Мгновенный центр ускорений (МЦУ). Способы нахождения.
При определении скоростей точек плоской фигуры было установлено, что в каждый момент времени существует такая точка Р фигуры (МЦС), скорость которой равна нулю. Покажем, что в каждый момент времени существует точка фигуры, ускорение которой равно нулю. Такая точка называется мгновенным центром ускорений (МЦУ). Обозначим ее через Q.
Рассмотрим плоскую фигуру, совершающую движение в плоскости рисунка (рис.). Примем за полюс какую-либо точку А, модуль и направление ускорения аА которой известны в рассматриваемый момент времени. Пусть в этот момент времени известны угловая скорость и угловое ускорение фигуры. Из формулы  следует, что точка Q будет МЦУ, если
следует, что точка Q будет МЦУ, если  , т. е. когда
, т. е. когда  . Так как вектор aQA составляет с линией AQ угол "альфа"
. Так как вектор aQA составляет с линией AQ угол "альфа"  , то параллельный ему вектор аА направлен к линии, соединяющей полюс А с точкой Q, также под углом "альфа" (см. рис.).
, то параллельный ему вектор аА направлен к линии, соединяющей полюс А с точкой Q, также под углом "альфа" (см. рис.).

Проведем через полюс А прямую MN, составляющую с вектором его ускорения угол "альфа", откладываемый от вектора аА в направлении дуговой стрелки углового ускорения. Тогда на луче AN найдется точка Q, для которой . Поскольку, согласно  ,
,  , точка Q (МЦУ) будет отстоять от полюса А на расстоянии
, точка Q (МЦУ) будет отстоять от полюса А на расстоянии  .
.
Таким образом, в каждый момент движения плоской фигуры, если угловая скорость и угловое ускорение не равны нулю одновременно, имеется единственная точка этой фигуры, ускорение которой равно нулю. В каждый последующий момент времени МЦУ плоской фигуры будет находиться в различных ее точках.
Если МЦУ — точку Q выбрать за полюс, то ускорение любой точки А плоской фигуры
 , так как aQ = 0. Тогда
, так как aQ = 0. Тогда  . Ускорение аА составляет с отрезком QA, соединяющим эту точку с МЦУ, угол "альфа", откладываемый от QA в сторону, противоположную направлению дуговой стрелки углового ускорения. Ускорения точек фигуры при плоском движении пропорциональны расстояниям от МЦУ до этих точек.
. Ускорение аА составляет с отрезком QA, соединяющим эту точку с МЦУ, угол "альфа", откладываемый от QA в сторону, противоположную направлению дуговой стрелки углового ускорения. Ускорения точек фигуры при плоском движении пропорциональны расстояниям от МЦУ до этих точек.
Таким образом, ускорение всякой точки фигуры при ее плоском движении определяется в данный момент времени так же, как и при вращательном движении фигуры вокруг МЦУ.
Рассмотрим случаи, когда положение МЦУ можно определить с помощью геометрических построений.
Дифференциальные уравнения движения материальной точки в декартовых прямоугольных координатах. Две основные задачи для материальной точки


Рис.10
Составим основное уравнение динамики для точки  , где абсолютное ускорение
, где абсолютное ускорение  . Поэтому уравнение будет таким
. Поэтому уравнение будет таким  или
или  .
.
Но  - переносная сила инерции,
- переносная сила инерции,  - кориолисова сила инерции. Поэтому основное уравнение динамики для относительного движения запишем так
- кориолисова сила инерции. Поэтому основное уравнение динамики для относительного движения запишем так
 . (7)
. (7)
Спроектировав это векторное равенство на подвижные оси x 1, y 1, z 1, имея в виду, что проекции вектора ускорения на оси – есть вторые производные от соответствующих координат по времени, получим дифференциальные уравнения относительного движения
 (8)
(8)
Сравнивая эти уравнения с дифференциальными уравнениями абсолютного движения, замечаем, что относительное движение материальной точки определяется такими же методами, что и абсолютное, надо лишь кроме обычных сил учесть переносную силу инерции и кориолисову силу инерции.
Если переносное движение поступательное, равномерное и прямолинейное, т.е. подвижная система инерциальная, то ускорение  и
и  . Значит
. Значит  и дифференциальное уравнение (8) будет точно совпадать с дифференциальным уравнением абсолютного движения. Следовательно, движение точки во всех инерциальных системах описывается аналогичными законами (отличаются только постоянными интегрирования, зависящими от начальных условий).
и дифференциальное уравнение (8) будет точно совпадать с дифференциальным уравнением абсолютного движения. Следовательно, движение точки во всех инерциальных системах описывается аналогичными законами (отличаются только постоянными интегрирования, зависящими от начальных условий).
Поэтому невозможно установить, наблюдая за движением точки, движется система поступательно, равномерно и прямолинейно или находится в покое. Этот вывод впервые был сделан Г.Галилеем и называется его именем – принцип относительности Галилея.
Теорема Кориолиса[править | править исходный текст]
Пусть точка совершает сложное движение: движется относительно неинерциальной системы отсчёта  со скоростью
со скоростью  ; система при этом сама движется относительно инерциальной системы координат
; система при этом сама движется относительно инерциальной системы координат  , причём линейная скорость движущегося вместе с ней полюса
, причём линейная скорость движущегося вместе с ней полюса  равна
равна  , а угловая скорость системы равна
, а угловая скорость системы равна  .
.
Тогда абсолютная скорость рассматриваемой точки (то есть её линейная скорость в инерциальной системе координат) будет такой:
 , причём
, причём  ,
,
где  — радиус-вектор точки относительно полюса . Первые два слагаемых в правой части равенства представляют собой переносную скорость точки, а последнее — её относительную скорость.
— радиус-вектор точки относительно полюса . Первые два слагаемых в правой части равенства представляют собой переносную скорость точки, а последнее — её относительную скорость.
Продифференцируем это равенство по времени:

Найдём значение каждого слагаемого в инерциальной системе координат:



где  — линейное ускорение точки относительно системы ,
— линейное ускорение точки относительно системы ,  — угловое ускорение системы .
— угловое ускорение системы .
Таким образом, имеем:

Полученное равенство служит математическим выражением теоремы Кориолиса: Абсолютное ускорение точки в сложном движении равно геометрической сумме её переносного ускорения (сумма первых трёх слагаемых в правой части), относительного ускорения (четвёртое слагаемое) и добавочного кориолисова ускорения (последнее слагаемое), равного  .
.
Используя обозначения  и
и  , получим запись теоремы Кориолиса в более сжатом виде:
, получим запись теоремы Кориолиса в более сжатом виде:

Причиной возникновения кориолисова ускорения является взаимное влияние друг на друга переносного и относительного движений.
Сам Кориолис выражал в 1835 г. свои результаты в иной форме, вводя в рассмотрение переносную и кориолисову силы инерции; общепринятая же ныне чисто кинематическая формулировка теоремы Кориолиса предложена в 1862 г. Анри Эме Резалем[7].
Заметим, что если система также является неинерциальной и движется относительно другой системы, а та другая относительно следующей и т. д., то величины  ,
,  для системы в последнем уравнении следует считать полными — то есть как сумму собственных ускорений (скоростей) всех систем координат (каждой относительно предыдущей), начиная с первой подвижной системы, а
для системы в последнем уравнении следует считать полными — то есть как сумму собственных ускорений (скоростей) всех систем координат (каждой относительно предыдущей), начиная с первой подвижной системы, а  — абсолютным ускорением поступательного движения относительно неподвижной инерциальной системы координат.
— абсолютным ускорением поступательного движения относительно неподвижной инерциальной системы координат.
Заметим также, что в частности, чтобы точка относительно неинерциальной системы отсчёта двигалась прямолинейно по радиусу к оси вращения (см. рис.), необходимо приложить к ней силу, которая будет противодействующей суммы Кориолисовой силы  , переносной вращательной силы
, переносной вращательной силы  и переносной силы инерции поступательного движения системы отсчёта
и переносной силы инерции поступательного движения системы отсчёта  . Составляющая же ускорения
. Составляющая же ускорения  не отклонит тело от этой прямой, так как является осестремительным переносным ускорением и всегда направлена по этой прямой. Действительно, если рассматривать уравнение такого движения, то после компенсации в нём вышеупомянутых сил получится уравнение
не отклонит тело от этой прямой, так как является осестремительным переносным ускорением и всегда направлена по этой прямой. Действительно, если рассматривать уравнение такого движения, то после компенсации в нём вышеупомянутых сил получится уравнение  , которое если умножить векторно на , то с учетом
, которое если умножить векторно на , то с учетом  получим относительно дифференциальное уравнение
получим относительно дифференциальное уравнение  , имеющее при любых и общим решением
, имеющее при любых и общим решением  , которое и является уравнением такой прямой —
, которое и является уравнением такой прямой —  .
.


38. Механическая система. Масса системы. Центр масс системы и его координаты. Дифференциальные уравнения движения механической системы. Теорема о движении центра масс системы.







39. Классификация сил, действующих на механическую систему: силы внешние и внутренние. 

40 Моменты инерции твердого тела относительно оси и полюса. Радиус инерции. Теорема о моментах инерции относительно параллельных осей. Осевые моменты инерции некоторых однородных тел.

Момент инерции фигуры относительно координатной оси может быть представлен в виде произведения площади фигуры на квадрат радиуса инерции:

Ввели в рассмотрение еще две геометрические характеристики: радиусы инерции поперечного сечения относительно осей x и y, соответственно. Формула радиуса инерции имеет вид:

Главным центральным осям инерции соответствуют главные радиусы инерции:

Для прямоугольника (см. рис. 4.4, а) главные радиусы инерции равны:

Для круглого сечения формула главных радиусов инерции имеет вид:






На том же перемещении.
Доказывается теорема, естественно, аналогично остальным. То есть записывается теорема об изменении кинетической энергии каждой из точек системы под действием внешних и внутренних сил, а затем все уравнения складываются.

Это возможно, если в системе тел имеются упругие элементы. Например, колебания на гладкой горизонтальной поверхности двух соединенных между собой пружиной шариков. Это может быть и в том случае, если между деталями рассматриваемых механизмов существует внутреннее трение.
Необходимо отметить, что при решении учебных задач системы с упругими элементами практически не встречаются, а внутренним трением в шарнирах, соединяющих детали механизмов, авторы задач, как правило, советуют пренебречь. Поэтому при решении типовых задач рассматриваемую теорему автор рекомендует записывать и формулировать для себя несколько короче:

*** В параграфе, посвященном определению работы различных сил, доказывается, что работа внутренних сил, приложенных к точкам твердых тел, на любых их перемещениях равна нулю.
При решении задач обычно используется интегральная форма теоремы. С ее помощью определяется изменение скоростей точек системы на некотором перемещении под действием известных сил. Но возможно и решение иных задач. В некоторых случаях по определенному опытным путем изменению скорости тела или системы тел судят о работе сил сопротивления среды или каких-то других сил.
В дифференциальной форме теорему обычно применяют для определения ускорений точек системы в рассматриваемом положении.

О решении задач с помощью рассматриваемой теоремы и остальных общих теорем динамики для механических систем речь пойдет отдельно. Закончим же теорему об изменении кинетической энергии М.С. формулировкой следующего закона сохранения.
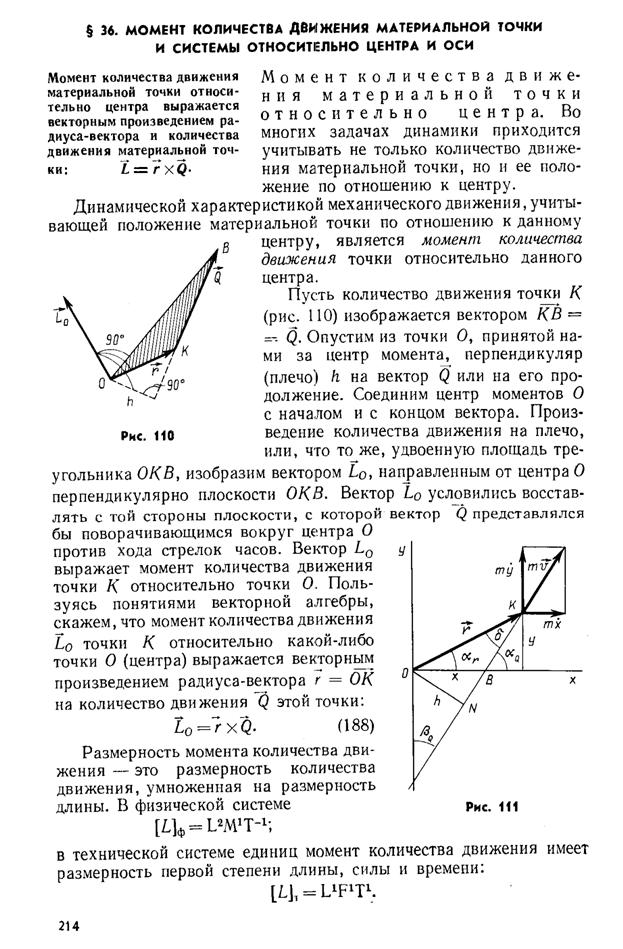
42. Момент количества движения точки относительно центра и оси. Главный момент количеств движения. Теорема об изменении момента количества движении точки.


Мгновенный центр ускорений (МЦУ). Способы нахождения.
При определении скоростей точек плоской фигуры было установлено, что в каждый момент времени существует такая точка Р фигуры (МЦС), скорость которой равна нулю. Покажем, что в каждый момент времени существует точка фигуры, ускорение которой равно нулю. Такая точка называется мгновенным центром ускорений (МЦУ). Обозначим ее через Q.
Рассмотрим плоскую фигуру, совершающую движение в плоскости рисунка (рис.). Примем за полюс какую-либо точку А, модуль и направление ускорения аА которой известны в рассматриваемый момент времени. Пусть в этот момент времени известны угловая скорость и угловое ускорение фигуры. Из формулы следует, что точка Q будет МЦУ, если , т. е. когда . Так как вектор aQA составляет с линией AQ угол "альфа" , то параллельный ему вектор аА направлен к линии, соединяющей полюс А с точкой Q, также под углом "альфа" (см. рис.).
Проведем через полюс А прямую MN, составляющую с вектором его ускорения угол "альфа", откладываемый от вектора аА в направлении дуговой стрелки углового ускорения. Тогда на луче AN найдется точка Q, для которой . Поскольку, согласно , , точка Q (МЦУ) будет отстоять от полюса А на расстоянии .
Таким образом, в каждый момент движения плоской фигуры, если угловая скорость и угловое ускорение не равны нулю одновременно, имеется единственная точка этой фигуры, ускорение которой равно нулю. В каждый последующий момент времени МЦУ плоской фигуры будет находиться в различных ее точках.
Если МЦУ — точку Q выбрать за полюс, то ускорение любой точки А плоской фигуры
, так как aQ = 0. Тогда . Ускорение аА составляет с отрезком QA, соединяющим эту точку с МЦУ, угол "альфа", откладываемый от QA в сторону, противоположную направлению дуговой стрелки углового ускорения. Ускорения точек фигуры при плоском движении пропорциональны расстояниям от МЦУ до этих точек.
Таким образом, ускорение всякой точки фигуры при ее плоском движении определяется в данный момент времени так же, как и при вращательном движении фигуры вокруг МЦУ.
Рассмотрим случаи, когда положение МЦУ можно определить с помощью геометрических построений.





