Для расширения диапазона рабочих частот в задачах алгоритмической оценки параметров радиосистем могут быть применены различные методы преобразования сигнала, в том числе методы стробоскопического преобразования или трансформации спектра, приводящие к изменению масштаба времени [5]. В известном способе стробоскопического преобразования (см. рис. 1.2.1) положение каждого стробирующего импульса синхронизируется с периодом исследуемого сигнала так, чтобы получить требуемое разрешение по времени t. Частота стробирующих импульсов должна строго соответствовать выражению  , где N – целое число, ТS – период сигнала. Эквивалентная частота дискретизации при этом будет равна 1 / t. Недостатком данного способа является сложность аппаратной синхронизации входного и стробирующего сигналов в широком диапазоне частот исследуемого сигнала.
, где N – целое число, ТS – период сигнала. Эквивалентная частота дискретизации при этом будет равна 1 / t. Недостатком данного способа является сложность аппаратной синхронизации входного и стробирующего сигналов в широком диапазоне частот исследуемого сигнала.
Известен способ преобразования, в соответствии с которым стробирование осуществляется случайными импульсами, а регистрацию совпадения осуществляют только при совпадении момента считывания с соседним интервалом исследуемого сигнала, отстоящим от предыдущего на заданном расстоянии. Недостатками этого способа являются потери данных при стробировании, так как большое число данных отбрасывается, а также значительное увеличение времени преобразования, что также обусловлено потерями данных. К тому же, случайные флуктуации, которые непременно возникают на большом интервале времени, приводят к значительным погрешностям восстановления формы исследуемого сигнала.
Для устранения указанных недостатков предлагается способ несинхронизированного стробирования, который по сравнению с известным повышает быстродействие преобразования, так как для сбора требуемого массива данных и восстановления исходного сигнала требуется меньшее время. Кроме того, на коротком отрезке времени будет меньше случайных флуктуаций сигнала по частоте и уровню. В результате погрешность восстановление формы также уменьшится. Положительный эффект достигается тем, что измеряют частоту входного сигнала, и все полученные отсчеты располагают на оси времени в правильном порядке, который определяется в результате вычислений, т.е. алгоритмическим методом. Принцип работы поясняет рис. 1.2.2.

Рис. 1.2.1. Синхронизированное стробирование
Рис. 1.2.2. Несинхронизированное стробирование
Вначале измеряется период или частота входного сигнала. Массив полученных отсчетов высокочастотного сигнала запоминается, и полученные данные располагаются на оси времени в необходимом порядке ti в соответствии с выражением:
ti = jTд – iTс,
где j – порядковый номер (целое число) временного отсчета сигнала;
i – целое число, для которого выполняется условие nTс ³ jTд – iTс > 0;
n – требуемое число периодов восстановленного сигнала;
Tс и Tд – периоды сигнала и дискретизации.
Период дискретизации может быть меньше, чем период сигнала, а также больше или значительно больше, чем период сигнала. Рекомендуемый период дискретизации задается выражением:
Tд = MTс / N,
где N – требуемое количество точек (целое число) при восстановлении одного периода сигнала; M – целое число, которое задается исходя из возможностей установки требуемого значения Tд; M/N – простая дробь.
Если работать с рекомендуемым периодом дискретизации, то полное время считывания данных (оцифровки) определяется выражением: ТM=NTд. Увеличение времени анализа приведет к повторному считыванию тех же точек сигнала (в тех же временных точках восстановленного сигнала).
Если задать Tд с высокойточностью не удается, то при считывании и восстановлении сигнала точки группируются, образуя при увеличении времени анализа N групп точек. Для выбранного периода дискретизации Tд 1 следует проверить, что функция f =  –
–  имеет минимум при выбранных ранее значениях M и N. Если это не выполняется, то количество точек на период восстановленного сигнала будет определяться новым значением N, при котором функция имеет минимум. Диапазон возможных значений:
имеет минимум при выбранных ранее значениях M и N. Если это не выполняется, то количество точек на период восстановленного сигнала будет определяться новым значением N, при котором функция имеет минимум. Диапазон возможных значений:
N=ТM /Tд, M Î[1, ent ( )].
)].
Вариант построения схемы, реализующей предлагаемый способ несинхронизированного стробирования, представлен на рис. 1.2.3. Схема содержит входное устройство, АЦП, измеритель частоты, индикатор формы сигнала и вычислитель, в котором реализуется процедура перестановки точек. В зависимости от частоты сигнала вычислитель может корректировать частоту стробирования, которая для данной схемы является частотой дискретизации АЦП.
Наибольший эффект от применения предложенного способа может быть достигнут в измерительных комплексах, содержащих в своей структуре компьютер. При использовании современных плат расширения, содержащих АЦП и вставляемых в свободный слот компьютера, схема может быть значительно упрощена. Функции входного устройства, АЦП и измерителя частоты может выполнять одна плата расширения, работающая в режиме стробироования. Компьютер при этом выполняет функции вычислителя и обеспечивает всю дальнейшую обработку и представление данных, получаемых на выходе АЦП. Частота дискретизации может быть выбрана из любой физически реализуемой частоты, удовлетворяющей формулам:
Fд=1/Tд, Tд = MTс / N.
При этом нет необходимости изменять частоту дискретизации в широком диапазоне, что значительно упрощает аппаратную часть преобразователя.

Рис. 1.2.3. Устройство несинхронизированного стробирования
Интерфейс программы восстановления двух периодов сигнала представлена на рис. 1.2.4. На графиках использована кусочно-линейная аппроксимация между получаемыми точками: вверху – точками, считываемыми последовательно; внизу – точками, временное положение которых восстановлено. Исходные данные для моделирования были выбраны следующие: частота сигнала 500 МГц(TS =0.002 мкс); M =6883; N =14 (для наглядности графического представления N выбрано малым). Тогда
 =0.983285714 мкс;
=0.983285714 мкс;
Fд=1/Tд =1.0169984 МГц.
Допустим, что такую частоту дискретизации физически задать невозможно и ближайшая физически реализуемая частота 1.017 МГц. В этом случае при увеличенном времени восстановления в периоде сигнала будет не 14 точек, а 14 групп точек. Табл. 1.2.1 поясняет, как осуществляется перестановка точек при восстановлении только одного периода сигнала.
Таблица 1.2.1
| Время отсчета до (мкс) и после (нс) перестановки
|
| До
| После
| До
| После
| До
| После
| До
| После
|
| 0,983
| 1,284
| 7,866
| 0,274
| 14,749
| 1,263
| 21,632
| 0,252
|
| 1,967
| 0,569
| 8,850
| 1,558
| 15,733
| 0,547
| 22,616
| 1,537
|
| 2,950
| 1,853
| 9,833
| 0,842
| 16,716
| 1,831
| 23,599
| 0,822
|
| 3,933
| 1,137
| 10,816
| 0,126
| 17,699
| 1,116
|
|
|
| 4,916
| 0,421
| 11,799
| 1,410
| 18,682
| 0,401
| И так далее
|
| 5,900
| 1,706
| 12,783
| 0,695
| 19,667
| 1,684
|
| 6,883
| 0,989
| 13,766
| 1,979
| 20,649
| 0,967
|
В таблице на рис. 1.2.4 представлен пересчет местоположения каждой точки стробирования в две точки восстановленного сигнала (задали два периода). Граф-схема компьютерного алгоритма несинхронизированного стробирования приведена на рис. 1.2.5. Экспериментальная проверка способа показала, что его работоспособность в значительной степени определяется точностью измерения рабочей частоты.


Рис. 1.2.4. Модель восстановления двух периодов
Реальный интерес представляет анализ погрешностей измерения СКЗ при несинхронизируемом стробировании входного сигнала, когда эквивалентный шаг восстановленного сигнала является переменным.
Оценка СКЗ сигнала
В качестве конкретного примера рассмотрим случай определения СКЗ при несинхронизированном стробировании в 128 точках высокочастотного сигнала, частота которого 500 МГц (период 2 нс). Пусть частота стробирующих цифровых отсчетов мгновенных значений входного сигнала может варьироваться в диапазоне от 1,5 до 2,0 МГц. Результаты моделирования основных характеристик преобразования и возникающих при этом погрешностей представлены на рис. 1.2.6 - 1.2.7.

Рис. 1.2.5. Алгоритм несинхронизированного стробирования
На рис. 1.2.6 представлен случай гармонического входного сигнала, частота которого известна с точностью до 8 знака. Расчет погрешностей осуществлен для 100 точек частоты. При изменении частоты сигнала в пределах 6 знака возникает методическая погрешность, значение которой без корректировки частоты дискретизации при использовании формулы прямоугольников достигает 3*10-5. Если использовать обычную формулу Симпсона, то погрешность вычислений достигает 1,5*10-6, а для модернизированной формулы она не более 2,5*10-10.


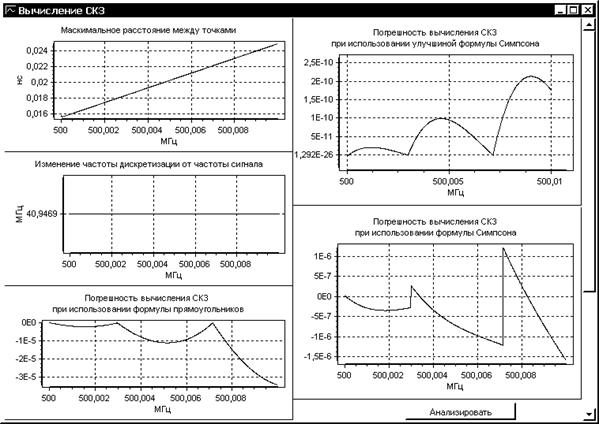
Рис. 1.2.6. Моделирование погрешностей вычисления СКЗ






