ТЕХНИЧЕСКАЯ
МЕХАНИКА
Методические указания и контрольные задания
для студентов-заочников средних профессиональных
учебных заведений по специальности 110301
«Механизация сельского хозяйства», 190604 «Техническое обслуживание и ремонт автомобильного транспорта»
ВВЕДЕНИЕ
Дисциплина «Техническая механика» предусматривает изучение общих законов движения и равновесия материальных тел, основ расчета элементов конструкции на прочность, жесткость, усталость и устойчивость, основ проектирования деталей и сборочных единиц.
«Техническая механика» является общепрофессиональной дисциплиной, устанавливающей базовые знания для освоения специальных дисциплин.
В результате изучения дисциплины студент должен иметь представление:
- о роли и месте знаний по дисциплине при освоении специальности «Механизация сельского хозяйства» и в сфере профессиональной деятельности техника по механизации сельскохозяйственного производства;
- об оценке степени совершенства конструкции детали, механизма по критериям работоспособности;
знать:
- законы статики, кинематики и динамики;
- методику расчета элементов конструкций на прочность, жесткость и устойчивость при различных видах деформации;
- методику определения статистических и динамических нагрузок на элементы конструкций, кинематические и динамические характеристики машин и механизмов;
уметь:
- применять при анализе механического состояния тела терминологию технической механики;
- выделять из системы тел рассматриваемое тело и силы, действующие на него;
- определять характер нагружения и нагруженное состояние в точке элемента конструкций;
- проводить несложные расчеты элементов конструкции на прочность и жесткость;
- использовать справочную и нормативную документацию.
ОБЩИЕ МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Учебная дисциплина делится на три части: «Теоретическая механика», «Сопротивление материалов», «Детали машин». Содержание их включается в две контрольные работы. Первая контрольная работа состоит из задач по теоретической механике и теоретической части раздела «Детали машин»; вторая – «Сопротивление материалов» и часть раздела «Детали машин». Такая компоновка заданий произведена для равномерности распределения учебного материала.
Изучение дисциплины делится на два этапа: освоение теории и выполнение контрольных работ.
Последовательность действий студента может быть следующей: знакомство с содержанием задачи; изучение учебного материала по рекомендованным спискам литературы; проверка усвоения – ответы на контрольные вопросы, приведенные в учебнике; разбор приведенных в данном пособии примеров и самостоятельное их выполнение; выполнение контрольной работы.
Вариант задания выбирается по последней и предпоследней цифрам шифра.
Требования к оформлению контрольных работ
1. Контрольная работа выполняется в тетради в клеточку, на обложке которой указывается фамилия, имя, отчество, шифр, наименование дисциплины, номер контрольной работы.
2. Текст выполняется чернилами, схемы карандашом.
3. Решение каждой задачи начинается с новой страницы.
4. После записи решений всех задач указать использованную литературу.
5. Решение задач предваряется записью условия в текстовой форме, а затем в колонку с указанием известных и неизвестных величин.
6. Решение выполняется в последовательности, указанной примером в методических указаниях, действия поясняются текстом.
7. Все вычисления следует производить в единицах системы СИ.
8. В конце тетради оставить несколько страниц для рецензии.
Выполненная работа представляется в учебное заведение перед лабораторно-экзаменационной сессией.
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1. Мовнин М.С. и др. Основы технической механики.- Л.:Машиностроение, 1990.
2. Мовнин М.С. и др. Руководство к решению задач по технической механике.- Л.: Машиностроение, 1977.
3. Аркуша А.И., Фролов М.И. Техническая механика.- М,: Высшая школа, 1983.
4. Аркуша А.И. Руководство к решению задач по теоретической механике.- М.: Высшая школа, 1976.
СОДЕРЖАНИЕ ДИСЦИПЛИНЫ
Введение
СТАТИКА
Тема 1.1. Основные понятия и аксиомы статики
Студент должен:
иметь представление: о силах, равнодействующей и уравновешивающей силах, системах сил; о свободном и связанном телах;
знать: аксиомы статики; основные типы связей и их реакций;
уметь: определять направление реакций связей основных типов.
Литература: Л-1, с.6…12, Л-3, с.6…19.
Практическое занятие.
КИНЕМАТИКА
Тема 1.6. Основные понятия кинематики
Студент должен:
иметь представление: о системах координат; об основных кинематических параметрах движения и связи между ними;
знать: обозначения, единицы измерения кинематических параметров движения.
Литература: Л-1:, с.128…129, Л-3, с.81…85.
Тема 1.7. Кинематика точки
Студент должен:
иметь представление: о естественном и координатном способах задания движения точки; о скоростях средней и истинной; об ускорении при прямолинейном и криволинейном движениях; о равномерном и неравномерном движениях точки;
знать: формулы скорости и ускорения точки (без вывода); формулы (без вывода) и графики равномерного и равнопеременного движения точки;
уметь: определять параметры движения точки.
Литература: Л-1, с.129…136, Л-3, с.85…98.
ДИНАМИКА
Тема 1.9. Основные понятия и аксиомы динамики
Студент должен:
иметь представление: о различии между массой тела и силой тяжести; о связи между силовыми и кинематическими параметрами движения; о двух основных задачах динамики;
знать: обозначения и единицы массы материальной точки; аксиомы динамики.
Литература: Л-1, с.145…147, Л-3, с.123…125.
Тема 2.5. Кручение
Студент должен:
иметь представление: о деформациях при кручении; о внутренних силовых факторах и напряжениях в сечении; о рациональном расположении колес на валу;
знать: формулы для расчета напряжений в точке поперечного сечения (без выводов); закон Гука при сдвиге; условия прочности и жесткости;
уметь: выполнять проектировочный и проверочный расчеты на прочность круглого бруса; проводить проверку на жесткость.
Литература: Л-1, с.80…87, Л-3, с.180…189.
Тема 2.6. Изгиб
Студент должен:
иметь представление: о видах изгиба; о внутренних силовых факторах при прямом поперечном изгибе; о распределении нормальных напряжений по сечению и нейтральной линии; о рациональных формах поперечных сечений балок при изгибе; о касательных напряжениях при изгибе, о линейных и угловых перемещениях;
знать: порядок построения и контроля эпюр поперечных сил и изгибающих моментов; формулы для расчета нормальных напряжений в поперечном сечении при изгибе (без вывода); условия прочности при изгибе;
уметь: выполнять проектировочные и проверочные расчеты на прочность при прямом поперечном изгибе.
Литература: Л-1, с.90…110, Л-3, с.201…231.
РАЗДЕЛ 3. ДЕТАЛИ МАШИН
Тема 3.5. Валы и оси. Муфты
Студент должен:
иметь представление: о значении, классификации и элементах конструкции валов и осей; о материалах валов и осей; о классификации муфт; об устройстве и принципе действия основных типов муфт;
знать: проектировочный и проверочный расчеты валов и осей; назначение муфт;
уметь: составлять расчетную схему, выполнять расчет прямых валов и осей на прочность.
Литература: Л-1, с.242…244; с.256…260, Л-3, с.400…408; с.432…438.
Тема 3.6. Подшипники
Студент должен:
иметь представление: об особенностях рабочего процесса подшипников скольжения и качения; о смазке и КПД; о видах разрушений и критериях работоспособности; о стандартах на подшипники качения; о конструкции подшипниковых узлов;
знать: назначение, конструкцию и материалы подшипников скольжения; классификацию, конструкцию, маркировку подшипников качения; порядок подбора подшипников качения по динамической грузоподъемности.
Литература: Л-1, с.248…256, Л-3, с.408…431.
КОНТРОЛЬНАЯ РАБОТА 1
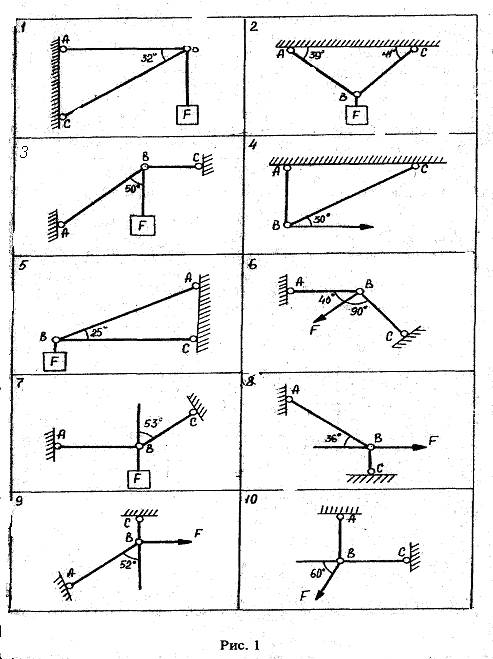
Задание 1.1. Определить недостающие из сил FАВ, FВС, F в механической системе на рис.1 Исходные данные приведены в табл. 1.1.
Таблица 1.1.
| Номер схемы на рис.1
| F,
кН
| FАБ,
кН
| FСВ,
кН
|
|
|
|
|
|
|
|
|
|
|
|
| Вариант
|
|
|
|
|
|
|
|
|
|
|
| 0,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0,4
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0,3
|
|
|
|
|
|
|
|
|
|
|
| 0,6
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0,4
|
|
|
|
|
|
|
|
|
|
|
| 0,7
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0,6
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0,4
|
|
|
|
|
|
|
|
|
|
|
| 0,8
|
|
|
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению задания 1.1.
К решению задачи следует приступать после изучения тем 1.1. «Основные понятия и аксиомы статики» и 1.2. «Система сходящихся сил» (см. «Содержание дисциплины»), уяснения приведенных ниже методических указаний и разбора примеров.
В предлагаемой задаче рассматривается тело (точка), находящееся в равновесии под действием плоской системы сходящихся сил. При аналитическом методе решения применяется система двух уравнений равновесия.
∑Fх=0; ∑Fу=0,
(сумма проекций сил системы на каждую из координатных осей равна нулю).
Проекцией силы на ось называется отрезок оси, заключенный между перпендикулярами, опущенными на ось из начала и конца силы.
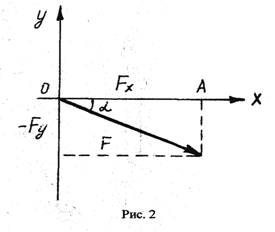
Обозначив проекцию силы F на ось Х через Fх, а на ось У – через Fу, будем иметь (рис.2.):
Fх=Fcosα; Fу=-Fsinα, или Fу=-Fcos(90-α)
α – угол, образованный силой F и осью Х.
Можно упростить решение задач путем рационального выбора направления координатных осей, то есть выбираем ось так, чтобы одна из осей (ось Х или ось У) совпадала с направлением какой-либо неизвестной силы.
Решив задачу аналитическим методом, следует затем проверить правильность решения с помощью графического или геометрического метода.
В международной системе единиц сила измеряется в ньютонах (Н), а также в кратных единицах – килоньютонах (1кН=103Н) и меганьютонах (1МН=106Н).
При решении задача на равновесие плоской системы сходящихся сил рекомендуется придерживаться общей для всех систем схемы:
1. Разделить все детали механизма на три группы – освобождаемое от связей тело, действующие тела и связи. Освобождаемым является тело, движение которого рассматривается в задаче, действующие – тела, вызывающие движение, связи – противодействующие движению освобождаемого тела.
2. Мысленно отбросить действующие тела и связи.
3. Заменить их векторами активных сил и «реакций связей», приложенных к освобожденному телу.
4. Составить уравнения равновесия и найти неизвестные силы. Для этого предварительно векторы сил помещают в поле координатных осей так, чтобы векторы исходили из точки пересечения осей.
5. Проверить правильность решения с помощью графического способа.
Пример 1.1. Определить недостающие из сил:
Реакцию стержня FСВ и силу груза F, если реакция стержня FАВ=6кН.

Рис.3
Решение
1. Механизм (рис.3) состоит из стержней АВ, ВС, соединенных шарниром В, который вертикальной тягой связан с грузом F.
Так как тяга груза F, стержни АВ и СВ связаны с одним телом – шарниром В, то освобождаем от связей шарнир В.
2. Отбрасываем тягу, стержни.
3. Из точки (шарнир В) направляем активную силу тяги F – вертикально вниз, реакцию стержня FСВ – горизонтально влево, реакцию стержня FАВ – под углом 200 к горизонту (как стержень ВС) стрелкой влево – вверх (рис.4а).
3. Из точки (шарнир В) направляем активную силу тяги F – вертикально вниз, реакцию стержня FСВ – горизонтально влево – вверх. (рис.4а).
Направление реакций связей принимается произвольно. Правильность выбранного направления определяется знаком модуля реакции: признаке «-» истинное направление реакции противоположно выбранному.
4. Точку В помещаем в начало осей координат, ось Х проводим совпадающей с вектором FВС, вторую У – перпендикулярно (рис.4а).

Рис.4а,б
Составляет уравнение равновесия
∑FХ=0; -FАВ∙cosα-FСВ=0;
∑Fу=0; FАВ∙sinα-F=0
Решаем уравнения
FСВ=-FАВ∙cosα=-6∙cos200=-6∙0,94=-5,64кН.
F=FАВ∙sinα=6∙sin200=6∙0,34=2,04кН.
Данная система находится в состоянии равновесия, если соотношение параметров (сил) будет таково: F=2,04кН, FАВ=6кН, FСВ=5,64кН.
Сила FСВ должна действовать в противоположном от заданного направления, так как ее значение получилось отрицательным.
5. Для проверки правильности решения применяем графический метод, в выбранном масштабе М 1кН:1см, строим замкнутый силовой треугольник (рис.4б).
Следует отметить, что векторный треугольник показывает действительное, а не предполагаемое направление искомых сил.
Задание 1.2
Определить реакции опор двухопорной балки. Данные взять из табл. 1.2. рис.5
Таблица 1.2.
| Вариант
| № схемы на рис.5
|
q
H |м
|
F,Н
|
М,
Н∙м
| Вариант
| № схемы на рис. 5
|
q
Н/ м
|
F. Н
|
М,
Н м
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 4,5
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1,5
|
|
|
|
| 2,5
|
|
|
|
|
|
|
| 3,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 4,5
|
|
|
| 1,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 4,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 3,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 4,5
|
|
|
| 3,5
|
|
|
|
|
|
|
|
| 0,5
|
|
|
|
| 1,5
|
|
|
|
|
|
|
|
| 2,5
|
|
|
|
|
|
|
|
|
|
|
|
| 4,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 5,5
|
|
|
| 8,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 6,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1,5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к решению задания 1.2
К решению этих задач следует приступать после изучения тем «Пара сил и момент силы», «Система сил, произвольно расположенных в плоскости (см. «Содержание дисциплины).
Пара сил. Две равные параллельные силы, направленные в противоположные стороны и не лежащие на одной прямой, называются парой сил или просто парой (рис. 6а). Кратчайшие расстояния между линиями действия сил, составляющих пару, называются плечом пары (рис.6б).
Произведение одной из сил пары на плечо называется моментом пары и обозначается буквой М; М=±F∙r.
Момент пары сил будем считать положительным, если пара стремится повернуть тело по часовой стрелке и отрицательным, если против часовой стрелки (рис.6). Размерность пары (Н∙м, кН∙м). Чтобы задать пару, достаточно задать ее момент, поэтому иногда слово «пара» заменяют словом «момент» и условно изображают его так, как показано на рис.6в.

Момент силы относительно точки. В некоторых механизмах выявить пару сил затруднительно, поэтому вращательное действие определяют с помощью момента силы относительно точки (центра) вращения. Момент силы относительно точки определяется как произведение вращающей силы на плечо. Плечом называют расстояние – перпендикуляр от точки – центра вращения до вектора вращающей силы.
При определении момента силы F1 относительно точки 0, надо умножить вращающую силу F1, на плечо – перпендикуляр r1 (рис.7), то есть с учетом направления вращения М  =-F1∙r1.
=-F1∙r1.

При определении момента силы F2, приложенной к рычагу АВ под углом α, следует взять произведение вращающей части силы F2∙cosα на плечо r2 (перпендикуляр к вращающей F2∙cosα) или произведение силы F на плечо r∙cosα- перпендикуляр к вектору вращающей силы F, т.е.
М  =+F2∙cosα∙r или М =+F∙r∙сosα/
=+F2∙cosα∙r или М =+F∙r∙сosα/
Очевидно, что для вращающихся тел-рычагов должно соблюдаться правило: рычаг в равновесии, если момент силы, поворачивающей по часовой стрелке, равен моменту силы, поворачивающей против часовой стрелки.
↓М  ↓
↓
или М  , т.е. ∑М
, т.е. ∑М  =0.
=0.
Для данного случая (рис.7) F1∙r2-F2∙cosα∙r=0
Решение
Пользуясь методом освобождения от связей:
1. Разделяем изображенную двухопорную балку на освобожденное тело, тела, вызывающие ее движение, и тела, противодействующие движению.
Освобожденным телом будем считать балку АВ, действующими – неопределенные тела с силами F, q, М, противодействующими – опоры А и В.
2. Отбрасываем связи: опоры А и В.
3. Заменяем их реакциями. Действующие, уже замененные силами, преобразуем:
а) раскладываем F на горизонтальную и вертикальную составляющие
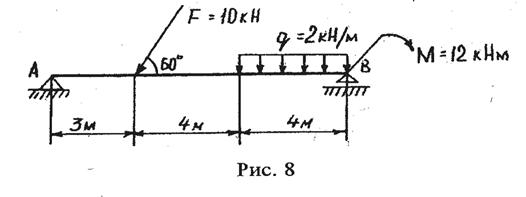
Fх=F∙cos600 и Fу=F∙cos300 (рис.9)
б) равномерно распределенную (погонную) нагрузку q заменяем сосредоточенной Q Q=q∙ℓ
Cила Q, очевидно, будет действовать вертикально вниз на расстоянии ВD, равном 2м (половина от 4м).
Противодействующие опоры А и В заменяем реакциями:
а) опора А – Rуа и Rха
б) опора В и Rуа (рис.9)
Пример 1.2. Определить реакцию опор двухопорной балки, нагруженной силами (рис.8)

Опора А ограничивает движение в двух взаимно перпендикулярных направлениях (Х и У). Ее реакции RуА, RхА.
Опора В – в одном (У) – реакция RВ.
4. Пользуясь уравнениями равновесия рычага относительно точек – центров вращения (опора А и В), получим
∑МА=0.
RВ∙АВ-М-Q∙АD-F∙cos300∙АС=0
RВ=  ∑МВ=0
∑МВ=0
Rуа∙АВ-F∙cos300∙CВ-Q∙DВ+М=0
Rуа= 
Проверяем правильность определения вертикальных реакций по условию
∑Fу=0 (см.рис.9).
Rуа-F∙cos300-Q+RВ=0.
6,62-10∙0,86-8+9,98=0
0=0
Определяем горизонтальную реакцию Rха опоры А по уравнению
∑FХ=0
Rха-F∙cos600=0
Rха=F∙cos600=10∙0,5=5кН.
Задание 1.3. Определить движущую силу и развиваемую автомобилем мощность, если масса автомобиля m1, коэффициент трения f, кпд η; время t, начальная скорость υ1, конечная υ2.
Таблица 1.3.1.
| Маневр
| V1
м/с
| V2
м/с
| t,
с
| f
| η
| m,
кг
|
| разгон
| торможе
ние
| поворот
|
| Варианты
|
|
|
|
|
|
|
| 0,4
| 0,95
|
|
|
|
|
|
|
|
| 0,5
| 0,94
|
|
|
|
|
|
|
|
| 0,4
| 0,94
|
|
|
|
|
|
|
|
| 0,5
| 0,90
|
|
|
|
|
|
|
|
| 0,4
| 0,91
|
|
|
|
|
|
|
|
| 0,6
| 0,92
|
|
|
|
|
|
|
|
| 0,3
| 0,93
|
|
|
|
|
|
|
|
| 0,2
| 0,95
|
|
|
|
|
|
|
|
| 0,4
| 0,96
|
|
|
|
|
|
|
|
| 0,5
| 0,95
|
|
| | | | | | | | | | |
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к решению задания 1.3.
К выполнению этого задания студент может приступить после изучения тем 1.9. «Основные понятия и аксиомы динамики», 1.10. «Метод кинетостатики», 1.11. «Трение. Мощность».
Движение трактора определяется параметрами движения: скоростью, ускорением; параметрами действия – силами: движущей Fдв, сопротивления качению Fк, сопротивления прицепа Fп, сопротивления тяжести на подъеме Fi, собственному сопротивлению – силе инерции Fи.
Приняв трактор за точку Т, изобразим векторы сил (рис.10а).
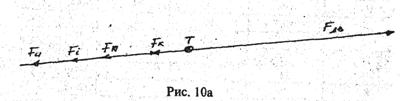
Соотношение между силами определяется уравнением равновесия сил:
∑F=0, то есть Fдв-Fк-Fп±Fi±Fи=0.
Силы Fi, Fи, Fп могут быть со знаком «+», если они помогают Fдв (направлены с ней), или со знаком «-», если они противодействуют Fдв.
Потребная движущая сила находится из уравнения равновесия сил после определения остальных по формулам:
Сила сопротивления качению на горизонтальном участке при
Fк=fк∙Gт,
где fк – коэффициент сопротивления качению, зависящий от фона (основания, по которому движется трактор), его состояния (табл.1.3.2.), состояния колес.
Gт – вес (сила тяжести) трактора, Н.
Сила сопротивления прицепа (крюковая сила)
Fп=fк∙Gп,
здесь Gп – вес прицепа, Н.
Если прицепом является с.-х. орудие, типа плуг, культиватор, то его сопротивление определяется иначе, по формулам дисциплины «Сельскохозяйственные машины».
Сила тяжести на склоне Fi=±i∙G,
где I – синус угла наклона дороги.
Сила тяжести на склоне положительна при спуске (+i) и отрицательна при подъеме (-i).
Сила инерции прямолинейного движения Fи=±m∙а,
где m – масса трактора, прицепа; m=  ,
,
q=9,8 – ускорение свободного падения, м/с2.
Ускорение положительно (+а) при разгоне трактора и отрицательно (-а) при торможении.
Решение задачи состоит из этапов:
1. Построение линии векторов сил с учетом знаков уклона I и ускорения а.
2. Запись уравнения равновесия в соответствии со знаками сил Fi и Fи.
3. Подстановка вместо сил Fк, Fп и т.д. их выражений.
4. Выражение неизвестной Fдв из полученной формы уравнения.
5. Постановка численных значений в соответствии с табл. 1.3.1 и 1.3.2.

Пример 3. Определить движущую силу и развиваемую автомобилем мощность, если масса автомобиля m, начальная скорость υ1, конечная скорость υ2, время t, коэффициент трения f, кпд η
m=2000кг
υ1=0 Решение
υ2=16 м/с 1. Выполним расчетную схему сил, для чего:
t=4с 1.1. Автомобиль примем за материальную точку.
f=0,2 1.2. Приложим к нему активные силы – движущие
η=0,8 силу  и силу тяжести
и силу тяжести  ;
;
 Fдв-?Р-? 1.3. приложим реактивные силы – силу трения
Fдв-?Р-? 1.3. приложим реактивные силы – силу трения
 и нормальную реакцию плоскости
и нормальную реакцию плоскости  .
.
2. Показав направление ускорения  , условно приложим силу инерции
, условно приложим силу инерции  .
.

3. Уравнение по принципу Даламбера в векторной форме:
∑ 
4. Выбрав оси координат спроектируем на 0х и 0у:
0х: Fдв-Fтр-Fин=0,
0у: Rп-G=0
6. Решим их относительно неизвестных.
Сила тяжести G=mq=2000∙9,81=19620Н
Нормальная реакция плоскости Rп=G=19620Н.
Из основного закона трения сила трения Fтр=f∙Rп=0,2∙19620=3924Н.
Сила инерции Fин=m∙а;
ускорение а=  Fин=2000∙4=8000Н.
Fин=2000∙4=8000Н.
Движущая сила Fдв=Fтр+Fин=3924+8000=11924Н.
6. Мощность на передвижение: Р=Fдв∙υ=11924∙16=190784Вт=190,784кВт.
С учетом КПД Рполн= 
Задание 1.4. Определить параметры привода: угловые скорости, вращающие моменты, мощности на валах, передаточные отношения, КПД. Описать назначение, принцип работы, устройство привода. Данные взять из таблицы 1.4.
Таблица 1,4
| № варианта
| № схемы по рис. 11
| Мощность эл. дв.Р1, кВт
| Частота вращ.. электродв. n об/мин
| Перед. число ред..uр
| № варианта
| № схемы по рис. 11
| Мощность эл. дв. Р1,
кВт
| Частота вращ.электродв. n, об/ мин
| Перед. число. ред. uр
|
|
|
| 8,5
|
| 2,0
|
|
| 3,0
|
| 1,6
|
|
|
| 3,2
|
| 3,15
|
|
| 7,2
|
| 1,25
|
|
|
| 4,0
|
| 2,5
|
|
| 8,3
|
|
|
|
|
| 3,5
|
| 3,15
|
|
| 9,6
|
| 2,5
|
|
|
| 3,6
|
|
|
|
| 2,2
|
|
|
|
|
| 1,9
|
| 12,5
|
|
| 3,5
|
|
|
|
|
| 2,8
|
|
|
|
| 3,8
|
|
|
|
|
| 2,6
|
|
|
|
| 8,0
|
|
|
|
|
| 3,3
|
| 3,15
|
|
| 5,1
|
| 2,5
|
|
|
| 3,0
|
|
|
|
| 3,0
|
|
|
|
|
| 4,7
|
|
|
|
| 4,6
| 95,5
| 1,25
|
|
|
| 3,6
|
|
|
|
| 6,9
|
| 2,5
|
|
|
| 2,0
|
|
|
|
| 5,3
|
| 3,15
|
|
|
| 6,4
|
| 1,6
|
|
| 4,7
|
|
|
|
|
| 8,5
|
|
|
|
| 8,9
|
|
|
|
|
| 9,8
|
| 1,25
|
|
| 3,2
|
|
|
|
|
| 4,4
|
| 1,6
|
|
| 5,6
|
| 2,5
|
|
|
| 8,6
|
|
|
|
| 6,1
|
|
|
|
|
| 3,7
|
|
|
|
| 7,6
|
|
|
|
|
| 3,2
|
| 2,5
|
|
| 8,8
|
| 2,8
|
|
|
| 2,6
|
| 1,25
|
|
| 6,6
|
| 3,15
|
|
|
| 2,1
|
|
|
|
| 5,0
|
|
|
|
|
| 2,9
|
| 1,6
|
|
| 4,5
|
|
|
|
|
| 2,4
|
| 3,15
|
|
| 2,6
|
| 1,6
|
|
|
| 5,5
|
|
|
|
| 2,8
|
| 2,4
|
|
|
| 4,2
|
| 2,5
|
|
| 4,6
|
|
|
|
|
| 3,8
|
|
|
|
| 4,0
|
| 3,15
|
|
|
| 3,2
|
| 31,5
|
|
| 2,3
|
|
|
|
|
| 4,6
|
|
|
|
| 4,8
|
| 2,5
|
|
|
| 6,2
|
|
|
|
| 3.5
|
|
|
|
|
| 5,6
|
| 1,6
|
|
| 2,4
|
| 3,15
|
|
|
| 4,6
|
|
|
|
| 8,5
|
|
|
|
|
| 2,6
|
| 2,5
|
|
| 8.0
|
|
|
|
|
| 2,7
|
| 3,15
|
|
| 3,4
|
| 2,5
|
|
|
| 3,2
|
| 1,25
|
|
| 4,9
|
|
|
|
|
| 4,8
|
| 2,0
|
|
| 3,9
|
|
|
|
|
| 2,8
|
| 2,8
|
|
| 2,5
|
|
|
|
|
| 2,5
|
|
|
|
| 6,0
|
| 2,5
|
|
|
| 2,8
|
| 3,15
|
|
| 3,6
|
|
|
|
|
| 4,4
|
|
|
|
| 5,4
|
|
|
|
|
| 5,8
|
| 1,25
|
|
| 3,3
|
|
|
|
|
| 6,3
|
| 1,6
|
|
| 4,5
|
| 3,15
|
|
|
| 2,0
|
| 2,5
|
|
| 4.4
|
| 2,5
|
|
|
| 5,0
|
|
|
|
| 3.6
|
| 3,15
|
|
|
| 3,4
|
|
|
|
| 3.4
|
|
|
|
|
| 2,8
|
|
|
|
| 3.0
|
| 2,5
|
|
|
| 4,9
|
|
|
|
| 4.0
|
|
|
|
|
| 3,5
|
| 2,8
|
|
| 8.4
|
|
|
|
|
| 5,6
|
| 2,5
|
|
| 3.9
|
| 2,4
|
|
|
| 3,7
|
| 3,15
|
|
| 2,4
|
| 2,8
|

МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к решению задания 1.4.
Механические передачи чаще всего передают вращательное движение, изменяют направление, частоту, плоскость вращения, вращающий момент.
Частота вращения измеряется в об/мин (n) и в радианах/с (ω). Во втором случае ее еще называют угловой скоростью. Между ними существует следующая зависимость:
ω= 
Имеется ввиду, что в одном обороте 2π=6,28 радиан, а в одной минуте 60 секунд.
Изменение частоты вращения выражают через передаточное отношение u12.
u12=± 
|
|
|







