Раздел 4. Разработка технологических процессов обработки заготовок в условиях гибких производственных систем и на автоматических линиях
Тема 4.1. Разработка технологических процессов изготовления деталей в условиях гибких производственных систем
Важной особенностью сегодняшнего производства, направленного на удовлетворение возросших запросов потребителей, является рост числа мелких серий обрабатываемых деталей и увеличение их разнообразия, что вызывает необходимость в частой переналадке технологического оборудования.
Поэтому в настоящее время к оборудованию предъявляют новое требование - гибкость, т.е. переналаживаемость в минимально возможное время. Этому требованию удовлетворяют гибкие производственные системы (ГПС), предназначенные для комплексной обработки различных деталей.
ГПС способна автоматически переналаживаться при переходе на обработку новой детали, входящей в номенклатуру деталей, изготовляемых на данной ГПС.
Проектирование технологических процессов в условиях ГПС является новым методом подготовки и организации производства, ориентированным на безбумажную технологию и безлюдное производство.
Общие сведения о ГПС
ГПС - есть совокупность в разных сочетаниях оборудования с ЧПУ, роботизированных технологических комплексов, гибких производственных модулей, отдельных единиц технологического оборудования и систем обеспечения их функционирования в автоматическом режиме в течение заданного интервала времени, обладающая свойством автоматизированной переналадки при производстве изделий произвольной номенклатуры в установленных пределах значений их характеристик.
(Гибкость:
-возможность обрабатывать на одной и той же технологической линии различные детали в различных сочетаниях;
-возможность изменения в любой момент стратегии производства в зависимости от необходимости;
-модифицирование обрабатываемых деталей без привлечения дополнительных значительных затрат;
-изменение состава технологической линии в зависимости от требований;
-повторное использование значительного процента существующих капиталовложений в том случае, если приходится полностью менять тип продукции.)
Классификация ГПС
По организационной структуре ГПС различают:
1 ГПМ – гибкий производственный модуль.
(Единица технологического оборудования для производства изделий произвольной номенклатуры в установленных пределах значений их характеристик с программным управлением, автономно функционирующая, автоматически осуществляющая все функции, связанные с их изготовлением, имеющая возможность встраивания в гибкую производственную систему.)
2 ГАУ – гибкий автоматизированный участок.
(Гибкая производственная система, функционирующая по технологическому маршруту, в котором предусмотрена возможность изменения последовательности использования технологического оборудования.)
3 ГАЛ – гибкая автоматизированная линия.
(Гибкая производственная система, в которой технологическое оборудование расположено в принятой последовательности технологических операций.)
4 ГАЦ – гибкий автоматизированный цех
(Гибкая производственная система, представляющая собой в различных сочетаниях совокупность гибких автоматизированных линий, роботизированных технологических комплексов, гибких автоматизированных участков, роботизированных технологических участков для изготовления изделий заданной номенклатуры.)
5 ГАЗ – гибкий автоматизированный завод.
(Гибкая производственная система, представляющая собой совокупность ГАЦ.)

По гибкости ГПС делятся на системы:
а) высокой гибкости (у которых номенклатура продукции, приведенная на один обрабатывающий модуль, превышает 100 наименований.)
б) средней гибкости – (номенклатура продукции, приведенная на один модуль, 20 – 100 наименований.)
в) малой гибкости – (номенклатура – до 20 наименований;)
По комплексности:
-операционная (выполняет одну или несколько технологических операций изготовления изделия)
-предметная (изготавливает отдельные детали сборочных единиц)
-узловая (изготавливает комплекты деталей сборочных единиц и осуществляет сборку узлов)
По уровню автоматизации:
1 уровень– автоматизированная переналадка при изготовлении освоенных изделий,
2 уровень– автоматическая переналадка при изготовлении освоенных изделий,
3 уровень– автоматизированная переналадка при переходе на изготовление новых изделий.
Структура ГПС
В состав ГПС входят:
1 технологическое оборудование (ТО)
2 автоматизированная транспортно-складская система (АТСС) служит для создания запаса деталей на несколько смен, хранения полуфабрикатов, подачи их на рабочие места и выдачи готовых деталей
3 автоматизированная система инструментального обеспечения (АСИО) —следит за состоянием режущего инструмента на станках и осуществляет своевременную замену затупившихся или сломанных инструментов
4 автоматизированная система удаления отходов (АСУО) —обеспечивает полное удаление стружки из зоны обработки и тщательную очистку базовых поверхностей.
5 система автоматизированного контроля (САК)
6 автоматизированная система управления (АСУ)
7 автоматизированная система управления технологическими процессами (АСУ ТП)
8 автоматизированная система научных исследований (АСНИ);
9 система автоматизированного проектирования (САПР);
10 автоматизированная система технологической подготовки производства (АС ТПП);
Устанавливают следующий состав частей ГПС, организованных в виде типовых функциональных подсистем:
система подготовки производства;
-обрабатывающая подсистема,
-управляющая подсистема,
обеспечивающая функционирование.
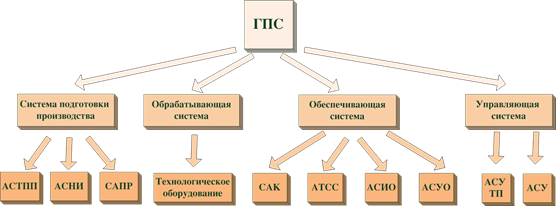
Рисунок— Структура ГПС
Транспортные устройства ГПС
Автоматизированные устройства для транспортирования палет с закрепленными изделиями в ГПС:
тянущие конвейеры — перемещение изделий осуществляется на палетах, закрепленных на несущих плитах;
• ленточные конвейеры — предметы перемещаются одиночно либо в контейнерах, лента опирается на ролики либо плоские беговые дорожки;
• цепные конвейеры;
• роликовые конвейеры— предметы могут перемещаться непосредственно по роликам
• подвесные конвейеры— детали могут перемещаться поодиночке либо в контейнерах с использованием транспортных тележек, подвесных крюков и т.д.;
достоинства: не занимают производственные площади
недостатки: хуже адаптируются к возможным изменениям в составе ГПС, требуют частичного ограждения для соблюдения безопасности работ.
• рельсовые тележки используются в первую очередь в производственных системах с жесткой структурой; тележки перемещаются вдоль прямолинейной трассы между рабочими местами;
достоинства: -более простая системай управления для отслеживания маршрута
- высокая скорость движения и точность позиционирования
недостатки: -рельсовые пути занимают дополнительную производственную площадь и мешают проезду других, например цеховых и заводских, транспортных средств
- Изменение планировки ГПС, обслуживаемых рельсовой тележкой, сложнее, чем для безрельсовых
• безрельсовые тележки (робокары). В простейшем случае перемещение тележки определяется штрих-кодами или магнитными кодами. В определенных местах трассы установлены считывающие устройства, которые управляют функционированием механизмов перемещения тележки. Более современные конструкции тележек обеспечивают сход с трассы движения, самостоятельное движение к определенному месту и возврат на трассу. Управление перемещениями в этом случае осуществляется оптическими, лазерными, индукционными и другими системами;
• краны-штабелеры забирают палеты с входа в магазин и перемещают их в соответствующие ячейки. Загрузка и выгрузка осуществляются с помощью вил-клещей.
Безрельсовые тележки получили наибольшее распространение для перемещения грузов в ГПС.
Устройства приема и выдачи заготовок ГПС
Экономические показатели использования оборудования в значительной мере зависят от времени, необходимого на снятие обрабатываемой заготовки со станка и установку новой. Применение систем автоматизированной загрузки-выгрузки снижает время простоев дорогостоящих станков между циклами обработки заготовок.
Для автоматизации загрузки необходимо автоматизировать три ее элемента:
• захват заготовки и транспортировку ее в зону обработки;
• установку заготовки;
• закрепление заготовки.
Для автоматизации разгрузки необходимо автоматизировать следующие элементы:
• открепление заготовки;
• снятие заготовки с установочных элементов;
• транспортировку заготовки.
Конструкция загрузочных устройств зависит от формы и размеров заготовок и условий производства.
Для обработки тел вращения в условиях ГПС функции загрузки и выгрузки~выполняются:
-специализированным роботом, выполненным как одно целое со станком,
-портальным роботом
-универсальным отдельно стоящим роботом.
Первая разновидность робота обслуживает станок спереди. Универсальный робот также подает детали в зону обработки, находясь спереди станка. Такое решение используется при обработке небольших деталей, поскольку доступ в зону обработки затруднен. Портальные роботы расположены над станком и подают заготовки сверху. Это обеспечивает легкий доступ в зону обработки.
__________________________________________________________________
Раздел 4. Разработка технологических процессов обработки заготовок в условиях гибких производственных систем и на автоматических линиях





