельсов, сдвоенные на траверсы, сдвоенные на траверсе для труб, с защелкой для стабилизации рычагов в открытом положении, с фрикционным рычагом для грузов с отверстиями. Во фрикционно-зажимных грузозахватных устройствах груз удерживается силой трения, возникающей от его сжатия или распора прижимными подвижными элементами. Приводные клещевые ГУ бывают с канатным приводом, с электро-механическим приводом, с гидравлическим прив. В них легко осуществляется постоянное обжатие груза независимо от его размера.
13. Эксцентриковые ГУ – для захвата и перемещения в вертикальных плоскостях грузов с твердой пов-тью. Бывают: с односторонним расположением эксцентриков, с двусторонним. Разделяются на самозатягивающиеся и с доп. поджатиями путем воздействия на эксцентрик гибкой тяги или рычажной системе. Наиболее применимы для перемещения листового металла.
Расчет. При подъеме груза эксцентрик затягивается и возникает усилие распора N, создающее силу трения, удерживающее груз.  , f – коэффициент трения груза.
, f – коэффициент трения груза.  ,
,  .
.
Сила сжатия  . Реакция в шарнире
. Реакция в шарнире  .
.
КПД  .
.  – коэффициент трения в шарнире. Угол α рекомендуют доводить до 10°. При уменьшении угла появляются трудности снятия груза.
– коэффициент трения в шарнире. Угол α рекомендуют доводить до 10°. При уменьшении угла появляются трудности снятия груза.
14. Клиновые ГУ для подъема и транспортирования грузов, имеющих полость, выполненную в виде круглого отверстия, необходимого диаметра для взаимодействия с распорными элементами. Распорные элементы в виде конических сегментов, клиновидных или призматических кулачков, размещающихся в отверстиях груза. Для понижения износа и большей подвижности распорные элементы могут быть с шаровой пов-тью.
15. Электромагнитными ГУ оборудуются в основном краны с электроприводом (мостовые, козловые), реже самоходные стреловые. Электромагнитные ГУ подвешиваются на крюковой подвеске или траверсе, если груз длинномерный. Электромагнитные ГУ требуются для перегрузки грузов любой формы при температуре выше 500. Для подъема длинномерных грузов применяют траверсы с прикрепленными к ним несколькими электромагнитами. При работе электромагнитных ГУ имеется опасность отрыва и падения груза по причине случайного выключения электроэнергии. В тех случаях, когда перемещение грузов должно производиться не на специально огороженной площадке с запрещённым доступом людей, электромагнитные ГУ для обеспечения безопасности оборудуют предохранительными устройствами с отдельным электроприводом. В некоторых случаях на ГПМ устанавливают аккумулятор, от которого в момент отключения источника основного электропитания подаётся электроэнергия к электромагниту. Притягивающая сила электромагнита определяется формулой Максвелла:  где Jn – число ампер-витков обмотки; А – площадь соприкосновения груза с полюсами электромагнита; RВ и RМ – магнитное сопротивление соответственно воздушных и металлических участков пути магнитного потока. Условие надежного удержания груза FЭМ> GГ.
где Jn – число ампер-витков обмотки; А – площадь соприкосновения груза с полюсами электромагнита; RВ и RМ – магнитное сопротивление соответственно воздушных и металлических участков пути магнитного потока. Условие надежного удержания груза FЭМ> GГ.
Расчет заглубленных якорей.
1) Устойчивость якоря: gG2+T≥kyN2; Т-сила трения анкера о стену котлована Т=Nfcosα; ky-коэф.устойчивости якоря =3; G2-масса грунта котлована  ; a и b-размеры котлована; H-глубина заложения; l-длина анкера;
; a и b-размеры котлована; H-глубина заложения; l-длина анкера;  =1.5т/м3-объемная масса груза; f-коэф.трения анкера по грунту(по дереву=0,5; по стали=0,45)
=1.5т/м3-объемная масса груза; f-коэф.трения анкера по грунту(по дереву=0,5; по стали=0,45)
2) Изгибающий момент: М= 
3) Момент сопротивления сечения анкера:  ; m=0.85-k-T; d=
; m=0.85-k-T; d=  -для бревна; n-кол-во бревен.
-для бревна; n-кол-во бревен.
4) Удельное давление на грунт от действия горизонтальных сил.
4.1) Для обеспеченных заглубленных якорей.
 4.2) Для углубленных якорей.
4.2) Для углубленных якорей. 
По способу поворота
· Неповоротные
· Свободноповоротные, вращющиеся совместно с грузозахватным органом под действием усилий строповщика инерционных или ветровых нагрузок
4) Принудительно поворотные, вращающиеся специальным приводным механизмом, встроенным в грузозахватное приспособление и управляемым машинистом.
1. Роль грузозахватных и такелажных устройств на подъемно-транспортных, погрузочно-разгрузочных и складских работах.
Погрузочно-разгрузочные операции производительных процессов занимают важное место. На подъемно-транспотрных и складских работах производительность труда определяется наличием высокоэффективных грузозахватных устройств.
Грузозахватное устройство предназначено для подвешивания, захватывания и удержания груза при подъеме и перемещении его грузоподъемными машинами в процессе выполнения подъемно-транспортных работ.
5) Статические и динамические нагрузки на ГУ. Коэффициент динамичности. Основные требования к конструкции ГУ с точки зрения безопасности их использования.
СТАТИЧЕСКИЕ
Когда грузозахватное устройство, удерживающее груз неподвижно или перемещается с постоянной скоростью по прямолинейному пути на него действует статическая нагрузка. Возможно различное взаимоположение грузозахватного устройства и груза.
1) Центр тяжести груза совпадает с вертикальной осью подвеса грузозахватного устройства
, где F – усилие, воспринимаемое грузозахватным устройством.
2) Центр тяжести не совпадает с осью подвеса грузозахватного устройства. Для этого случая характерно варианта:
а) Грузозахватное устройство может … в вертикальной плоскости относительно нижней точки подвеса
Усилие отрывающее груз от грузозахватного устройства будет определяться:
А усилие сдвигающее груз относительно ГУ
б) ГУ может откланяться вместе с ветвью подвеса
в – плечо общего ц.т.
Действует момент от веса груза
Усилие отрывающее груз
Усилие сдвигающее груз
Также необходимо учитывать момент от веса груза и ГУ
С учетом этого момента:
ДИНАМИЧЕСКИЕ
Возникают в период неустановившегося движения при подъеме груза, передвижении беговой тележки, а также при ее повороте. При нормальном условии эксплуатации вертикальная динамическая нагрузка на ГУ имеет существенное значение только при работе механизма подъема. При работе механизмов передвижения и повороте она не превышает 5% от статической. Таким образом вертикальная динамическая нагрузка возникая в процессе подъема является основной при этом возможны 2 варианта:
1) Подъем с виса
Предполагается, что груз уже приподнят и статическая нагрузка, действующая на ГУ равна весу груза. В начальный момент торможения опускающегося груза возникает динамическая нагрузка. Нагрузка на ГУ складывается из статической и динамической которая является функцией времени, ее развития и жесткости опорной конструкции.
– нагрузка на ГУ
– динамический коэффициент
Расчетные схемы двухмассовой и трехмассовой систем
В общем виде ГУ представляет собой трехмассовую систему с массами груза , крана , вращающихся частей привода и двумя упругими связями, жесткость конструкции крана и жесткость каната подвески .
Усилие в упругом звене определяется по формуле:
- избыточная сила двигателя
- кожффициент пропорциональности
- максимальное значение усилия
2) Подъем с подхватом
В данном варианте груз лежит на каком-либо основании, канаты провисают и следовательно в начальный момент работы механизм подъема нагрузки на ГУ отсутствует. Нагрузка на ГУ складывается из статической и динамической, которая является функцией скорости каната и жесткости опорной конструкции.
Жесткостью каната можно пренебречь, и рассматриваются, как одна масса. При подъеме груза после включения двигателя вначале выбирается слабина каната, затем происходит упругая деформация элементов конструкции ГПМ. Это продолжается до тех пор пока усилие на ГУ возрастая от 0 не станет равным весу груза. После этого начинается собственно подъем груза.
Динамическая составляющая, действующая на ГУ:
Максимальное значение динамической нагрузки при sint=-1:
- скорость подъема груза
– круговая частота свободных колебаний
Полная нагрузка, действующая на ГУ
– прогиб конструкции от статической нагрузки
Основные требования к конструкции ГУ с точки зрения безопасности их использования.
1. Грузозахватное приспособление должно соответствовать документации и своему назначению.
2. Должно находиться в исправном состоянии и обеспечивает безопасную работу
6) Строповые ГУ типы, устройство. Расчет стропов и звеньев строповых ГУ.
Основным элементом строповых гу является гибкие ветви и соединенные с ними захватные органы. По способу захвата груза: универсальные, обхватывающие груз гибкой ветвью каната; зацепляющие груз за имеющиеся на нем спец. захватные элементы; подхватывающие, строповые гзу могут подвешиваться на крюк крана непосредственно за гибкий элемент или при помощи соединительных звеньев.
Канатные стропы разделяются по количеству ветвей: одноветвивые(1СК); двухветвивые(2СК);трехветвивые(3СК);четырехветвивые(4СК);универсальные(УСК).
Цепные стропы: одноветвивые(1СЦ); двухветвивые(2СЦ); трехветвивые(3СЦ); четырехветвивые(4СЦ);универсальные(УСЦ); с двумя замкнутыми ветвями(СЦ2в3)
Ветви канатных стропов изготавливают из отрезков стропов каната мм. На концах канатов заделывают коуши или петли в зависимости от назначения стропа. Свободные концы заплетают (г),соединяют зажимами (д) или гильзоклиновыми (е). Многоветвивые стропы предназначены для подъема и транспортировки груза за 2.3,4 точки (в,д). Широкое применение они получили для строповки элементов зданий снабженных петлями или проушинами. При использовании 4хветвивого стропа должна передаваться на все ветви равномерно. Цепные стропы по сравнению с канатными более гибкие и пригодны для подъема грузов с острыми ребрами. Они хорошо накладываются на груз и снимаются. Недостатки цепных строп: имеют большую массу; не допускают резких динамических нагрузок; внезапно рвутся; дефекты цепей трудно обнаружить.
Расчет стропов
Расчет проводится с учетом числа ветвей и угла их наклона к вертикали.
Усилие возникающее в каждой ветви стропа
, при угле ; е=1;1,15;1,42
- угол наклона ветвей
n – число ветвей
Разрывное усилие:
- коэффициент запаса прочности
- для неперегибающихся канатов,
Соединительные звенья бывают следующих типов: Разъемные треугольные (Р), Разъемные овальные (), Треугольные (Т), Овоидные (О), Овальные (Ов), Крюки с замком (К1), Крюки без замка (К2), Крюки с утопленным носом (К3), Карабины (Кр)
Звенья типов 1)-6) служат для навешивания стропов на грузозахватный орган ГПМ и для соединения частей стропов. Типы 7)-8) для соединения ГУ со специальными приспособлениями на грузе.
Расчет нестандарстых звеньев:
Расчет сводится к подбору их сечений с обеспеченным запасом прочности на растяжение и изгиб.
Запас прочности на растяжение:
Запас прочности на изгиб:
- временное сопротивление разрыву
– напряжение растяжения
- предел текучести при изгибе
- напряжение изгиба
Напряжение растяжения в прямолинейных частях
F – усилие ветви стропа
- угол наклона стержня звена к оси перпендикулярной направлению усилия
А – площадь поперечного сечения стержня
Напряжение изгиба в крайних волокнах поперечного сечения звена:
1) Для внутреннего волокна
2) Для наружного волокна
– изгибающий момент
- ординаты внутреннего и наружного волокна поперечного сечения звена
r – радиус кривизны центральной оси
- момент инерции площади поперечного сечения звена
6. Цепные стропы подлежат браковке при увеличении звена более 3% от первоначального размера и при уменьшении d сечения звена вследствие износа на 10%. Браковка колец, петель и крюковых съемных гзу производится: при наличии трещин; при износе поверхностей элементов или местных вмятин, приводящих к уменьшению площади поперечного сечения на 10%; при наличии остаточных деформаций, приводящих к изменению первоначального размера элемента более чем на 5%.
Канатные стропы: обрыв 1 или более прядей каната; корзинообаазные деформации; выдавливание сердечника; выдавливание или расслоение прядей; местное увеличение или уменьшение диаметра каната; повреждения появившихся в результате температурных воздействий или электрического дугового разряда; признаках смещения канатов в защелках или втулках; число видимых обрывов наружных проволок превышает значения
7. Основное требование к конструкции вилочных гзу: обеспечить расположение центра тяжести груза на одной вертикали с точкой подвеса, что предотвращает самопроизвольное спадание груза с лап. По способу подведения лап различают: с неповоротными лапами, горизонтально поворотными, вертикально поворотными.
Поворотные лапы могут быть выполнены в виде коромысла(коромысловые гзу). Расположеение лап у неповоротных и горизонтально поворотных может быть несимметричным, у ветикально поворотных оно симметричное. По числу лап: 1-,2-,многолапчатые.
Однолапчатые вертикально поворотные и коромысловые выполняются без уравновешивания стабилизации устойчивости груза. Горизонтально поворотные имеют уравновешивающие устройства виде груза или пружины. Управление поворотом лап или вил может быть ручным, дистанционным, автоматическим и полуавтоматическим. Вилочные гор.пов.: приспособление состоит из из 2 вил-1 жестко закрепленных на соединенных между собой балках-2, к плечу-3 шарнирно прикреплен канат-4, тяга-9. Канат-4 соединен серьгой-7 с канатом-8. На серьге-7 шарнирно закреплен балансир-5 с противовесом-6. В порожном






