Введение.
В настоящее время происходит непрерывный процесс совершенствования авиационного оборудования летательных аппаратов в соответствии с постоянно усложняющимися задачами, решаемыми современными авиационными комплексами. Приборное оборудование является важной составной частью бортового авиационного оборудования летательного аппарата. Оно выполняет задачу получения информации о параметрах, характеризующих пространственное положение и движение летательного аппарата в воздушной среде, работу авиационных двигателей и других систем.
Научно-технический прогресс в воздушном транспорте, предъявляющий высокие требования по точности, надёжности, регулярности и безопасности полётов, приводит к большему оснащению летательных аппаратов различными информационно-измерительными приборами.
В этой работе мы предложим метод построения, идентификации, подгонки и проверки моделей временных рядов. Этот метод будет удобен для дискретных систем с выборкой данных, т. е. таких систем, в которых возможность произвести наблюдение и предпринять регулирующие действия возникает через равные интервалы времени.Мы продемонстрируем использование этих моделей временных рядов.
Прогнозирование будущих значений временного ряда по его текущим и прошлым значениям:
Использование доступных к моменту времени t наблюдений временного ряда для прогнозирования его значения в некоторый момент времени в будущем t + I может явиться основой для а) планирования в экономике и торговле; б) планирования выпуска продукции; в) складского контроля и контроля выпуска; г) управления и оптимизации промышленных процессов. Существует необходимость в прогнозе вперед на интервал, называемый временем упреждения и зависящий от конкретной проблемы.
Цель работы.
В данной работе перед нами стоят задачи:
-провести моделирование стационарного случайного процесса с заданной корреляционной функции в пространстве состояний;
-произвести анализ корреляционной функции и спектрального представления сигнала при изменении его параметров;
-исследовать методы авторегрессии первого и второго порядка, скользящего среднего первого и второго порядка и смешанную модель первого порядка;
-сравнить модели по критерию минимума среднего квадрата ошибки по коэффициенту корреляции для первой компоненты на основе модели в пространстве состояний с моделями авторегрессии 1го и 2го порядка, скользящим средним 1го и 2го порядка и смешанной моделью 1го порядка;
-разработать и исследовать алгоритм оптимальной временной финитной оценки сигналов на основе выбранной модели и провести ее сравнение по точности оценки фильтром Калмана по критерию минимума среднего квадрата ошибки оценки;
-разработать алгоритм прогнозирования сигналов на основе выбранной модели и провести ее анализ.
Исходные данные.
Стационарный случайный процесс.
Корреляционная функция данного случайного процесса [1]:
 (1)
(1)
Дисперсия:
D = σ2 = 1
Начальные значения:
α = 0.01 1/с;
β = 0.01 1/с;
Моделирование случайного процесса.
Параметры моделирования.
Нахождение спектра.
Спектр находится по следующей формуле:
 (2)
(2)
где:K(τ) – заданная корреляционная функция.
В результате подстановки формулы (1) в формулу (2), получим выражение для спектра данного процесса:
 (3)
(3)
Характеристики процесса
- Математическое ожидание процесса.
Мат. ожидание находится по следующей формуле:
 (5)
(5)
- Дисперсия процесса.
Дисперсия процесса определяется по следующей формуле:
 (6)
(6)
Нормировка.
Проведем нормировку полученного ранее процесса Z1:
 (8)
(8)
Найдем мат. ожидание нормированного процесса Z1norm:
 (9)
(9)
 - рассчитанное вручную мат. ожидание.
- рассчитанное вручную мат. ожидание.
- встроенная функция расчета мат. ожидания.
Вывод: исходя из того, что рассчитанное вручную и рассчитанное встроенными методами Mathcadмат. ожидания совпадают, можно утверждать о правильности выполнения нормировки.
 (10)
(10)
Dnorm = 1 - рассчитанная вручную дисперсия.
 - встроенная функция расчета дисперсии.
- встроенная функция расчета дисперсии.
Вывод: исходя из того, что рассчитанная вручную и рассчитанная встроенными методами Mathcadдисперсия совпадают, можно утверждать о правильности выполнения нормировки.
Построим график:

Рис. 9 График нормированного и обычного процессов.
Вывод: исходя из того, что графики близки друг к другу, можно утверждать о правильности выполнения нормировки.
Корреляционная функция.
Начальное значение плотности распределения находится по формуле:
 (11)
(11)
Расчет плотности распределения:

По полученным выражениям построим графики:

Рис. 10. График зависимости статистической (r(t)) и теоретической K(t) корреляционных функций от времени.
Вывод: по графику видно, чтотеоретическая и статистическая корреляционные функции по своему характеру довольно близки. Особенно это важно для начальных моментов времени, значения на которых будут использоваться для построения моделей процессов.
Для производной корреляционные функции имеют вид, представленный на рисунке 11.
Рис.11. График зависимости статистической (r2(t)) и теоретической dK(t) корреляционных функцийпроизводной процесса от времени.
Вывод: согласно графику, статистическая корреляционная функция неточно описывает заданную теоретическую, поэтому далее она не берется на рассмотрение.
Выбор модели
По каждой из моделей сигналов найдем отклонение от истинной модели в пространстве состояний:
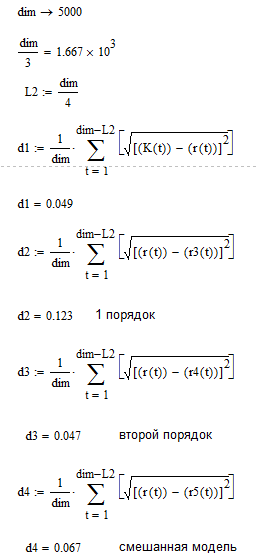
Вывод: по результатам расчета ошибки моделей процессов наименьший средний квадрат ошибки по коэффициенту корреляции модели процесса авторегрессии 2-го порядка. Следовательно, в дальнейших расчетах именно эта модель будет использоваться как наиболее близкая к процессу в пространстве состояний, а, значит, и к реальному процессу.
Прогноз.
Расчет квантиля
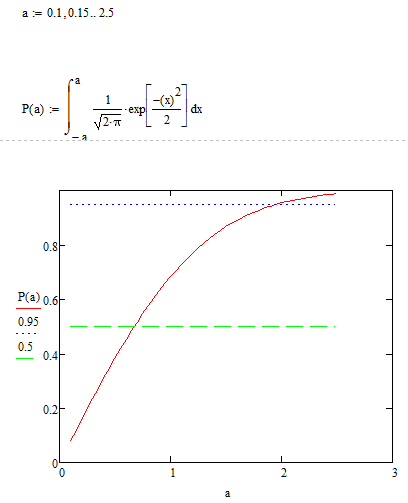
Рис.25. График зависимости вероятности от квантиля
Алгоритмы расчета прогноза в обе стороны с 80 по 100 отсчет:
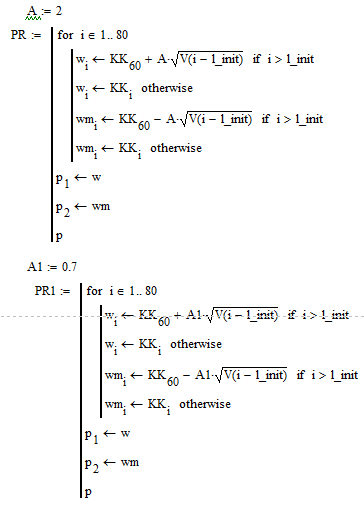
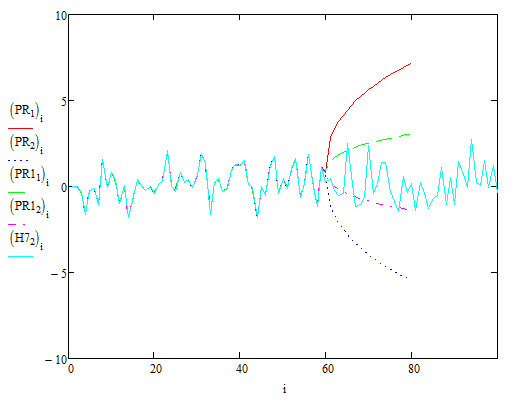
Рис.26.График зависимости смешанного процесса, прогнозов на 0,95 (PR1) и прогнозов на 0,5 (PR2) в обе стороны от количества отсчетов.
8.1 Прогнозирование смешанного процесса 1-ого порядка:
Прогнозы рассчитываются по 5.4.18 [1]:
zt(1) = E1zt – E2at
zt(l) = f1z(l - 1)

Рис.27. График зависимости прогноза 60-го отсчета (КК) на 20 отсчетов вперед.
Выводы
При проведении данной работы былопроведено моделирование стационарного случайного процесса с заданной корреляционной функцией в пространстве состояний.
В разделе исследования корреляционной функции и спектра исходного процесса было определено следующее:
1)При увеличении α корреляционная функция сжимается, а при уменьшении, наоборот, расширяется. При α стремящемся к ∞ корреляционная функция стремится к дельта-функции, а смоделированный процесс – к дискретному белому шуму. При увеличении α график спектральной плотности расширяется, при этом высота точки экстремума уменьшается. При уменьшении α график спектральной плотности сжимается, при этом высота точки экстремума увеличивается.
2)При увеличении параметра β частота колебаний корреляционной функции увеличивается. При увеличении β график спектральной плотности расширяется, при этом высота точки экстремума уменьшается. При уменьшении β график спектральной плотности сжимается, при этом высота точки экстремума увеличивается.
3)При увеличении σ высота корреляционной функции и площадь под графиком спектральной плотности увеличивается.
Моделирование в пространстве состояний: определена частотная характеристика формирующего фильтра, построены графики случайного процесса и его производной. Процесс является дифференцируемым 2-го порядка.
В результате моделирования процессов авторегрессии 1-го порядка, авторегрессии 2-го порядка, скользящего среднего 1-го и 2-го порядка и смешанного можно сделать следующие выводы: процесс АР1 дал худший результат (d2=0,123), зависимость его коэффициента корреляции имеет значительные расхождения с зависимостью в пространстве состояний (d1=0,049); процесс АР2 дал близкое приближение коэффициента корреляции (d3=0,047); моделирование процессаCC1 и СС2 не дало результата, так как рассчитанные корни из уравнения Юла-Уокера выходят за заданные границы; моделирование смешанного процесса дало результат также расходящийся с зависимостью в пространстве состояний (d4=0,067).
Критерием для выбора наилучшей модели был выбран критерий минимума среднего квадрата ошибки коэффициента корреляции, в результате наилучшее приближение обеспечила модель авторегрессии второго порядка. Эта модель и была выбрана для дальнейшего исследования и прогнозирования.
По результатам работы алгоритма линейного оценивания были получены оценки сигнала по Калману, по спектрально-финитному алгоритму и в пространстве состояний. Финитная обработка, при сравнении оценок для двух фильтров, показывает обработку хуже, чем фильтр Калмана, а также финитная обработка имеет значения дисперсий ошибок оценок большие, чем при обработке фильтром Калмана.
По результатам анализа влияния изменения параметров алгоритма в заданных пределах на поведение дисперсий можно сделать вывод о том, что большая чувствительность к изменению параметра наблюдается у дисперсии DE2A.
В результате расчета прогноза по оценке и по истинному сигналу были получены следующие результаты: при увеличении времени прогнозирования, прогноз расходится сильнее; прогноз при расчете для истинного сигнала стремится к нулю.
Список литературы.
1. Анализ временных рядов прогнозирования и управления. Том 1. Дж. Бокс, США. Г.М. Дженкинс, Великобритания 1969г.
2. Zuy_Ivanov_filtr-Modelirovanie_cos_beta.xmcd;
3. Моделирование погрешностей измерителей;
4. Медич Д. Статистически оптимальные линейные оценки и управлении. – М.: Энергия, 1973. – 336 с.
Введение.
В настоящее время происходит непрерывный процесс совершенствования авиационного оборудования летательных аппаратов в соответствии с постоянно усложняющимися задачами, решаемыми современными авиационными комплексами. Приборное оборудование является важной составной частью бортового авиационного оборудования летательного аппарата. Оно выполняет задачу получения информации о параметрах, характеризующих пространственное положение и движение летательного аппарата в воздушной среде, работу авиационных двигателей и других систем.
Научно-технический прогресс в воздушном транспорте, предъявляющий высокие требования по точности, надёжности, регулярности и безопасности полётов, приводит к большему оснащению летательных аппаратов различными информационно-измерительными приборами.
В этой работе мы предложим метод построения, идентификации, подгонки и проверки моделей временных рядов. Этот метод будет удобен для дискретных систем с выборкой данных, т. е. таких систем, в которых возможность произвести наблюдение и предпринять регулирующие действия возникает через равные интервалы времени.Мы продемонстрируем использование этих моделей временных рядов.
Прогнозирование будущих значений временного ряда по его текущим и прошлым значениям:
Использование доступных к моменту времени t наблюдений временного ряда для прогнозирования его значения в некоторый момент времени в будущем t + I может явиться основой для а) планирования в экономике и торговле; б) планирования выпуска продукции; в) складского контроля и контроля выпуска; г) управления и оптимизации промышленных процессов. Существует необходимость в прогнозе вперед на интервал, называемый временем упреждения и зависящий от конкретной проблемы.
Цель работы.
В данной работе перед нами стоят задачи:
-провести моделирование стационарного случайного процесса с заданной корреляционной функции в пространстве состояний;
-произвести анализ корреляционной функции и спектрального представления сигнала при изменении его параметров;
-исследовать методы авторегрессии первого и второго порядка, скользящего среднего первого и второго порядка и смешанную модель первого порядка;
-сравнить модели по критерию минимума среднего квадрата ошибки по коэффициенту корреляции для первой компоненты на основе модели в пространстве состояний с моделями авторегрессии 1го и 2го порядка, скользящим средним 1го и 2го порядка и смешанной моделью 1го порядка;
-разработать и исследовать алгоритм оптимальной временной финитной оценки сигналов на основе выбранной модели и провести ее сравнение по точности оценки фильтром Калмана по критерию минимума среднего квадрата ошибки оценки;
-разработать алгоритм прогнозирования сигналов на основе выбранной модели и провести ее анализ.
Исходные данные.
Стационарный случайный процесс.
Корреляционная функция данного случайного процесса [1]:
(1)
Дисперсия:
D = σ2 = 1
Начальные значения:
α = 0.01 1/с;
β = 0.01 1/с;
Моделирование случайного процесса.
Параметры моделирования.
Нахождение спектра.
Спектр находится по следующей формуле:
(2)
где:K(τ) – заданная корреляционная функция.
В результате подстановки формулы (1) в формулу (2), получим выражение для спектра данного процесса:
(3)







