Механизм подъема и поворота захватов предназначен для осуществления перемещения их вдоль вертикальной оси манипулятора и поворота вокруг нее (рис. 6.4.).
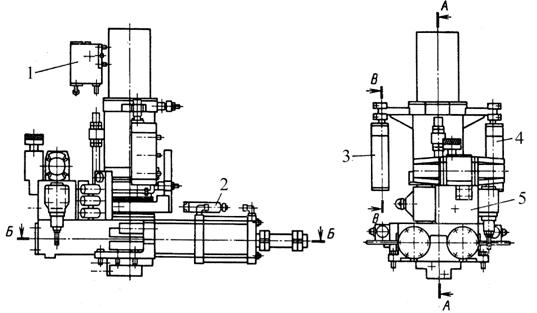
Рис. 6.4. Механизм подъема и поворота захватных устройств
Механизмы выдвижения-втягивания захватов крепятся на торце подвижного цилиндра 9 (рис. 6.5., а), который является пневмоцилиндром механизма подъема. В устройство подъема входит также шток 13 с поршнем 12, установленный на подшипниках 17 и 19 в корпусе 18, тормозной клапан 1 (см. рис. 6.4.), встроенное тормозное устройство — дроссель 21 (рис. 6.5, б), а также два гидродемпфера 3 и 4 (см. рис. 6.4.).
Для подъема захватов сжатый воздух через отверстие в крышке 20 (см. рис. 6.5., а) и центральное отверстие в штоке 13 подается в бесштоковую полость цилиндра 9.
Верхнее положение цилиндра с закрепленными на нем механизмами выдвижения-втягивания захватов определяется положением винта 6, который, упираясь в корпус тормозного клапана, препятствует дальнейшему перемещению цилиндра.
При подходе цилиндра 9 к упору винт нажимает на золотник 26 (см. рис. 6.5., в) тормозного клапана, и останов происходит без удара.
Тормозной клапан 1 (см. рис. 6.2.) работает следующим образом: при подъеме захватов винт 6 (см. рис. 6.5., а) цилиндра подъема нажимает на шток золотника 26 (см. рис. 6.5, в), который, поднимаясь, вытесняет масло из полости " F " в полость " К " через дроссель 25 и кольцевой зазор переменного сечения между конической частью золотника 26 и отверстием " J " в корпусе клапана.
Время (скорость) торможения определяется временем перетекания масла и регулируется с помощью дросселя 25. При этом последний настраивается так, чтобы конечная скорость обеспечивала безударный останов подвижного цилиндра с винтом в верхнем положении.
При опускании (при отходе винта 6 (см. рис.6.5, а) от тормозного клапана) возврат золотника 26 в исходное положение осуществляется с помощью сжатого воздуха, постоянно подаваемого от сети в полость " L " под поршень 22, разделяющего масляную и воздушную среды через угольник, ввернутый в отверстие " М ". Для ускоренного возврата золотника масло в полость " F " перетекает через обратный клапан 23.
Торможение в конце хода при опускании осуществляется с помощью воздушной подушки, возникающей между верхней уплотнительной манжетой на поршне 12 (см. рис. 6.5., а) и манжетой 11 при вхождении последней в полость заглушки 7 в пневмоцилиндре 9 подъема.
Интенсивность торможения при этом регулируется дросселем 21 (см. рис. 6.5., б).
Плавность хода и регулировка скорости подъема и опускания осуществляются с помощью двух гидродемпферов 3 и 4 (см. рис. 6.4.).
Корпуса гидродемпферов прикреплены к вертикальным стойкам станины, а штоки 28 (рис. 6.5., г) соединены с ушами коллектора 10 (см. рис. 6.5., а). При подъеме и опускании пневмоцилиндра 9 вместе со штоками 28 происходит перетечка масла через дроссель из полости " N " в полость " Р " и наоборот. С помощью этого дросселя регулируется скорость подъема и опускания захватов.
Нижнее положение пневмоцилиндра 9 (см. рис. 6.5., а) определяется упором заглушки 7 в поршень 12.
При позиционировании механизма подъема в верхнем и нижнем положениях срабатывает датчик положения 3, в паз головки которого входят флажки 2 и 4, закрепленные на скалке 1.





| Рис. 6.6. Устройство механизма поворота захватных устройств: a – сечение Б-Б; б – сечение Е-Е; в – сечение Д-Д: г – вид Ж
| |

Механизм поворота состоит из двух малых пневмоцилиндров 6 (рис.6.6., а) и двух больших пневмоцилиндров 7. Штоки 1 поршней 4 малых пневмоцилиндров выполнены в виде реек, в задних полых концах которых расположены тормозные датчики 3 типа БК-А-0, а передние концы штоков служат плунжерами полостей гидроцилиндра с полостями R торможения при повороте захватов. На штоках 8 больших пневмоцилиндров 7 закреплены планки 10, которые, упираясь в регулируемые цанговые гайки-упоры 9, ограничивают перемещение штоков 8. Шток-рейка 1 зацепляется с шестерней 2, закрепленной на шток 13 (см. рис. 6.5., а). Передача крутящего момента со штока на подвижный цилиндр 9 осуществляется посредством клина 11 (рис. 6.6, б), соединяющего шток 13 (см. рис. 6.5., а) с зажимом 16 и скалки 15, закрепленной на зажиме. Далее крутящий момент передается на подвижный цилиндр 9 через ролики 13 (рис. 6.6., в), один из которых расположен на эксцентричной оси для выборки зазора, и водило 14 (см. рис. 6.6., а), являющееся крышкой цилиндра 9. Ролики 13 (см. рис. 6.6., в) необходимы для передачи крутящего момента при подъеме цилиндра 9.
Для осуществления поворота захватов сжатый воздух подается в бесштоковую полость одного из пневмоцилиндров 6 (см. рис. 6.6., а). Шток-рейка 1 с поршнем 4, перемещаясь при этом до упора в шток 8, приводит во вращение шестерню 2, а следовательно, и связанный с ней, как указывалось выше, подвижный пневмоцилиндр 9 (см. рис. 6.5., а) с закрепленными на нем механизмами выдвижения-втягивания захватов.
Для уменьшения сопротивления при повороте сжатый воздух из пневмоцилиндров 6 (см. рис. 6.6, а) выпускается через клапан 2 быстрого выпуска воздуха (см. рис. 6.4.), принцип действия которого аналогичен описываемому выше.
Фиксация любых четырех точек в рабочей зоне робота при повороте захватов в горизонтальной плоскости осуществляется последовательной подачей сжатого воздуха в соответствующие полости пневмоцилиндров 6 и 7 (см. рис. 6.6., а). При этом положение захватов по повороту вокруг вертикальной оси контролируется одним из трех датчиков, имеющих маркировку S 1, S 2, S 3 в пазы головок 14 (рис. 6.6., г) которых входят флажки 12 (см. рис. 6.6., в) на дисках обоймы 5 (см. рис. 6.5., а), установленной на зажиме 16.
На рис. 6.7. представлена схема положений оси механизма выдвижения-втягивания захватов в зависимости от положения планок 10 (см. рис. 8, а) относительно гаек-упоров 9.

Рис. 6.7. Схема положений оси механизма выдвижения-втягивания захватов при повороте в горизонтальной плоскости
При упоре планки 2 (см. рис. 6.7.) в гайку 1 механизм выдвижения-втягивания захватов занимает положение I, при упоре планки 5 в гайку 6 — положение IV. При этом два флажка 12 (см. рис. 6.6., в) взаимодействуют со средним датчиком S 1 поворота (см. рис. 6.6., г). При упоре планки 2 (см. рис. 6.7.) в гайку 3 механизм выдвижения-втягивания захватов занимает положение III. При этом верхний флажок 12 (см. рис.6.6., в) взаимодействует с датчиком S 2. При упоре планки 5 (см. рис. 6.7.) в гайку 4 механизм занимает положение III. При этом нижний флажок 12 (см. рис. 6.6., в) взаимодействует с датчиком S 3.
Ниже приведен пример осуществления позиционирования в одной из точек при повороте механизма выдвижения-втягивания захватов.
При подаче сжатого воздуха в заднюю полость одного из пневмоцилиндров 6, например верхнего (см. рис. 6.6., а), планка 10 упирается в заранее установленную при настройке переднюю гайку 9. Затем сжатый воздух подается в бесштоковую нижнюю полость пневмоцилиндра 6. Поршень этого пневмоцилиндра начинает перемещаться вперед и своей шток-рейкой 1 приводит во вращение шестерню 2. Вторая шток-рейка (верхняя), связанная с шестерней с другой стороны, начинает отходить назад до упора в передний конец штока 8. Так как площадь поршня пневмоцилиндра 7 в 2 раза больше площади поршня пневмоцилиндра 6, то поворот шестерни прекращается. Ось механизма занимает положение III (см. рис. 6.7.).
Безударный останов захватов при повороте достигается с помощью тормозного устройства 5 (см. рис. 6.4.). Конструкция тормозного устройства представлена на рис. 6.8.
В полостях R гидроцилиндра (см. рис. 6.6., а), заполненных маслом, перемещаются шток-рейки. Эти полости соединяются между собой через каналы " T ", " V " (см. рис. 6.8.) тормозного устройства и золотниковый гидрораспределитель 2. При перемещении реек масло перетекает из одной полости R (см. рис. 6.6., а) в другую мимо дросселя 4 (см. рис. 6.8.), при вращении втулки которого вправо и перекрытии каналов " T " и " V " можно регулировать скорость поворота захватов.
Торможение осуществляется следующим образом. При подходе верхней шток-рейки 1 (см. рис. 6.6., а) к штоку 8 последний нажимает подпружиненный флажок 5 тормозного датчика 3, который дает команду после временной выдержки, заданной в программе, на переключение гидрораспределителя 2 (см. рис. 6.8.). Распределитель переключается в позицию торможения, при которой масло из одной полости R (см. рис. 6.6., а) гидроцилиндра в другую начинает перетекать через регулируемый дроссель 1 (см. рис. 6.8.), вследствие чего в полостях создается противодавление масла, препятствующее перемещению шток-реек. С помощью этого дросселя регулируется интенсивность торможения. Через напорный золотник 3, включенный параллельно дросселю 1, в момент увеличения давления масла часть масла сливается, вследствие чего сглаживается возможный резкий переход от транспортирующей скорости к скорости торможения.
Бачок 7 служит для наполнения системы маслом через обратный клапан 8, когда в гидросистеме возникает разрежение в результате утечек. Кнопка 6 служит для выпуска из гидросистемы воздуха и открывания обратного клапана 8 при заливке масла в полости гидроцилиндра. Обратный клапан 8 предохраняет от выплескивания масла из бачка в момент торможения. Заправка масла в бачок осуществляется через заливную горловину 5, снабженную сетчатым фильтром.






