АВТОМАТИЧЕСКОЙ (АФ) И МЕХАНИЗИРОВАННОЙ СВАРКЕ(МП)
1. АФ на флюсовой подушке без разделки кромок.
| δ, мм
| 3
| 5
| 8
| 10
| 12
| 14
| 16
| 20
|
| υсв, м/ч
| 48-50
| 48-50
| 48-50
| 32-34
| 30-32
| 25-30
| 27-29
| 22-24
|
2. АФ на флюсовой подушке V- образной разделкой кромок
| δ, мм
| 14
| 16
| 20
| 24
|
| υсв, м/ч
| 36
| 32
| 27
| 19
|
3. АФ угловых швов в «лодочку».
| δ, мм
| 6
| 8
| 10
| 12
|
| υсв, м/ч
| 45-47
| 28-30
| 20-22
| 18-20
|
4. АФ угловых швов наклонным электродом.
| δ, мм
| 3
| 4
| 5
| 7
|
| υсв, м/ч
| 60
| 53-55
| 54-58
| 44-46
|
Окончание приложения 8
МП стыковых швов без разделки кромок.
| δ, мм
| 0,6-1,0
| 1,2-2,0
| 3-5
| 6-8*
| 8-12*
|
| υсв, м/ч
| 20-25
| 18-24
| 20-22
| 18-22
| 16-20
|
Примечание: * - с разделкой кромок.
5. МП угловых швов.
| δ, мм
| 1,0-1,3
| 1,5-2,0
| 1,5-3,0
| 3-4
| 5-6
| 7-9
| 10-15
|
| υсв, м/ч
| 18-20
| 16-18
| 14-16
| 20-22
| 29-31
| 30-32
| 30-32
|
Задача 1.
Расчет одностоечных поворотных устройств.
Задание:
1 Изучить конструкцию изделия и ТУ на ее изготовление из соответствующего ГОСТа выбрать типы соединения. На чертеже изделия указать условное обозначение сварных швов. ГОСТ 16037-80, ГОСТ 2.312-72. (Конструкция изделия в приложении 1)
2 Выбрать соответствующие виды сварки, отдавая предпочтение механизированной и автоматической сварки.
3 Указать конструктивные элементы и размеры сварных соединений до сварки, и размеры швов после сварки.
4 Разработать технологический процесс сборки, сварки узла и выявить наибольшее удобное положение для осуществления прихватки и сварки.
5 Определить вес изделия с входящими элементами и положением центра тяжести.
6 Рассчитать крутящий и опрокидывающий момент и в зависимости от величины и исходных данных подобрать поворотное устройство.
7 Выполнить расчет поворотного устройства.
Решение:
Расчёт манипулятора
При сварке трубы с фланцем с обратной стороны для удобства работы сварщика можно использовать сварочный манипулятор. Он будет поворачивать изделие в процессе сварки. Произведем подбор сварочного манипулятора.
Схема расчёта вертикального сварочного манипулятора представлена на рисунке 1.

Рисунок 1 – Схема расчета манипулятора
Мощность привода и прочность элементов поворотного устройства рассчитывается под действием на него усилия и момента и выбранной скорости вращения.
Дано: D2=… мм; δф=… мм; d1=… mm; d6=… mm;
Х1=… мм; Х2=…мм; Х3=…мм; Х4=… мм; Х5=… мм; Х6=… мм.
У1=… мм; У2=… мм; У3=… мм; У4=… мм; У5=… мм; У6=…мм.
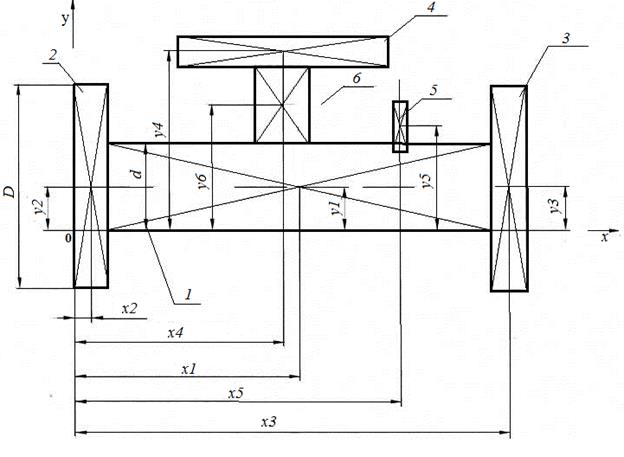
Рисунок 2 – Схема расчета центра тяжести
1. Находим центр тяжести (рисунок 2)
 ,мм (1)
,мм (1)
 ,мм (2)
,мм (2)
где F – площадь;
Хc, - расстояние от начало координат до центра детали (по х);
УС, - расстояние от начало координат до центра детали (по у);
F1=… мм; F2=… мм; F3=… мм; F4=… мм; F5=… мм; F6=… мм.
Sx=F1 х1 + F2 x2 + F3 x3 + F4 x4 + F5 x5 + F6 x6
Sx =…мм 3
Sy=F1y1 + F2y2 + F3y3 + F4y4 + F5y5 + F6y6
Sy=… мм 3
 =…мм2
=…мм2
 мм
мм
 …мм
…мм

Рисунок 3 – Расположение центра тяжести трубопровода
2 Определим вес изделия G
G=ρ·V
ρ – плотность стали
V– объем детали
V=V1+V2+V3+V4+V5+V6
 см3
см3
 см3
см3
V2=V3=V4
 см3
см3
 см3
см3
V=… см3
G=… г =… кг =… Н
2 Определим опорные реакции.
 Н - опорная реакция, расположенная в вертикальной
Н - опорная реакция, расположенная в вертикальной
плоскости перпендикулярно к оси шпинделя.
h=Xc+30=… мм
 …Н - опорная реакция в горизонтальной плоскости
…Н - опорная реакция в горизонтальной плоскости
R – наибольший радиус изделия (фланца);
е=… мм отклонение центра вращения от центра тяжести
 Н - результирующая опорная реакция
Н - результирующая опорная реакция
 Н - опорная реакция, расположенная в вертикальной плоскости перпендикулярно к оси шпинделя.
Н - опорная реакция, расположенная в вертикальной плоскости перпендикулярно к оси шпинделя.
 Н - опорная реакция в горизонтальной плоскости
Н - опорная реакция в горизонтальной плоскости
 Н - результирующая опорная реакция
Н - результирующая опорная реакция
4 Определяем моменты
 Нмм - изгибающий момент, действующий в вертикальной плоскости
Нмм - изгибающий момент, действующий в вертикальной плоскости
 Нмм - изгибающий момент, действующий в плоскости, ей перпендикулярной.
Нмм - изгибающий момент, действующий в плоскости, ей перпендикулярной.
 - крутящий момент
- крутящий момент
 Нмм - результирующий эквивалентный момент
Нмм - результирующий эквивалентный момент
5 Определим опорные реакции.
Н - опорная реакция, расположенная в вертикальной плоскости перпендикулярно к оси шпинделя.
h=Xc+30=… мм
 Н - опорная реакция в горизонтальной плоскости
Н - опорная реакция в горизонтальной плоскости
R – наибольший радиус изделия (фланца);
Н - результирующая опорная реакция
 Н - опорная реакция, расположенная в вертикальной плоскости перпендикулярно к оси шпинделя.
Н - опорная реакция, расположенная в вертикальной плоскости перпендикулярно к оси шпинделя.
Н - опорная реакция в горизонтальной плоскости
 Н - результирующая опорная реакция
Н - результирующая опорная реакция
6 Определяем моменты
Нмм - изгибающий момент, действующий в вертикальной плоскости
 Нмм - изгибающий момент, действующий в плоскости, ей перпендикулярной.
Нмм - изгибающий момент, действующий в плоскости, ей перпендикулярной.
 Нм - крутящий момент
Нм - крутящий момент
 Нмм - результирующий эквивалентный момент
Нмм - результирующий эквивалентный момент
5 Определим диаметр вала под подшипник:
 мм
мм
6 Определим мощность двигателя

n= 2 об/мин;
η0=0,7
 кВт
кВт
Расчет механизма наклона
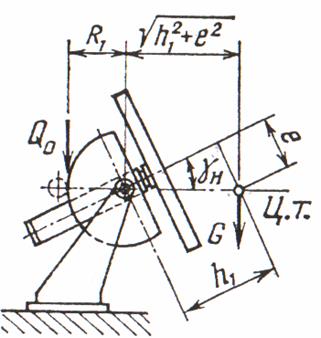
Рисунок 4 – Схема манипулятора для расчета механизма наклона
1 Определим наибольший грузовой момент
 Н·м – наибольший грузовой (опрокидывающий) момент относительно оси наклона, так как при этом плечо грузового момента достигает максимума, равно
Н·м – наибольший грузовой (опрокидывающий) момент относительно оси наклона, так как при этом плечо грузового момента достигает максимума, равно 
h1=… мм
G - масса трубопровода, G=… Н
2 Определим опорные реакции на цапфах поворотной траверсы
С1=С2=  Н
Н
С0=С1+С2 – сумма опорных реакций
С0=.. Н
3 Определяем суммарное окружное усилие на зубчатых секторах
 Н
Н
Согласно приведенным расчетам выбираем сварочный вращатель.
Задача 2
Исходные данные (см приложение 1)
Диаметр обечайки D, мм.
Длина обечайки L, мм.
Толщина стенки δ, мм.
1 Задание
1 Определить активную внешнюю нагрузку на роликовые опоры стенда действующие в статическом положении.
2 Определить величину окружного усилия на приводных роликоопорах во время вращения изделия.
3 Рассчитать усилие на приводной и холостой роликоопоре.
4 Сравнить полученные данные по п.3 с допустимой нагрузкой на роликовые опоры указанные в соответствии с ГОСТ 21327-78 в зависимости от dр роликовой опоры.
Решение
Активная внешняя нагрузка стенда состоит из центральной силы G, равной весу вращаемого изделия, и грузового момента  , где G – вес обечайки, е – смещение центра тяжести обечайки - дисбаланс. При сварке обечаек дисбаланс принимается равным величине удвоенного предельного отклонения по диаметру обечайки (см. табл.1).
, где G – вес обечайки, е – смещение центра тяжести обечайки - дисбаланс. При сварке обечаек дисбаланс принимается равным величине удвоенного предельного отклонения по диаметру обечайки (см. табл.1).
Таблица 1 Предельные отклонения по диаметру обечайки
| Наружный диаметр D, мм
| Предельные отклонения по диаметру e, мм
|
| <1000
| ± 5
|
| >1000-1500
| ± 7
|
| >1500-2300
| ± 9
|
| >2300-2800
| ± 11
|
| >2800-3000
| ± 12
|
| >3000
| ± 12
|
Вес обечайки найдём по формуле  Н, где
Н, где  – объём листа обечайки, мм3;
– объём листа обечайки, мм3;
γ – плотность стали, г/мм3. γ = 7,86 10-3 г/мм3.


В статическом состоянии стенда при е = 0 сила G создаёт на роликоопорах опорные реакции Q, зависящие от угла α. Допускаемый диапазон центрального угла равен: α =500-1200. (1,стр.232).
 (1.стр.227) (1)
(1.стр.227) (1)
Эту же величину можно выразить в зависимости от диаметра изделия D, поперечного расстояния между роликоопорами  и диаметра роликов
и диаметра роликов  :
:
 (1.стр.227) (2)
(1.стр.227) (2)
Принимаем = 60÷800 мм (см.табл.2). Поперечное расстояние между роликами определим по формуле 
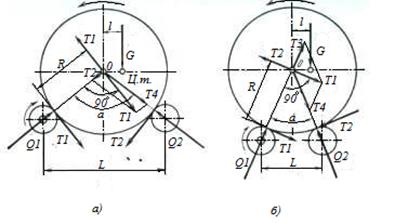
Рисунок 1 Расчётная схема роликового стенда: а - при α > 90°; б – при α < 90°.
Во время вращения изделия на приводных роликах возникает окружное усилие Т1 (см. рисунок1). Чтобы оценить влияние этого усилия на опорные реакции роликов Q, приложим к центру вращаемого барабана О две равные и прямо противоположные силы Т1. Одна из них, в паре с окружным усилием на роликах, образует момент Т1R, вращающий барабан вокруг оси О. Другую силу раскладываем по направлениям опорных реакций на две составляющие Т3 и Т4. Следовательно, под действием окружного усилия Т1 к основным опорным реакциям роликов Q (см. формулу (1)) добавляются силы: ±Т3 - на ведущие роликоопоры и Т4 - на ведомые, холостые роликоопоры. Аналогичное действие производит сила Т2, добавляя к опорным реакциям силы  и
и  . Таким образом, суммарные опорные реакции на приводных и холостых роликоопорах будут соответственно:
. Таким образом, суммарные опорные реакции на приводных и холостых роликоопорах будут соответственно:
Q1 = Q + Т3 + Q2 = Q + Т4 + (1.стр.228) (3)
По рисунку 1, а имеем:


Подставив в формулы (3) найденные значения Q, Т3 и Т4, получим следующие выражения для опорных реакций:
 ;
;  (1.стр.228) (4)
(1.стр.228) (4)
Величина окружного усилия Т1 на приводных роликах определится из условия преодоления (уравновешивания), во-первых, грузового момента , а во-вторых, сопротивления вращению холостых роликоопор Т2.
Условие равновесия момента относительно оси вращаемого барабана запишется как
 , откуда
, откуда
 (1.стр.228) (5)
(1.стр.228) (5)
где R – радиус вращаемого барабана; Т2 – сопротивление вращению холостых роликов.
Сопротивление вращению приводных роликов и приводного вала должно быть учтено в дальнейших расчётах, при определении крутящего момента и мощности на приводном валу роликоопор.
Сопротивление вращению холостых роликоопор, приведённое к их окружности, определяется как
 (1.стр.228) (6)
(1.стр.228) (6)
где dp – диаметр оси роликов в подшипниках; f – коэффициент трения в подшипниках роликоопор (для подшипников скольжения f = 0,1, для подшипников качения при конических роликоподшипниках f = 0,02); μ – коэффициент трения качения (для стальных роликов μ = 0,06-0,08, для обрезиненных μ = 0,25-0,35), принимаем μ = 0,3. Рекомендуемое значение  = 50-100 мм. Выбираем =…мм.
= 50-100 мм. Выбираем =…мм.
Подставив значение Т2 из формулы (6) в выражение (5) получим:
 (1.стр.229) (7)
(1.стр.229) (7)
Заменив в этой формуле величину Q2 его значением из формулы (4), после некоторых преобразований получим окончательное выражение для величины необходимого окружного усилия Т1 на приводных роликоопорах:
 (1,стр. 229) (8)
(1,стр. 229) (8)
Аналогично для холостых роликоопор:
 (1,стр. 229) (8)
(1,стр. 229) (8)
где  = е/R - эксцентриситет, выраженный в долях радиуса барабана (дисбаланс);
= е/R - эксцентриситет, выраженный в долях радиуса барабана (дисбаланс);  - коэффициент учитывающий трение.
- коэффициент учитывающий трение.
Окружные силы Т1 и Т2, возникающие на стендовых роликах при вращение барабана, увеличивают опорные реакции роликов, если барабан вращается против часовой стрелки по рис. 1, так как при этом силы Т1 и Т2 направлены вниз. Вызванная этими силами добавочная нагрузка на ролики тем больше, чем больше угол α и чем выше коэффициенты трения f и μ.
Если же барабан вращается в обратную сторону, то силы Т1 и Т2 направлены вверх и опорные реакции уменьшаются. Поэтому для определения максимальных расчётных усилий надо выбрать направление вращения приводного вала и положение центра тяжести G так, как показано на рис.1, т.е. с окружными усилиями Т1 и Т2, направленными вниз.
Подставив найденное выше значение Т1 в формулы (4), получим окончательное выражение для опорных реакций роликоопор при их вращении под нагрузкой:
 (1,стр. 230) (9)
(1,стр. 230) (9)
 (1,стр. 230) (9)
(1,стр. 230) (9)
Зная величину окружных и радиальных усилий, действующих на роликоопоры, нетрудно определить расчётную нагрузку роликов, их осей и валов:
Определяем расчётную нагрузку действующую на каждую роликовую опору:
где  - нагрузка на одну ведущую роликоопору;
- нагрузка на одну ведущую роликоопору;  - то же, на холостую;
- то же, на холостую;  - число роликоопор в одном ряду, = 6;
- число роликоопор в одном ряду, = 6;  - коэффициент, учитывающий неравномерность
- коэффициент, учитывающий неравномерность
распределения нагрузки на роликоопорах (для обрезиненных роликов при i ≥3 = 1,2÷1,3). Значение допускаемой нагрузки на роликовые опоры в соответствии с ГОСТ 21327-78 в зависимости от d роликовой опоры представлены в таблице 2.
Таблица 2 Значение допускаемой нагрузки на роликовые опоры в соответствии
с ГОСТ 21327-78 в зависимости от d роликовой опоры
| Допускаемая нагрузка
Rдоп, кН
| 2,5
| 5,0
| 20, 0
| 25, 0
| 50,0
| 100,0
| 200,0
| 400,0
| 800,0
|
| Диаметр роликоопор
dp, мм.
| 60
| 100;
160
| 100;
160
| 160;
250
| 250;
320
| 250;
320;
400;
500
| 400;
500;
630
| 500;
630;
800
| 630;
800
|
По наибольшей из величин и подбираются нормализованные роликоопоры и грузошины к ним в соответствии с действующим сортаментом и каталогами.
Проверка запаса сцепления приводных роликов с изделием:
 (1,стр. 234) (10)
(1,стр. 234) (10)
где  - коэффициент сцепления роликов с изделием. Для стальных роликов можно принимать =0,15, для обрезиненных роликов можно принять =0,3÷0,4.
- коэффициент сцепления роликов с изделием. Для стальных роликов можно принимать =0,15, для обрезиненных роликов можно принять =0,3÷0,4.
Необходимая мощность на приводном валу роликоопор, кВт, определяется по формуле:  (1,стр. 234) (11)
(1,стр. 234) (11)
где  - частота вращения вала при маршевой скорости, об/мин. Принять равным 10 об/мин.
- частота вращения вала при маршевой скорости, об/мин. Принять равным 10 об/мин.
Из каталога по рассчитанным данным выбираем роликовый стенд модели ……..
Данный роликовый стенд предназначен для вращения цилиндрических изделий со сварочной скоростью при ручной, полуавтоматической и автоматической сварке внутренних и наружных кольцевых швов, а также для установки изделий в положение, удобное для сварки. На нем производить сварку продольных швов обечаек, приварку деталей насыщения, а также другие работы, требующие поворота изделия.
Сварка может производиться под слоем флюса и в защитной среде инертных газов.
Роликовый стенд состоит из четырех секций, привода, смонтированного на одной из секций, и шкафа управления. В каждую секцию входят рама, приводная и холостая роликоопоры. Приводные роликоопоры соединены между собой посредством жестких муфт и промежуточных валов.
Роликоопора состоит из чугунного основания, литого стального колеса, обрезиненного массивными шинами, и вала, вращающегося в подшипниках. Холостые роликоопоры перекидные, т.е. имеют два положения в зависимости от диаметра свариваемого изделия.
Привод стенда обеспечивает плавное бесступенчатое регулирование числа оборотов свариваемого изделия и вращения его с заданной скоростью.
Управление стендом дистанционное.
Техническая характеристика.
Наибольший крутящий момент на выходном валу привода, Нм…………
Грузоподъемность, кг…………………………………………………..........
Частота вращения ролика, об/мин…………………………………..............
Маршевая частота вращения ролика, об/мин………………………………
Рекомендуемые диаметры свариваемых круговых швов, мм……………..
Расстояние от основания до оси вращения роликов, мм…………………..
Наружный диаметр роликов, мм...…………………………………………..
Размер массивной бандажной шины по ГОСТ 5883-76, мм…………….
Ток питающей сети:
Род……………………………………………………………………………..
Частота,Гц…………………………………………………………………….
Напряжение, В……………………………………………………………..
Ток электропривода:
Род…………………………………………………………………………...
Напряжение,В……………………………………………………………....
Напряжение тока цепей управления, В……………………………………..
Электродвигатель:
Тип…………………………………………………………………………...
Мощность, кВт………………………………………………………….......
Частота вращения, об/мин………………………………………………….
Тип тиристорного преобразователя……………………………………….
Габариты,мм:
Длина.……………………………………………………………………….
Ширина………………………………………………………………………
Высота………………………………………………………………………..
Масса (без электрошкафа), кг……………………………………………....
Масса электрошкафа, кг…………………………………………………….
Задача 3.






