Наибольшее распространение в промышленности среди регуляторов косвенного действия имеют электрические и электропневматические регуляторы. В состав регулятора косвенного действия входят:
- блок управления;
- исполнительное устройство.
На вход блока управления поступают заданное (уставка) y*(t) и текущее y(t) значения регулируемой величины. Блок управления вычисляет рассогласование e(t) = y*(t) – y(t), на основе которого формирует управляющий сигнал u(t), подаваемый на вход исполнительного устройства.
Исполнительное устройство преобразует управляющий сигнал в конкретное управляющее воздействие на объект (перемещение клапана, задвижки, поворот заслонки, изменение напряжения на якорь двигателя постоянного тока, мощности на нагревательный элемент и т.п.).
В качестве примера рассмотрим регулирование температуры в помещении путем изменения протока горячей воды через батарею отопления. Функциональная схема системы регулирования приведена на рисунке 16. Для перемещения заслонки на трубопроводе используется исполнительный механизм типа МЭО (механизм электрический однооборотный).

Рис. 16 Функциональная схема системы регулирования температуры в помещении
Задание по температуре в помещении сравнивается с текущим значением температуры, полученным при помощи термосопротивления. По рассогласованию регулятор температуры (например, ПИ-регулятор, программно реализованный в ПЛК) формирует задание по положению регулирующего органа (заслонки). Заданное положение сравнивается с текущим, полученным от датчика положения регулирующего органа. На основе рассогласования по положению блок управления (например, также программно реализованный в ПЛК) формирует управляющий сигнал на исполнительный механизм. Для механизма МЭО таким сигналом является выход трехпозиционного реле:

Структурная схема системы регулирования в среде Matlab представлена на рисунке 17.
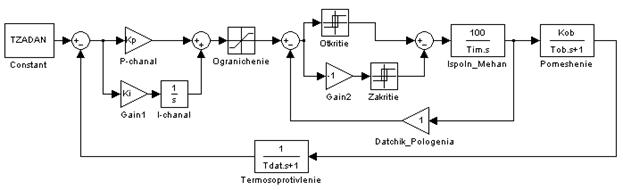
Рис. 17 Структурная схема системы регулирования в среде Matlab
Коэффициенты ПИ-регулятора Кр и Кi настраиваются в соответствии с динамическими характеристиками Kob и Tob объекта управления. Блок ограничения удерживает задание по положению регулирующего органа в пределах от 0 до 100 %. Два реле на схеме формируют сигналы на открытие (верхний канал) и на закрытие (нижний канал) заслонки. Параметр Tim в исполнительном механизме задает время полного хода механизма из полностью закрытого в полностью открытое положение.
Внешний вид исполнительного механизма МЭО приведен на рисунке 18.

Рис. 18 Внешний вид исполнительного механизма МЭО – 40
Электрические исполнительные однооборотные механизмы МЭО предназначены для перемещения регулирующих органов в системах автоматического регулирования технологическими процессами в соответствии с командными сигналами автоматических регулирующих и управляющих устройств. Механизмы исполнительные МЭО перемещают рабочие органы неполноповоротного принципа действия (шаровые и пробковые краны, поворотные дисковые затворы, заслонки).
Принцип работы электрических исполнительных механизмов МЭО заключается в преобразовании электрического сигнала поступающего от регулирующего или управляющего устройства во вращательное перемещение выходного вала. Исполнительные механизмы МЭО устанавливаются вблизи регулирующих устройств и связываются с ними посредством тяг и рычагов. Исполнительные механизмы МЭО изготовляются с датчиком обратной связи (блоком сигнализации положения выходного вала) для работы в системах автоматического регулирования или без датчиков обратной связи - с блоком концевых выключателей для режима ручного управления. Виды блоков сигнализации положения – индуктивный БСПИ, реостатный БСПР, токовый БСПТ.
Состав исполнительного механизма:
- электродвигатель синхронный;
- редуктор червячный;
- ручной привод;
- блок сигнализации положения реостатный БСПР, индуктивный БСПИ, токовый БСПТ или блок концевых выключателей БКВ;
- рычаг.
Управление исполнительным механизмом МЭО контактное или бесконтактное.
Тип управляющего устройства при бесконтактном управлении: пускатель ПБР-2М или ПБР-2М1.
Полная маркировка исполнительного механизма МЭО имеет следующую структуру:
МЭО – XX/YY – ZZ - WW,
где XX – номинальный крутящий момент, [Н·м];
YY – время полного хода выходного вала из полностью закрытого в полностью открытое положение, [с];
ZZ – доля от полного оборота, пройденная выходным валом при движении из полностью закрытого в полностью открытое положение;
WW – год утверждения данной модификации.
Пример обозначения: МЭО – 40/63 – 0,63 – 93.
Одним из наиболее распространенных алгоритмов в практике регулирования технологических параметров является ПИД- регулятор.
Структурная схема ПИД- регулятора приведена на рисунке 19.

Рис. 19 Структура ПИД – регулятора
ПИД- регулятор имеет три параллельно включенных канала:
- пропорциональный (П- канал);
- интегральный (И- канал);
- дифференциальный (Д- канал).
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен уставке, то выходной сигнал этого канала равен нулю.
Однако при использовании только пропорционального регулятора значение регулируемой величины объекта, имеющего статику, никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к уставке, и система стабилизируется при мощности равной тепловым потерям. Температура не может достичь уставки, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
Для устранения статической ошибки используют интегральную составляющую. Она позволяет регулятору «учиться» на предыдущем опыте. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечивать интегральная составляющая.
Дифференциальная составляющая реагирует на скорость изменения рассогласования и противодействует тенденциям в поведении регулируемой величины, которые могут привести в будущем к существенным отклонениям. Эти отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. Чем быстрее регулируемая величина отклоняется от уставки, тем сильнее противодействие, создаваемое дифференциальной составляющей. То есть дифференциальная составляющая стремится предотвратить развитие отклонения. Однако необходимо отметить чрезвычайно высокую чувствительность Д- канала к высокочастотным погрешностям в канале измерения регулируемой величины. Поэтому рекомендуется выполнять низкочастотную фильтрацию входа Д-канала.
Частными случаями ПИД- регулятора являются ПИ-, П-, И-, ПД- регуляторы, которые могут быть получены из ПИД- регулятора установкой нулевых коэффициентов усиления в неиспользуемых каналах.
Операторский уровень АСУ ТП






