Регламент соревнований СУМО для ЛЕГО-роботов
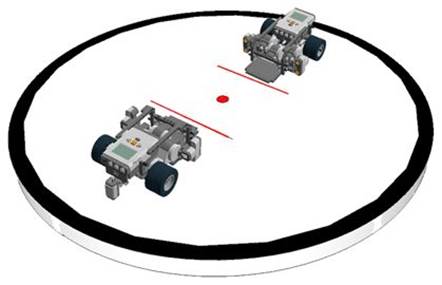
В этом состязании участникам необходимо подготовить автономного робота, способного наиболее эффективно выталкивать робота-противника за пределы черной линии ринга.
Условия состязания
1.1. Состязание проходит между двумя роботами. Цель состязания - вытолкнуть робота-противника за черную линию ринга.
1.2. После начала состязания роботы могут маневрировать по рингу как угодно.
1.3. Если любая часть робота касается поверхности вне подиума (за пределами черной линии), роботу засчитывается проигрыш в раунде.
1.4. Если по окончании раунда ни один робот не будет вытолкнут за пределы круга, то выигравшим раунд считается робот, находящийся ближе всего к центру круга.
1.5. Если победитель не может быть определен способами, описанными выше, решение о победе или переигровке принимает судья состязания.
1.6. Во время раунда участники команд не должны касаться роботов.
 2. Поле
2. Поле
2.1. Белый круг диаметром 1 м с чёрной каёмкой толщиной в 5 см.
2.2. В круге красными или белыми полосками отмечены стартовые зоны роботов.
2.3. Красной или белой точкой отмечен центр круга.
2.4. В соревнованиях используется поле в виде подиума высотой 10-20 мм. Поле располагается на ровной горизонтальной поверхности. Размер поверхности (основания) должен быть достаточным для исключения случайного падения роботов с высоты. Допускается расположить поле непосредственно на полу.
2.5 Поле изготавливается из твёрдого шероховатого материала, обеспечивающего достаточное качество сцепления резиновых покрышек колёс и гусениц с поверхностью (из ламинированной ДСП, листового пластика и т.п.). Линии могут быть выполнены как из самоклеящегося листового материала (плёнки), так и с помощью краски, устойчивой к истиранию.
Робот
3.1. Роботы должны быть собраны из деталей, выпущенных под маркой LEGO. Основой робота может служить набор LEGO MINDSTORMS NXT (8527, 8547 или 9797) и другие. Допускается использование датчиков сторонних производителей и соединительных кабелей, для которых явно указана прямая совместимость с конструкторами LEGO MINDSTORMS и лругие. Не допускаются разветвители, мультиплексоры, а также модифицированные, повреждённые или самодельные детали, нитки и шнуры, независимо от их происхождения, липкая лента, болты, и прочие предметы, не являющиеся оригинальными деталями ЛЕГО.
3.2. Во время всего раунда:
• Размер робота не должен превышать 250х250х250 мм.
• Вес робота не должен превышать 1 кг.
• Расстояние от всех частей робота до поверхности поля, должно быть больше или равно 8мм. Исключением являются только подвижные части, с помощью которых робот передвигается по полю, либо обеспечивает свою устойчивость к опрокидыванию (колёса, гусеницы или иные активные приспособления). Части робота, расположенные рядом с колёсами, с помощью которых робот передвигается по полю, на одной с ними оси и вращающиеся вместе с колёсами (например, шестерни), так же считаются частью колёс.
• Допускается использовать дополнительные подвижные конструкции, которые в процессе своего перемещения не выходят за первоначальные габариты корпуса робота, и не причиняют намеренных механических повреждений роботу соперника.
3.3. Робот должен быть автономным. Запрещена подача команд роботу по каналу Bluetooth, с помощью ИК-лучей, а также любого другого средства дистанционной связи.
3.4. Робот, по мнению судей, намеренно повреждающий других роботов, или как либо повреждающий или загрязняющий покрытие поля, будет дисквалифицирован на всё время состязаний.
3.5. Перед матчем роботы проверяются на габариты, вес, тип использованных деталей, и расстояние деталей до поля. Расстояние до поля измеряется путём просовывания стандартной одинарной планки ЛЕГО ТЕХНИК (например TechnicLiftarm 1 x 15 Thick) между поверхностью поля (стола) и корпусом робота. Планка должна проходить свободно, робот при этом не должен менять своего положения.
3.6. Конструктивные запреты:
• Запрещено использование каких-либо клейких приспособлений на колесах и корпусе робота.
• Запрещено использование каких-либо приспособлений, дающих роботу повышенную устойчивость, например, создающих вакуумную среду.
• Запрещено создание помех для ИК и других датчиков робота-соперника, а также помех для электронного оборудования.
• Запрещено использовать приспособления, бросающие что-либо в робота-соперника или запутывающие его.
• Запрещено использовать жидкие, порошковые и газовые вещества в качестве оружия против робота-соперника.
• Запрещено использовать легковоспламеняющиеся вещества.
• Запрещено использовать конструкции, которые могут причинить физический ущерб рингу или роботу-сопернику.
• Запрещено использовать подвижные конструкции, вызывающие намеренное зацепление между роботами или намеренное создание помех вращению колёс или гусениц робота соперника.
• Батарейки или аккумуляторы должны быть подключены к интеллектуальному блоку NXT штатным образом, дополнительные батарейные или аккумуляторные блоки не допускаются.
Роботы, нарушающие вышеперечисленные запреты, снимаются с соревнований.
3.8. Участники имеют право на оперативное конструктивное изменение робота между раундами (в т.ч. - ремонт, замена элементов питания, выбор программы и проч.), если внесенные изменения не противоречат требованиям, предъявляемых к конструкции робота и не нарушают регламентов соревнований. Время на оперативное конструктивное изменение робота контролируется судьёй, но не может превышать 3 минуты.
3.9. Между матчами разрешено изменять конструкцию и программы роботов.
3.10. Каждая команда может выставить на соревнования только одного робота.
Проведение соревнований
4.1. Соревнования состоят из серии матчей. Матч определяет из двух участвующих в нём роботов наиболее сильного. Матч состоит из 3 или 5 раундов по 60 секунд. Раунды проводятся подряд.
4.2. Соревнования состоят не менее чем из двух попыток (точное число определяется оргкомитетом). Попытка - это совокупность всех матчей, в которых участвует каждый робот минимум 1 раз.
4.3. Перед первой попыткой и между попытками команды могут настраивать своего робота.
4.4. До начала попытки команды должны поместить своих роботов в область «карантина». После подтверждения судьи, что роботы соответствуют всем требованиям, соревнования могут быть начаты.
4.5. Если при осмотре будет найдено нарушение в конструкции робота, то судья дает 3 минуты на устранение нарушения. Однако, если нарушение не будет устранено в течение этого времени, команда не сможет участвовать в состязании.
4.6. После помещения робота в «карантин» нельзя модифицировать (например: загрузить программу, поменять батарейки, изменить конструкцию) роботов до конца попытки.
4.7. Непосредственно в поединке участвуют судьи и операторы роботов – по одному из каждой команды.
4.8. Запуск роботов производится одновременным нажатием кнопки «Пуск» на интеллектуальных блоках обоих роботов по команде «Старт!», предварённой обратным отсчётом от 5 до 1. Отсчёт производит судья, запуск выполняется операторами роботов. Допускается предварительный запуск программы, если интеллектуальный блок расположен неудобно, и в программе робота предусмотрена задержка до нажатия на датчик касания. В этом случае по команде «Старт!» оператор должен нажать на датчик касания, запускающий дальнейшее исполнение программы. После запуска роботов операторы должны отойти от поля более чем на 1 метр в течении 5 секунд. В начале программы робота (в случае запуска по датчику касания – после точки возобновления работы программы) должна быть предусмотрена задержка длительностью 2 секунды и подача звукового сигнала любой тональности длительностью 0.2 секунды. Робот может начать активные действия только после подачи звукового сигнала. Если робот начинает двигаться ранее подачи звукового сигнала, или время задержки составляет менее 2 секунд, по решению судьи робот может быть признан проигравшим попытку.
4.9. Каждый оператор один раз во время всего матча может остановить старт раунда без штрафных санкций, но не позднее, чем за 1 секунду до окончания обратного 5-секундного отсчета. Задержка старта разрешена не более чем на 30 секунд. Задержка на большее время может быть осуществлена лишь по специальному разрешению судьи. После устранения неполадки роботы вновь устанавливаются на старт.
4.10. Если во время матча конструкция какого либо робота была ненамеренно повреждёна, то матч может прерваться и команде разрешается исправить конструкцию робота, в это время могут проходить матчи с другими командами, после починки робота и завершения текущего матча, прерванный матч продолжается.
4.11. Матч выигрывает робот, выигравший наибольшее количество раундов. Судья может использовать дополнительный раунд для разъяснения спорных ситуаций.
4.12. Операторы роботов должны быть готовы остановить роботов по команде судьи, если очевидно, что время раунда истекает, и ни один из роботов не покинет пределы ринга. Судья заранее (за 5-10 секунд) предупреждает операторов об истечении времени раунда.
4.12. Раунд проигрывается роботом если:
• Одна из частей робота коснулась зоны за чёрной границей ринга.
• Робот находится дальше от центра ринга, чем робот противника. В случае если время раунда истекло, и ни один из роботов не вышел за границы ринга.
• Робот был опрокинут, или получил конструктивные повреждения, не позволяющие ему продолжать активные действия.
Варианты проведения соревнований (сокращено)
5.1. Правила предусматривают три уровня сложности. Организатор соревнований обязан заранее предупредить участников о выбранном уровне сложности. Локальным оргкомитетом принято решение выбрать для соревнований третий уровень сложности.
5.4. Уровень №3: Повышенная манёвренность. Требует хороших умений. Вынуждает робота ориентироваться в пространстве.
5.4.1. Робот в своей конструкции обязан иметь хорошо видимую стартовую кнопку, которая выполняет функцию включения робота. Допускается использовать запуск программы по нажатию на датчик касания.
5.4.2. После объявления судьи о начале раунда, роботы подготавливаются операторами, после подготовки оператор должен сообщить судье о том, что робот готов, после этого, до конца раунда, оператор не может вводить никакие данные в робота, а программа робота должна запускаться только по нажатию стартовой кнопки.
5.4.3. После готовности роботов, судья определяет расстановку роботов в начале раунда.
Примеры расстановки роботов:
1.  2.
2.  3.
3. 
4.  5.
5.  6.
6. 
5.4.4. По команде судьи операторы выставляют роботов на стартовые позиции и сообщают о готовности.
5.4.5. По команде судьи, нажатием на стартовую кнопку, операторы запускают роботов. Не допускается нажатие на любые другие кнопки, а также выбор другой программы для запуска.
Судейство
6.1. Оргкомитет оставляют за собой право вносить в правила состязаний любые изменения, если эти изменения не дают преимуществ одной из команд.
6.2. Контроль и подведение итогов осуществляется судейской коллегией в соответствии с приведенными правилами.
6.3. Судьи обладают всеми полномочиями на протяжении всех состязаний; все участники должны подчиняться их решениям.
6.4. Судья может использовать дополнительные раунды для разъяснения спорных ситуаций.
6.5. Если появляются какие-то возражения относительно судейства, команда имеет право в устном порядке обжаловать решение судей в Оргкомитете не позднее окончания текущего матча.
6.6. Переигровка раунда может быть проведена по решению судей в случае, если в работу робота было постороннее вмешательство, либо когда неисправность возникла по причине плохого состояния игрового поля, либо из-за ошибки, допущенной судейской коллегией.
6.7. Члены команды и руководитель не должны вмешиваться в действия робота своей команды или робота соперника ни физически, ни на расстоянии. Вмешательство ведет к немедленной дисквалификации.
Правила отбора победителя
7.1. По решению оргкомитета, ранжирование роботов может проходить по разным системам в зависимости от количества участников и регламента мероприятия, в рамках которого проводится соревнование. При наличии достаточного времени, соревнования проводятся по системе «каждый с каждым».
Приложение 1.3.3
к положению о Фестивале по робототехнике
Аннотация
Робот – манипулятор – это автоматическое устройство, способное имитировать определенные действия человека, которые используются для захвата и переноса объектов или управления инструментами. Манипулятор – один из самых первых промышленных роботов. Благодаря развитию науки и техники манипулятор может управляться не только определенными программами, но также и различного рода интерфейсами, вплоть до нейроинтерфейсов. Используя манипуляторы можно облегчить тяжелый физический труд рабочих выполняющих однообразные манипуляции, повысить автоматизацию производства, выполнять сложные операции во вредной для человека среде. Технология использования манипуляторов широко применяется в машиностроении, металлургии, электронике, легкой промышленности, атомной энергетике и других секторах.
Данное соревнование проводится для популяризации концепции автоматизации производства и творчества, помогает участникам узнать больше о роботах об их роли в современном мире, развить навыки программирования решая задачи моделирования интеллектуальной системы сортировки объектов на высокотехнологичном производстве.
Участники занимаются созданием модели реального производственного процесса, настройкой и программированием робота – манипулятора и сопутствующего оборудования, работая при этом в команде.
Судьи соревнования будут оценивать не только практические навыки, но и умение наладить работу внутри команды. Поэтому важно чётко скоординировать работу внутри команды для эффективной совместной работы.
В качестве робототехнической платформы для соревнований выбран образовательный робот – манипулятор Dobot Magician.
Цели и задачи
Целью проведения соревнований является формирование благоприятных условий для развития интереса к робототехнике и программированию через овладение научно – техническими знаниями и умениями в области программирования роботов – манипуляторов Dobot Magician.
Задачи
1. Создать условия для развития интереса к техническим видам творчества и естественно научным дисциплинам в молодежной среде.
2. Привлечь внимание к новому направлению в образовательной робототехнике связанному с созданием моделей реальных производственных линий.
3. Определить команды способные успешно представить Россию на международных соревнованиях по данному направлению.
4. Ориентировать учащихся на дальнейшее обучение и профессиональное развитие в области робототехники и программирования.
5. Создать условия для развития инженерного мышления участников, совершенствования их навыков пространственного моделирования, программирования сложных робототехнических систем.
6. Создать условия для обмена педагогическим опытом в использовании эффективных методов работы и технологий взаимодействия обучающихся, проявляющих интерес к робототехнике, программированию и инженерному творчеству.
7. Содействовать развитию прочных взаимосвязей между организациями, развивающими направление «Робототехника» в регионе.
Время и место проведения
- Дата проведения соревнований уточняется, предположительно весна 2019 года.
- Место проведения соревнований: г. Новосибирск, ул. Николаева, д. 12, 4 этаж (РРЦ «Детский технопарк»).
- Соревнования проводятся в течение одного дня с 10.00 до 17.00.
- Участники соревнований
- Каждая команда состоит из 1 наставника и 2 участников.
- Команды делятся на возрастные группы: 10 +, 14 + и 18 +.
- Количество команд, заявленных от одной организацией не должно превышать двух команд в одной возрастной группе.
- Условия участия команд
- К участию в соревнованиях допускаются команды, предварительно подавшие заявки. Ссылка на форму заявки будет опубликована в рассылке с информацией о проведении соревнований.
- Изменение состава команд допускается, в этом случае в заранее подается уточненная заявка по электронной почте.
- Настоятельно рекомендуется включать в команды участников, имеющих хороший навык программирования, опыт занятий робототехникой не мене года и опыт работы с роботом – манипулятором Dobot Magician.
- Ответственность за жизнь и здоровье участников команд несёт на себе сопровождающий наставник.
- Каждая команда должна привести с собой:
ü документы – направление от образовательной организации и заполненные заявления на обработку персональных данных на каждого участника;
ü оборудование – ноутбук, манипулятор Dobot Magician (возможно участие без манипулятора, но об этом необходимо предупредить в форме заявки).
- Расходы, связанные с участием в соревнованиях (питание и проезд до места проведения и обратно) несут командирующие организации или сами участники.
- Команда считается допущенной до соревнований в случае подтверждения заявки организатором.
Судейская команда
Судейская команда региональных соревнований состоит из компетентных специалистов профильных направлений – преподавателей, экспертов с производств, научных работников.
Правила подсчёта баллов
За перенос одного блока из области первоначального расположения в область складирования не соответствующую цвету блока начисляется 1 балл, а в соответствующую область – 2 балла. При этом количество балов увеличивается на 2 балла при размещении блоков одного цвета друг на друга. То есть команда набирает 2 балла за укладку одного блока в целевую область, и оценка будет возрастать на 2 × за высоту для каждого уложенного слоя (высота укладки должна быть не более 8 слоев). Например, за укладку, изображённую на рисунке команда получит 13 баллов.
Рис.3.8. Пример укладки строительных блоков
Устранение неисправностей: во время соревнований запрещено прикасаться к роботу. Если команде необходимо перезагрузить робота, за каждую перезагрузку вычитаться 10 баллов штрафа.
Общий балл за каждый раунд = сумме баллов за перенос блоков – снятые штрафные баллы.
Общий балл по итогам соревнований: будет считаться сумма баллов в двух раундах соревнований.
Регламент направления «Интеллектуальная сортировка», возрастная категория 14 +.
Конкурсное задание
Необходимо с помощь двух манипуляторов и конвейерной линии выполнить передачу, сортировку и складирование строительных блоков. Каждый манипулятор выполняет свою задачу в автономном режиме. Первый манипулятор берёт блоки из области первоначального размещения блоков и перемещает их на конвейерную линию, подключённую данному манипулятору. Второй манипулятор поднимает блоки с конвейерной лини, определяет их цвет и перекладывает в соответствующую цвету блока область складирования складируя их друг на друга.
Ко второму манипулятору подключены датчик цвета и датчик расстояния.
Время выполнения задания 3 минуты. Количество блоков в зоне первоначального размещения 30 штук.
В качестве строительных блоков используются кубики (см. Рис.4.7. Строительные блоки)
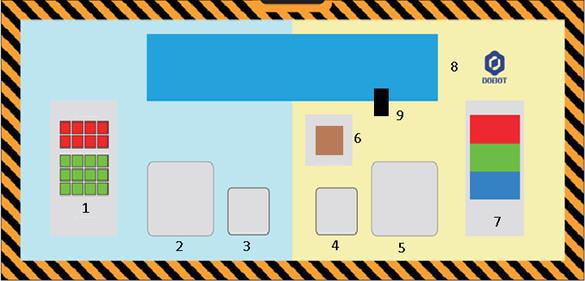
- Рис.3.9. Схема поля «Интеллектуальная сортировка», возрастная категория 14 +
Обозначения на схеме:
1 – область первоначального размещения блоков;
2, 5 – области размещения манипуляторов;
3, 4 – области размещения воздушных компрессоров;
6 – место расположения датчика цвета;
7 – область складирования блоков, разделённая по цвету;
8 – конвейерная линия;
9 – датчик расстояния.
Правила подсчёта баллов
За перенос одного блока из области первоначального расположения в область складирования не соответствующую цвету блока начисляется 1 балл, а в соответствующую область – 2 балла. При этом количество балов увеличивается на 2 балла при размещении блоков одного цвета друг на друга. То есть команда набирает 2 балла за укладку одного блока в целевую область, и оценка будет возрастать на 2 × за высоту для каждого уложенного слоя (высота укладки должна быть не более 8 слоев). Например, за укладку, изображённую на рисунке команда получит 13 баллов.

Рис.3.10. Пример укладки строительных блоков
Устранение неисправностей: во время соревнований запрещено прикасаться к роботу. Если команде необходимо перезагрузить робота, за каждую перезагрузку вычитаться 10 баллов штрафа.
Общий балл за каждый раунд = сумме баллов за перенос блоков – снятые штрафные баллы.
Общий балл по итогам соревнований: будет считаться сумма баллов в двух раундах соревнований.
Регламент направления «Интеллектуальное производство», возрастная категория 18 +.
Конкурсное задание
В направление «Интеллектуальное производство» команде нужно разработать модель технологической линии некоторого интеллектуального производства. Необходимо с помощь двух манипуляторов и конвейерной линии выполнить передачу, сортировку и складирование строительных блоков по определённой технологической схеме. Каждый манипулятор выполняет свою задачу в автономном режиме.
Дополнительно моно использовать камеру, не более трёх датчиков (цвета, расстояния, касания и контроллер для синхронизации управления.
Время выполнения задания 3 минуты. Количество блоков в зоне первоначального размещения 40 штук, среди них есть несколько «дефектных» блоков другого отличного от красного, зелёного и синего цвета.
В качестве строительных блоков используются кубики.

Рис.3.11. Строительные блоки

Рис.3.12. Схема поля «Интеллектуальное производство», возрастная категория 18 +
Обозначения на схеме:
1 – область первоначального размещения блоков;
2, 5 – области размещения манипуляторов;
3, 4 – области размещения воздушных компрессоров;
6 – область хранения дефектных блоков;
7 – область складирования блоков, разделённая по цвету;
8 – конвейерная линия.
Команда выполняет следующие задачи:
Загрузка материала: управление манипулятором для перемещения блоков со склада материала и транспортировка его с помощью конвейерной ленты.
Сортировка: проверка поступающих блоков с конвейерной ленты, определение их цветов и выявление дефектных блоков в соответствии с правилами осмотра, размещение дефектные материалов в области временного хранения объектов.
Перемещение и сборка продукции: завершение цикла производства путем укладки блоков разных цветов в соответствии с технологической схемой. Продуктом является стопка из трёх разноцветных блоков, сложенных в определённом порядке.

Рис.3.12. Варианты продукции
Правила подсчёта баллов
Конкретная технологическая схема хранения продукции в области складирования будет предоставлена на соревновании.
Примечание 1: Если блоки не уложены таким образом, чтобы получился требуемый продукт, то оценки не будут учитываться.
Примечание 2: Различные типы продуктов необходимо укладывать в соответствующую область; а именно, основной цвет области укладки должен соответствовать цвету первого слоя объектов. Если продукты не были размещены в соответствующую область, команде не начисляется баллов.
Примечание 3: Если в течение производственного периода, дефектные блоки не определены и не удалены в зону хранения дефектных блоков, и смешались с какими-то продуктами, то в этом случае в двойном размере вычитаются баллы за каждый продукт, смешанный с дефектным блоком.
Подсчет баллов за укладку продуктов:
Продукты одного и того же типа могут быть уложены в одну и ту же область в соответствии с требованиями. Высота укладки не должна превышать 2 слоя. Команда может получить 5 дополнительных очков за каждый 2 завершенный слой продуктов.
Подсчет баллов за сортировку дефектных блоков:
Команда получит 3 балла за отсортировку блоков материалов (за выполненную проверку каждого дефектного блока и размещение дефектного блока в обозначенную область хранения).
Дополнительные баллы назначаются за использование инновационных решений. Количество дополнительных баллов может составлять от 0 до 100 баллов. Инновационность решения будет определена оргкомитетом соревнований. Для этого команда должна представить технический отчет на 2 – 4 страницы по внедрёнными инновационным решениям. Отчёт надо предоставит до начала соревнования. Непредставление технических отчетов будет считаться отказом от дополнительных баллов.
Команда может создавать свои инновационные разработки для концевого зажима, датчиков, основных контроллеров и т.д. Может использовать модуль технического зрения. Тем не менее, им не разрешается добавлять дополнительные механические конструкции или изменять указанный производственный процесс (например, добавление направляющих скольжения или лотков и/или изменение конвейерной ленты), поскольку это может сделать соревнование несправедливым.
Пилотирование в FPV очках
Элементы
Дрон-рейсинга
Внесение изменения в конструкцию коптера
| 1 ч
|
| | Установка и настройка видеокамеры и видеопередатчика Установка транспондера
|
| Тестовый полет
|
| Прохождение трассы в FPV-очках на точность и скорость
|
Тулбокс
Команды участвуют в соревнованиях со своим набором БПЛА Клевер3 с обязательной защитой винтов (или эквивалентным под управлением Raspberry pi и навигацией по Aruco меткам), ноутбуком с предустановленным программным обеспечением (QGroundControl, Putti), зарядным устройством, аппаратурой FPV, монтажным инструментом и расходными материалами.
3. ВВОД БАС В ЭКСПЛУАТАЦИЮ
3.1 Перед включением питания аппарат должен соответствовать нормам безопасности, отраслевым инструкциям и спецификациям.
3.2 К полётам в любой части (модуле) конкурсного задания допускаются:
• Полностью исправные аппараты;
• Все элементы конструкции надёжно закреплены;
• Изоляция проводов и компоновка комплектующих целостна;
• Попадание какой-либо части БАС в винтомоторную группу исключены.
-
3.3 ЗАПРЕЩАЕТСЯ: Подключение питания к БАС с установленными пропеллерами за пределами полётной зоны!
Модуль А
4. Программирование полёта в автономном режиме
4.1 Время выполнения модуля – 2,5 часа
4.2 Проверяемые навыки: программирование; администрирование Linux; составление полетных миссий; чтение документации.
4.3 Основная задача модуля: Запрограммировать БПЛА
для автономного полёта в ограниченном пространстве в помещении
4.4 В рамках модуля участнику необходимо:
| -
| - Задача
| - Действие
| - Комментарий
|
| - 1
| - Установить на БПЛА оборудование, необходимое для автономного полета
| - Raspberry pi3
| - Разъемы для подключения BEC, светодиодной лены, питания камеры, передатчика FPV и Raspberry pi3 могут быть смонтированы заранее
|
| - Светодиодная лента
|
| - BEC Преобразователь напряжения
|
| - КамераRPi
|
| - 2
| - Создание программного кода в соответствии с миссией
| - Настроить фокусировку камеры
| - Допускаются предварительно настроенный полетный контроллер и прошивка Raspberry pi3
|
| - Настроить все необходимые параметры в полётном контроллере
|
| - Записать прошивку с LPE на БПЛА
| - Проверить настройки коптера
|
| - 3
| - Задать карту меток
| - Файл aruco.launch
| -
|
| - 4
| - Назначить установочные параметры
| - Файлы aruco.launch, main_camera.launch, clever.launch
| -
|
| - 5
| - Продемонстрировать распознавание поля меток
| - используя адрес: http://192.168.11.1:8080
| - Через браузер
|
| - 6
| - Продемонстрировать зависание БПЛА над полем меток
| - 1.Взлет в Stabilize
| - На экране должно быть отображение переключения режимов
|
| - 2.Удержание позиции Position
|
| - 3. Посадка режим Stabilize
|
| - 8
| - Продемонстрировать результаты get_telemetry
| - Проверка координат и вывод на экран
| - Точка задается экспертами
|
| - 9
| - Запрограммировать БПЛА для автономного полёта в ограниченном пространстве в помещении
| - Автономный взлет со световой индикацией
- Пролет через элементы
- Световая индикация в заданных точках
- Автономная посадка в заданную точку со световой индикацией
| - Высота 2 метра.
- Зависание не менее 5 секунд
|
Требования к команде
Команда 3-6 человек первого - второго года обучения робототехнике на базе Lego Mindstorms или на любой иной платформе.
По команде судьи участники одновременно запускают роботов. Капитан команды может остановить попутку сказав «Стоп».
Возраст участников 8-12 лет.
Требования к роботам
1. Один из роботов может быть управляемый, баллы, получаемые управляемым роботом в два раза меньше, чем у автономных.
2. Роботы должны помещаться в стартовую зону 300* 900 мм
3. Роботы не должны повреждать, пачкать игровое поле и других роботов.
4. Запрещено трогать, поправлять роботов руками. «Заевшего» автоматического робота можно «подтолкнуть» управляемым.
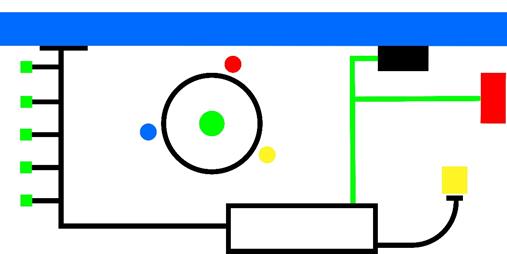
Описание поля
Общий размер поля 3000*1500 мм.
Стартовая зона находится по центру у бортика. Поле огорожено бортиком высотой до 200 мм.
Недалеко от центра поля расположен окружность диаметром 650 мм, обозначенного линией черного цвета шириной 30 мм. Круг зеленого цвета диаметром 100 мм в центре окружности
За пределами окружности, расположены части пирамиды. Подложки, на которых лежат части, имеют круглую форму, диаметр 100 мм, и окрашены в синий, красный и желтый цвет для нижней, средней и верхней части соответственно. Расстояние от них до линии 50 мм.
Части пирамиды нижняя и средняя– параллелепипед с прорезными окнами на боковой поверхности, высотой 70 мм и стороной основания 50 мм, верхняя часть – пирамидальной формы с прорезными окнами на боковой поверхности высотой 70 мм и стороной основания 50 м
Из стартовой зоны в правую часть поля ведет черная линия шириной 30 мм, в конце нее рубеж шириной 100 мм. Стартовая позиция для приклеивания «носа».
Со стартовой зоны влево черная линия ведет к месту добычи и погрузки строительных блоков, на ее длинном участке расположено пять каменоломен (ответвлений влево, на конце каждого зеленый квадрат со стороной 70 мм). На них лежат строительные блоки – лего-кубики размером 4 на 4 деления лего.
Черная линия оканчивается рубежом перед рекой – синей линией шириной 200 мм, это место погрузки добытых блоков на «плот», являющийся частью оборудования поля.
Высота робота – плота 100 мм(уточняется), размер 200*200 мм. На повернутой к берегу стороне плота, с правого краю, расположена кнопка отправления. Размер кнопки около 40мм.
После запуска робота-плота, он едет по синей линии до зоны выгрузки блоков, это черный прямоугольник 150 х 300 мм, находящегося на той же стороне реки. К черной зоне выгрузки и красной строительной площадке от зоны старта ведет зеленая линия, обе зоны представляют собой прямоугольники размером 150*300мм.

Задания
Построить пирамиду
На окружности шириной 30 мм, диаметром 650 мм на трех цветных кругах диаметром 100 мм расположены три части пирамиды, в центре окружности зеленый круг диаметром 100 мм.
Задача робота привезти сначала нижнюю часть, расположенную на синем круге, после среднюю, расположенную на красном, последним верхнюю – на желтом. Задача установить одну часть на другую в зеленой зоне сборки.
Приклеить нос сфинксу
«Нос» грузится на робота оператором, представляет из себя пластиковую деталь с «липучкой». Задача доехать до сфинкса, выровняться с помощью рубежа и приклеить нос на место с ответной частью «липучки»..
Баллы за выполнение заданий
| №
| Задание
| Баллы
|
| 1
| Постройка пирамиды
|
|
| 1.1
| Привезти нижнюю часть
| 10
|
| 1.2
| Привезти среднюю часть
| 10
|
| 1.3
| Привезти верхнюю часть
| 10
|
| 1.4
| Установить нижнюю часть в зеленою зону
| 10
|
| 1.5
| Установить среднюю часть на нижнюю в зеленой зоне
| 30
|
| 1.6
| Установить верхнюю на среднюю часть
| 50
|
| 2
| Погрузить камни и сплавить их по реке
|
|
| 2.1
| Привезти блок (за каждый блок)
| 10
|
| 2.2
| Погрузить блок (за каждый блок)
| 5
|
| 2.3
| Отправить плот
| 15
|
| 2.4
| Убрать строительные блоки с площадки выгрузки
| 20
|
| 2.5
| Доставить блок на стройплощадку (за каждый)
| 5?
|
| 3
| Приклеить нос сфинксу
|
|
| 3.1
| Попытка прикрепить нос сфинксу
| 20
|
| 3.2
| Нос остался держаться
| 20
|
Привезти часть пирамиды – робот взял деталь пирамиды, перевез ее на место и поставил (попытался поставить)
Установленной считается часть пирамиды, которая осталась стоять на месте в течении не менее 5 секунд, после того как робот отъехал от нее.
Регламент игр в номинации «Лабиринт».
Описание задания
В этом состязании участникам необходимо подготовить автономного мобильного робота, способного добраться из одного конца лабиринта в другой и вернуться обратно по кратчайшему пути.
Содержание
Условия проведения
Оценка выполнения попытки
Требования к полю состязания
Упрощение правил для регионального этапа

1. Условия проведения
1.1. Объявление окончательных условий состязания
1.1.1. Расположение стенок лабиринта объявляется перед каждым раундом после периода отладки. Объявленное расположение используется для всех команд в течение одного раунда.
1.1.2. Длина кратчайшего пути определяется конфигурацией лабиринта, объявленной для первого раунда и остается неизменной в течение одного тура состязания.
1.1.3. Дополнительное задание объявляется в начале состязания, до периода отладки первого раунда.
1.2. Подготовка к попытке
1.2.1. Перед началом попытки участ







