Для универсальных решетных сепараторов, на которых разделение выполняется на решетах с круглыми и с прямоугольными отверстиями обычно выбирается режим работы, характеризуемый соотношением коэффициентов
 , [ 1 ]
, [ 1 ]
где КН - граничное условие сдвигов материала вниз по плоскости решета;
КВ - граничное условие сдвигов материала вверх по плоскости решета;
К - показатель кинематического режима работы грохота;
К0 - граничное условие отрыва частицы от поверхности решета.
 ,[ 1 ] (5.1)
,[ 1 ] (5.1)
 , [ 1 ] (5.2)
, [ 1 ] (5.2)
 , [ 1 ] (5.3)
, [ 1 ] (5.3)
где φ - угол трения материала по решету;
α - угол наклона решёт;
ε - угол, характеризующий направленность колебаний.
Принимаем φ = 30 º; α = 7 º; ε = 0 º.
 ,
,
 ,
,
 .
.
Показатель кинематического режима работы определяется по формуле
 , (5.4)
, (5.4)
где n - частота вращения кривошипа, n = 6,7 - 8,2 с -1;
r - радиус кривошипа, r = 7,5мм.
Принимаем n = 7,5 с -1.

 , т.е.движение материала происходит вверх и вниз без отрыва от решёт.
, т.е.движение материала происходит вверх и вниз без отрыва от решёт.
При работе грохота возникает сила сопротивления перемещению решётного стана, которая определяется по формуле
 , [ 1 ] (5.5)
, [ 1 ] (5.5)
где λ - коэффициент, учитывающий усилие на перемещение зернового материала и сопротивление щёток механизма очистки решёт, λ ≈ 1,5;
mPC - масса решётного стана, кг;
Jx - ускорение решётного стана.
Масса решётного стана определяется по выражению
 , [ 1 ] (5.6)
, [ 1 ] (5.6)
где Σ m р - суммарная масса решёт в решётном стане.
Масса одного решета определяется
 , [ 1 ] (5.7)
, [ 1 ] (5.7)
где BP, LP, δ - соответственно ширина, длина, толщина решета;
рм - плотность материала, из которого изготовлено решето;
μ - коэффициент живого сечения решета.




 .
.
Для проведения прочностных расчётов учитывается максимальное значение силы Px, которое достигается при cos ω t = 1.

Мощность, затрачиваемая на привод решетного стана определяется по формуле
 . [ 1 ] (5.8)
. [ 1 ] (5.8)
 .
.
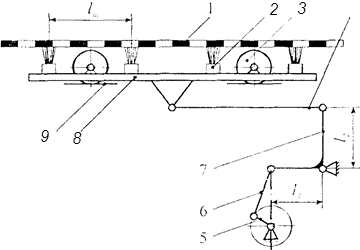
Для очистки решёт в рамных очистителях щетки 2 устанавливаются под решетом 1 на подвижных рамках 8 (рисунок 4). На рамках с помощью эксцентриковых валов закреплены ролики 3, опирающиеся на направляющие дорожки 9. Поворачивая эксцентриковые валы, регулируют положение щеток по отношению к решету по мере износа щетины. Нормальным считается положение, при котором щетина поднимается выше уровня решета примерно на 1мм. При вращении кривошипа 5 рамка приводится в возвратно-поступательное движение посредством шатуна 6, коромысла 7 и тяги4.
Рисунок 4 - Схема рамного очистителя решёт
Расстояние между щётками определится по выражению
 , [ 1 ] (5.9)
, [ 1 ] (5.9)
где LP - длина одного решета;
Δ - размер не проштампованных полей решётного полотна, Δ = 25мм;
Z Щ - число щёток под одним решетом.
В существующих машинах l Щ = 170 - 240мм. [ 1 ]
Определяем необходимое число щёток на одно решето
 .
.
Принимаем число щёток Z Щ = 4, тогда

Для полного ометания поверхности решета ход щётки должен быть равен
 [ 1 ], (5.10)
[ 1 ], (5.10)
где δ - величина перекрытия ходов щёток, δ = 5мм. [ 1 ]
 .
.
Исходя из геометрических параметров механизма привода щёток, величина перемещения определяется
 . [ 1 ] (5.11)
. [ 1 ] (5.11)
где r щ - радиус кривошипа механизма привода щёток;
l 1, l 2 - плечи коромысла.
При l 1 = l 2 = 240мм радиус кривошипа будет равен

Рекомендуемая средняя скорость щёток в рамных очистителях V Щ = 0,20 - 0,52 м/с. [ 1 ]
Принимаем V Щ = 0,32 м/с.
Определяем требуемую частоту вращения кривошипа механизма привода щёток
 . (5.12)
. (5.12)
Мощность, затрачиваемая на привод щёток, определяется из выражения
 [ 1 ], (5.13)
[ 1 ], (5.13)
 .
.
Полная мощность необходимая на привод равна
 .
.
По требуемой мощности на привод выбираем электродвигатель
4А90 LB 8УЗ: P = 1,1 кВт, n = 750 мин -1.
Прочностные расчёты
Расчёт вала привода щёток
В предварительном расчёте вала определяем минимальный диаметр
 ,[ 3 ] (6.1)
,[ 3 ] (6.1)
где P - мощность, передаваемая через вал, равна половине требуемой на привод щёток, кВт;
n - частота вращения вала привода щёток, мин -1.
 .
.
Принимаем диаметр вала под подшипник d = 20мм, а диаметр вала в месте крепления кривошипа d = 25мм.
Составляем расчётную схему для проверочного расчёта вала.
 Рисунок 5 - Расчётная схема
Рисунок 5 - Расчётная схема
М, Нм
Составляем уравнение сил в вертикальной плоскости 
Составляем уравнение моментов относительно точки А.

Составляем уравнение моментов относительно точки В.
Вычисляем реакции в опорах по формулам


Горизонтальная плоскость
 М, Нм
М, Нм
Рисунок 6 - Расчётная схема для горизонтальной плоскости
Состасляем уравнение сил в горизонтальной плоскости

Составляем уравнение моментов относительно точки А.

вычисляем реакции в опорах


Наибольший полный изгибающий момент в месте крепления коромысла
 [ 3 ]
[ 3 ]
где М X – момент в горизонтальной плоскости; Нм
М Y - момент в вертикальной плоскости; Нм

Определяем напряжения изгиба по формуле
 [ 3 ], (6.2)
[ 3 ], (6.2)
где Миз – изгибающий момент;
d – диаметр вала;
W – момент сопротивления.

Определяем напряжения кручения по формуле
 [ 3 ] (6.3)
[ 3 ] (6.3)
где Т – крутящий момент на валу, Нм;
Wp – осевой момент сопротивления;
d – диаметр вала.

Определение эквивалентного напряжения
 [ 3 ] (6.4
[ 3 ] (6.4
 )
)
 [ 3 ] (6.5)
[ 3 ] (6.5)
Сталь 40Х  [ 3 ]
[ 3 ]

 определяется по графику [3] в зависимости от диаметра вала;
определяется по графику [3] в зависимости от диаметра вала;
S = 1,5 – 2,5 - коэффициент запаса прочности;
x ’ - коэффициент, учитывающий предел прочности материала
 [ 3 ]
[ 3 ]
x ’’ - коэффициент, учитывающий давление в посадке


 - условие прочности выполняется.
- условие прочности выполняется.