СОДЕРЖАНИЕ ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ
АНАЛИТИЧЕСКАЯ ЧАСТЬ
1.1 Введение
1.2 Назначение и применение устройства
ПРОЕКТНАЯ ЧАСТЬ
2.1 Подбор оборудования
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ
3.1 Управление устройством через интерфейс USB
3.2 Схема управления
ЭКОНОМИЧЕСКАЯ ЧАСТЬ
4.1 Экономическая эффективность использования разработанной информационной системы и расчет разработки ИС.
4.2 Расчет себестоимости одного машинного часа работы ЭВМ
4.3 Расчет экономической эффективности и срока окупаемости проектируемого программного обеспечения
ОХРАНА ТРУДА
5.1 Меры безопасности при подключении устройств автоматики к теплотехническому оборудованию
ЗАКЛЮЧЕНИЕ
ЛИТЕРАТУРА
АНАЛИТИЧЕСКАЯ ЧАСТЬ
1.1 Введение
В данном дипломном проекте будут рассмотрены повседневные задачи решаемые техническим путем и исходными данными задаваемыми в процессе программирования. Данная тема актуальна потому что в настоящий момент на мировом рынке нет такого множества устройств контроля микроклиматом с программируемой частью, так как они слишком сложны в обслуживании и настройке оптимальных значений. Разработка данного проекта включает оптимальные настройки данных для нормализации работы устройства в условиях городского микроклимата. За основу разработки будет взята некая сравнительная характеристика 2-х устройств, их ТХ, блок-схемы и другие технические данные. Также в данном проекте будут присутствовать материалы указывающие на то что различное ПО, работает по разному что и будет представлено в качестве презентации устройства. ПО будет включать пользовательские настройки, установки, цифры и нормы давления воздуха в помещении. В зависимости о погодных и природных условий данный контроллер будет работать в разном температурном диапазоне что будет способствовать нормализации окружающего давления воздуха в помещении. Контроллер представленный в данном проекте будет настраиваться так чтобы чутко контролировать любое отклонение давления воздуха от установленных норм и подстраиваться под оптимальные значения, для нормализации работы и исключения нагрузки на устройство с последующим выходом его из строя. Температурный диапазон будет базироваться на оптимальном значении который будет браться из исходных данных.
1.2 Назначение и применение устройства
Представленный в данном дипломном проектировании образец устройства служит для контроля температурного микроклимата в помещении основываясь на подключенных к нему датчиках и программного кода в котором прописываются номинал напряжения, температурного режима и нормы работы. Прибор применяется для нормализации работы нагревательного элемента в котлах с минимальными отклонениями от программируемых стандартов, а так как программирование происходит через персональный компьютер, то настройка данного вида устройств является своего рода игрой фантазии так как каждый пользователь данного устройства устанавливает свои стандарты на использование устройства.
ПРОЕКТНАЯ ЧАСТЬ
2.1 Подбор оборудования
ATmega8, ATmega8L
CodeVisionAVR
Программа представляет собой интегрированную среду разработки ПО для AVR микроконтроллеров.
Из основных достоинств CodeVisionAVR можно отметить то, что он не слишком сложен для самостоятельного освоения, поддерживает все многочисленное семейство микроконтроллеров AVR (включая чипы с ядром ATxmega), формирует емкий и результативный программный код. Помимо компилирования среда разработки способна записать созданную программу в память микроконтроллера. Модуль прошивки может взаимодействовать со всеми популярными программаторами (AVR910, STK200/300 и многими другими). Редактор позволяет работать с двумя проектами одновременно, размещать закладки, настраивать время автоматического сохранения результатов

Рисунок 2 окно для задания конфигурации при прошивании микроконтроллера СodeVision AVR
Основными модулями, входящими в состав CodeVisionAVR являются:
• трансляторы программ, составленных на Си-подобных языках или ассемблере, в машинный код для AVR;
• элементы для инициализации периферийных устройств;
• модуль для работы с платой отладки STK-500;
• компоненты взаимодействия с внешними программаторами;
• редактор первичного кода;
• терминальный модуль.
Результат работы в программе CodeVisionAVR может быть представлен в виде HEX, ROM или BIN-файла для прямой прошивки микроконтроллера путем использования стороннего программатора. Кроме этого, программа может быть передана в формате COFF (файл отладчика) или OBJ. Число библиотек CodeVisionAVR растет с каждой новой версией и включает в себя поддержку продукции от таких известных производителей как Philips,NationalSemiconductor, Maxim-DallasSemiconductor и многих других.
Компилятор CodeVisionAVR отличается от AVR-GCC, который можно наблюдать в программе WinAVR, синтаксисом, количеством поддерживаемых микроконтроллеров ибыстродействием конечного кода. Но больше всего по специфике работы, расположению команд и своим возможностям программа напоминает PonyProg.
При работе важно не забывать, что процедура прошивки самой программы, fuse битов и ПЗУ в CodeVisionAVR являются самостоятельными процедурами. Разработчик рекомендует сначала прописать пользовательский код, затем EEPROM-память, а в конце fuse’ы. Чтобы убедиться, что CodeVisionAVR обнаружил внешний программатор, который подключается к LPT порту рабочей станции, необходимо нажать кнопку «ResetChip». При этом на программаторе обязаны загореться индикаторы чтения/записи.

Рисунок 3 окно рабочей программы
Разработчик программы – компания HP InfoTech, расположенная в столице Румынии, городе Бухаресте. Работники фирмы постоянно трудятся над своим продуктом, улучшая оптимизатор кода и ускоряя работу компоновщика. Число пользователей, купивших данный софт, составляет более 13000 человек.
Существует две версии программы: CodeVisionAVREvaluation – бесплатный ознакомительный вариант с ограничением до четырех килобайт размера программногокода и отсутствием ряда ключевых библиотек и CodeVisionAVR – платная коммерческая, защищенная от установки паролем.
Интерфейс CodeVisionAVR английский и русификатора к нему нет.
Требуемая платформа для установки – Windows 95, 98, 2000, XP, Vista и 7. Поддерживаются 32- и 64-разрядные операционные системы.
Распространение программы: Evaluation (бесплатная с ограничением на код 4 кБ и урезанным количеством библиотек) и Shareware (платная), цена – от 45 евро
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ
В данной части будет показан процесс экспериментального использования устройства, подключение к нему внешних датчиков и устройств а также пробные запуски и реакция на те или иные действия пользователя
3.1 Управление устройством через интерфейс USB
Описание
Модуль Ke-USB24A предназначен для сопряжения внешних цифровых и аналоговых устройств, датчиков и исполнительных механизмов с компьютером через шину USB. Определяется как дополнительный (виртуальный) COM порт. Модуль имеет 24 дискретные линии ввода/вывода (либо лог. 0 либо лог. 1) с возможностью настройки направления передачи данных (вход/выход) и встроенный 10-ти разрядный АЦП. Для управления модулем предусмотрен набор текстовых команд управления (KE – команды).
Отличительные особенности:
· интерфейсный модуль для сопряжения по шине USB
· определяется ОС Windows/Linux как виртуальный COM порт
· не требует дополнительных схемных элементов, сразу готов к работе
· 24 дискретные линии ввода/вывода с возможностью независимой настройки направления передачи данных (вход/выход) и сохранения настроек в энергонезависимой памяти модуля
· встроенный 10-ти разрядный АЦП с гарантированной частотой дискретизации до 400 Гц.
· динамический диапазон напряжения входного аналогового сигнала для АЦП от 0 до 5 В
· набор готовых текстовых команд управления высокого уровня (KE – команды)
· удобный форм-фактор в виде модуля с DIP-колодкой и разъемом USB-B
· возможность питания как от шины USB так и от внешнего источника питания (режим выбирается джамперомна плате)
· возможность сохранения данных пользователя в энергонезависимой памяти модуля (до 32 байт)
· возможность изменения строкового дескриптора USB устройства
· каждый модуль имеет уникальный серийный номер доступный программно
· поддержкаОС Windows XP 32/64 bit, Vista 32/64 bit и Windows 7 32/64 bit
· поддержка OS Linux
Вроде бы это то, что нам нужно, НО… цена этого чуда начинается от $40. Наверно у вас уже пропало желание его покупать))).
Давайте лучше сами соберем подобный модуль, только чтобы он был доступный даже голодному студенту!
Из обязательных критериев: дешевизна и легко доступность компонентов, простота сборки.
В качестве микроконтроллера возьмем широко распространенный Atmega8 (без индекса L в конце). Характеристики нашего модуля будут такие:
· Подключение к ПК через USB.
· определяется ОС Windows как USB HID устройство, не требующее драйверов.
· Сразу готов к работе.
· 7 линий вывода с логическим состоянием (активен/неактивен).
· 2 линии вывода с плавным управлением напряжения от минимума до максимума. Только это не ЦАП(цифрово-аналоговый преобразоватль) а ШИМ (широтно-импульсная модуляция). Но с помощью фильтра можно легко превратить в ЦАП.
· 7 линий ввода с логическим состоянием (активен/неактивен).
· 1 АЦП(аналогово-цифровой преобразователь) с возможностью подключения внешнего источника опорного напряжения (ИОН).
· Возможность заливать новую прошивку прямо через USB.
Почему я выбрал именно HID а не виртуальный COM порт (CDC)? Во первых, не нужны драйвера, во вторых – HID в несколько раз меньше грузит микроконтроллер чем CDC, так как данные запрашиваются не постоянно, а только тогда, когда этого требует хост (компьютер), и вообще, COM порт уже отмирает, сейчас аппаратных COM портов уже практически нет, остались только виртуальные. Логические линии вывода предназначены для управления только двумя состояниями – включенный или выключенный, при выключенном на выходе (ножке микроконтроллера) будет 0В при включенном – 5В, сюда вы можете подключить просто светодиод и управлять ним с ПК, а можете подключить реле (через транзистор) и управлять более мощной нагрузкой (освещение и т.д.). Линии вывода с регулировкой напряжения(ШИМ выход) позволяют плавно менять напряжение на ножке микроконтроллера от 0В до +5В с шагом 5/1024В. Линии ввода с логическим состоянием предназначены для мониторинга состояния кнопок, ключей и т.д. Когда линия замкнута на землю (корпус, GND), ее состояние = 0, если не замкнута – 1. АЦП позволяет измерять напряжение, сюда можно подключить потенциометр, аналоговый термодатчик, или еще что то, только напряжение, на этой ножке не должно превышать напряжение питания. В качестве источника опорного напряжения для АЦП можно использовать как внешний ИОН, так и напряжение питания модуля. Чтобы при перепрошивке не приходилось подключать микроконтроллер к программатору, сделаем возможность заливки прошивки прямо через USB, без использования внешнего программатора.
Схема устройства:
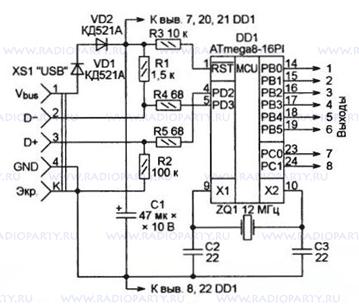
Рисунок 8 схема устройства компьютерного управления прибором Atmega8
Как видите, схема достаточно проста, только коннекторы я прикрепил на схеме не по порядку, это потому что у Atmega8 ножки каждого порта почему то расположены в разброс, зато на самой плате будет выглядеть красиво.
Печатная плата:

Рисунок 9 печатная плата микроконтроллера Atmega8
Ну и в результате получилось вот что:

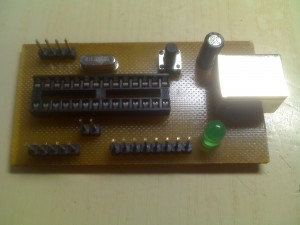
Рисунок 10 Плата микроконтроллера Atmega8 вид снизу и сверху
Теперь разберемся что куда будем подключать.
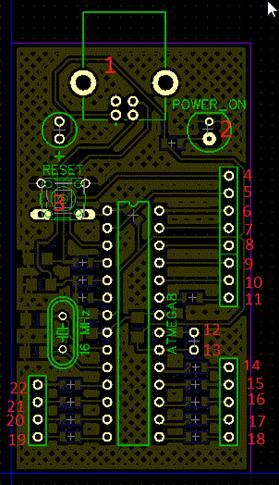
Рисунок 11 Описание уплавляющих микросхем
1. USB – Порт. Думаю его все знают.
2. Индикатор питания.
3. Кнопка сброса (перезагрузка).
4. Логический вход 1.
5. Логический вход 2.
6. Логический вход 3.
7. Логический вход 4.
8. Логический вход 5.
9. Логический вход 6.
10. Логический вход 7.
11. Вход АЦП.
12. Вход для подключения ИОН.
13. Этот контакт подключен к питанию устройства. Замкните перемычкой 12 и 13 контакты чтобы напряжение ИОНа было равно напряжения питания.
14. Логический выход 1.
15. Логический выход 2.
16. ШИМ выход 1.
17. ШИМ выход 2.
18. Логический выход 3.
19. Логический выход 4.
20. Логический выход 5.
21. Логический выход 6.
22. Логический выход 7.
Что такое GND?
Даже начинающий радиолюбитель знает что такое GND, но некоторым людям это кажется страшным буквами. GND – это, так сказать, общий контакт. Его еще называют землей и массой. Провод обычно черного света (иногда белого или еще какого нить). GND также подключается к металлическому корпусу устройства. На плате в большинстве случаев все свободное место заполняет GND в виде больших полигонов. На нашем модуле есть полигоны в виде сеточки, они так же соединяются с корпусом USB – разъема.
Прошивка устройства.
В скачанных файлах в папке MCUusb_bootloader найдите файл main.hex – это usb-bootloader, его нужно залить в МК с помощью внешнего программатора. После заливки также нужно правильно установить фьюзы, в окне программатора STK500 должно выглядеть так:

Рисунок 12 прошивка устройства через универсальную плату STK500
Если вы пользуетесь другой программой, то можете просто ввести значения фьюз-битов HIGH и LOW (смотрите на скрин).
После удачной прошивки, можно попробовать прошить устройство через бутлоадер. Как он работает? При включении МК (просто при подаче питания, или после ресета) сразу запускается бутлоадер, он проверяет условие, если оно истинно, то запускается инициализация бутлоадера (комп при этом находит устройство). В качестве условия у нас будет «Логический вход 1 = 0″, то есть, чтобы запустить бутлоадер, нужно замкнуть Логический вход 1 на GND и нажать на устройстве кнопку RESET, в диспетчере устройство должно появиться новое HID устройство, так же не требующее драйверов:
Рисунок 13 отображение устройства в диспетчере устройств
Такс, теперь в папке MCUUSB_Controldefault запускаем файл boot.bat, должно выскочить окошко, в котором будут бегать циферки:

Рисунок 14 рабочее окно boot.bat
Если окно сразу же закрылось, тогда вы сделали что то не правильно. Если же все ок, тогда внешний программатор для этого устройства Вам уже не понадобится. Теперь можете отключить Логический вход 1 от GND. И на всякий случай, нажмите RESET. В диспетчере устройств так же должно появиться HID устройство (комп напишет что найдено новое). Убедитесь, что в диспетчере появилось именно это устройство.

Рисунок 15 Окно свойств HID-совместимого устройства
Хост – это то, что будет управлять устройством, в нашем случае – компьютер. Управление устройством с ПК я опишу более подробно.
Для программистов Delphi написать прогу управления HIDом не составит проблем так как в инете куча инфы. А вот программистам C++ Builder не все так сладко, но, как оказалось, не так все и плохо))). В инете я нарыл библиотеку hidlibrary.h, вот с ее помощью мы будет работать с HID устройством.
Скачайте исходники и запустите USB Control.cbproj (C++ Builder 2010).
В файле hidlibrary.h в самом верху есть строка
|
| const char idstring[] = “vid_0010&pid_0001”;
|
Да-да, это те же самые ID, которые мы указывали в usbconfig.h. Если будете менять VID and PID, то не забывайте отредактировать эту строку. Кроме данной строки в файле hidlibrary.h нам больше ничего редактировать не нужно, можете его закрыть.
Открываем main.cpp, вверху указан относительный адрес к файлу usbconfig.h», это нужно чтобы библиотека HID знала имя вендора и продукта.
|
| #include “../MCU/USB_Control/usbdrv/usbconfig.h”
|
Создадим форму, на форме будет один CheckListBox для управления логическими выходами, 2 ScrollBar для управления ШИМ каналами, один ListBox для отображения логических входов, один Label для отображения состояния АЦП и один таймер. Должно получиться вот такое:

Рисунок 16 рабочее окно программы для создания формы CheckListBox
Переименуйте СкрулБары в ScrollBar_PWM1 и ScrollBar_PWM2, в их свойствах установите Max=1023.
Создадим структуру
|
| #pragma pack (push, 1)
structstatus_t{
unsigned char logical_outputs;
unsigned char logical_inputs;
unsigned char ADC_DATA;
unsigned short int PWM1;
unsigned short int PWM2;
};
structstatus_t DeviceStatus;
#pragmapack(pop)
|
#pragmapackнужна чтобы компилятор не выравнивал структуру. В logical_outputs хранятся состояние всех логических выходов, в побитном режиме, то есть, первый бит хранит состояние первого выхода, второй – второго и так до седьмого. Аналогично logical_inputs хранит состояние логических входов. В ADC_DATA хранится состояние АЦП, минимальное значение 0, максимальное – 255. В PWM1 хранится состояние первого ШИМ выхода (плавная регулировка напряжения), в PWM2 – состояние второго, минимальное значение 0, максимальное – 1023.
В программе ПК нужно считать с микроконтроллера эту структуру, ну и далее обработать принятые данные. Чтобы установить новые значения выходов, нужно сначала записать в структуру новые значения, а потом отправить измененную структуру на микроконтроллер. При установке новых значений нужно редактировать только первый, 4 и 5 элементы, редактирование остальных двух не даст никакого эффекта.
Далее создаем экземпляр класса
И добавляем функцию connect().
|
| intconnect(void)
{
inti, n, res=0;
string exampleDeviceName = “”;
exampleDeviceName += vendorName;
exampleDeviceName += “ “;
exampleDeviceName += productName;
n = hid.EnumerateHIDDevices();
for (i=0; i<n; i++) // ищем наше устройство
{
hid.Connect(i);
// GetConnectedDeviceName() возвращает string,
// где через пробел указаныvendor и productName.
// Сравниваем, если совпало – значить устройство наше
if (hid.GetConnectedDeviceName() == exampleDeviceName)
{
res = 1;
break;
}
}
returnres;
}
|
Теперь данные с HID-устройства можно запросить с помощью функции hid.ReceiveData, указав в качестве параметра указатель на структуру, только перед запросом нужно проверить, подключено ли устройство:
|
| if (connect()) hid.ReceiveData(&DeviceStatus);
|
Аналогично можно передать данные в устройство:
|
| if (connect()) hid.SendData(&DeviceStatus);
|
А теперь давайте допишем нашу программу (или просто скачайте исходники, там все готовое))).
Добавьте где нить в коде (лучше сразу после структуры) эти строки:
|
| char vendorName[] = {USB_CFG_VENDOR_NAME, 0};
char productName[] = {USB_CFG_DEVICE_NAME, 0};
|
Так как нужно будет работать с отдельными битами, объявим несколько дефайнов:
|
| #define sbi(reg,bit) reg |= (1<<bit) // установитьбит
#define cbi(reg,bit) reg&= ~(1<<bit) // сброситьбит
#define ibi(reg,bit) reg ^= (1<<bit) // инвентироватьбит
#define CheckBit(reg,bit) (reg&(1<<bit)) // проверитьбит
|
В свойствах таймера укажите Enabled = True, Interval = 500. Щелкните по нем дважды и в обработчике напишите
|
| if (!connect()) return; // Выходим, если устройство не подключено
hid.ReceiveData(&DeviceStatus); // Читаем данные с устройства
for (char i = 0; i< 7; i++)
CheckListBox_LogOuts->Checked[i] = CheckBit(DeviceStatus.logical_outputs, i);
ScrollBar_PWM1->Position = DeviceStatus.PWM1;
ScrollBar_PWM2->Position = DeviceStatus.PWM2;
ListBox_LogInputs->Clear();
for (char i = 0; i< 7; i++)
ListBox_LogInputs->Items->Add(“ Лог. Вход “+IntToStr(i+1)+” = “
+BoolToStr(CheckBit(DeviceStatus.logical_inputs, i)));
Label_ADC->Caption = DeviceStatus.ADC_DATA;
|
Думаю, тут все понятно и объяснений не требует.
Кликните дважды по CheckListBox, в обработчике напишите
|
| for (char i = 0; i< 7; i++)
{
if (CheckListBox_LogOuts->Checked[i]) sbi(DeviceStatus.logical_outputs, i);
else cbi(DeviceStatus.logical_outputs, i);
}
if (connect()) hid.SendData(&DeviceStatus);
|
Тут копируется состояние чекбоксов в элемент структуры, после чего структура отправляется в МК.
Осталось сделать управление ШИМ выходами. Кликните один раз по ScrollBar_PWM1, зажмите Shift и выбирите ScrollBar_PWM2, короче нужна выделить 2 скрулбара, слева откройте события (Events) и в OnChange укажите тот же обработчик, что и в CheckListBox, а в обработчике пред последней строкой добавьте:
|
| DeviceStatus.PWM1 = ScrollBar_PWM1->Position;
DeviceStatus.PWM2 = ScrollBar_PWM2->Position;
|
Все, можно компилировать!
Тест-драйв.
Итак, все готово: устройство собрано, микроконтроллер прошит, программа для компа создана, можно протестировать.
Подключите устройство к ПК, запустите программу. Слева в листбоксе отображается состояние всех логических входов, если, к примеру, Логический вход 1 не замкнут на GND, тогда будет написано «Лог. Вход 1 = -1″, если подключен, то «Лог. Вход 1 = 0″. Вот скрин:
Рисунок 17 отображение логических входов при подключении устрйства к ПК
Под этим листбоксом отображается результат преобразования АЦП. Замкните вход АЦП на минус, тогда результат будет равен 0, замкните на + питания, результат будет 255. Можно подключить сюда потенциономер, или еще что. Напряжение на ножке АЦП можно вычислить по формуле: Напряжение_ИОН/255*результат_АЦП.
Теперь подключите какую то маленькую нагрузку к Логическом выходу 1 (светодиод или просто вольтметр). Поставьте галочку возле «Лог. Выход 1″ – светодиод загорится.
Подключите вольтметр к первому ШИМ каналу, покрутите ползунок – напряжение будет меняться.
Завершение.
Теперь можете сделать на основе этого модуля управление освещением или ещё какими то электроприборами. К логическим входам можно подключить кнопку дверного звонка или какой то другой ключ. К входу АЦП можете подключить аналоговый датчик влажности, термодатчик или фоторезистор (будете занать, ночь на улице или день).
3.2 Схема управления

Рисунок 18 схема устройства электрической цепи на плате микроконтроллера Atmega8
ЭКОНОМИЧЕСКАЯ ЧАСТЬ
4.1 Экономическая эффективность использования разработанной информационной системы и расчет разработки ИС.
Экономическую эффективность определяют с помощью трудовых и стоимостных показателей. Основным при расчетах является метод сопоставления данных при ручной и автоматизированной обработке информации. Экономическая эффективность разработки программного продукта образуется за счет экономии времени необходимого на обработку того же объема документа вручную. Расчет состоит из этапов:
· расчет трудоемкости разработки ИС
· расчет экономии от внедрения ИС
ОХРАНА ТРУДА
5.1 Меры безопасности при подключении устройств автоматики к теплотехническому оборудованию
В целях соблюдения мер безопасности стоит соблюдать следующие нормы и правила:
1) Во избежание взрывоопасных ситуаций теплотехническое оборудование следует размещать вдали от легко воспламеняющихся смесей и жидкостей
2) Не допускается расположения ящиков, ветоши и других вещей вблизи электрического оборудования
3) При монтаже платы управления следует пользоваться рукавичками во избежание поражения электрическим током
4) При подключении приборов с электроникой следует помнить о полярности дабы не вызвать пожар
5) Монтаж оборудования и его подключение следует выполнять строго инструкции прославляемой с данным оборудованием
Запрещается оставлять без присмотра включенное теплотехническое оборудование.
При отключении электроэнергии всё теплотехническое оборудование должно быть немедленно выключено.
1. Запрещается эксплуатация теплообменных аппаратов после истечения срока очередного их освидетельствования иливыявлениядефектов, угрожающих нарушением надежной и безопасной работы, при отсутствии или неисправности элементов их защит и регуляторов уровня, о чем должна быть произведена запись в паспорте теплообменного аппарата с указанием причины запрещения.
2. Запрещается во время работы теплотехнического аппарата проведение его ремонта или работ, связанных с ликвидацией неплотностей соединений отдельных элементов аппарата, находящихся под давлением, за исключением случаев, оговоренных в п. 14 настоящих Правил.
3. Исправность предохранительных клапанов, манометров и другой арматуры теплотехнического аппарата должен проверять обслуживающий персонал в соответствии с инструкцией по обслуживанию теплотехнических аппаратов.
4. Подлежащий ремонту теплотехнического аппарат или участок теплового котла во избежание попадания в него пара или горячей воды должен быть отключен со стороны как смежных трубопроводов и оборудования, так и дренажных и обводных линий. Дренажные линии и воздушники, сообщающиеся непосредственно с атмосферой, должны быть открыты.
5. Отключать теплотехнические аппараты (трубопроводы) необходимо двумя последовательно установленными задвижками. Между ними должно быть дренажное устройство, соединенное непосредственно с атмосферой.
В отдельных случаях, когда нельзя отключить для ремонта теплотехнический аппарат (трубопровод) двумя последовательными задвижками, допускается с разрешения главного инженера предприятия отключать ремонтируемый участок одной задвижкой. При этом не должно быть парения (утечки) через открытый на времяремонта на отключенном участке дренаж в атмосферу. Разрешение главного инженера фиксируется его подписью на полях наряда.
В случае отключения одной задвижкой теплотехнических аппаратов и трубопроводов от действующего оборудования с температурой воды не выше 45 С разрешение главного инженера на такое отключение не требуется.
6. С теплотехнических аппаратов и трубопроводов, отключенных для ремонта, следует снять давление и освободить их от пара и воды. С электроприводов отключающей арматуры – снять напряжение, а с цепей управления электроприводами – предохранители.
Вся отключающая арматура должна быть в закрытом состоянии. Вентили дренажей, соединенных непосредственно с атмосферой, должны быть открыты. Вентили дренажей закрытого типа после дренирования теплообменного аппарата (трубопровода) должны быть закрыты; между запорной арматурой и теплотехническим аппаратом (трубопроводом) должна быть арматура, непосредственно соединенная с атмосферой. Отключающая арматура и вентили дренажей должны быть обвязаны цепями или заблокированы другими приспособлениями, запертыми на замки.
На вентилях и задвижках отключающей арматуры следует вывешивать плакаты и знаки безопасности «Не открывать – работают люди»; на вентилях открытых дренажей - «Не закрывать – работают люди»; на ключах управления электроприводами отключающей арматуры - «Не включать – работают люди»; на месте работы - «Работать здесь!».
Приступать к ремонту аппаратов и трубопроводов при избыточном давлении в них запрещается. Дренирование воды и пара должно производиться через дренажную арматуру.
7. Открывать и закрывать задвижки и вентили с применением рычагов, удлиняющих плечо рукоятки или маховика, не предусмотренных инструкцией по эксплуатации арматуры, запрещается.
8. Для проведения ремонтных работ на одном из подогревателей высокого давления при групповой схеме их включения должна отключаться вся группа подогревателей.
9. При работе людей внутри теплотехнических аппаратов, а также при недостаточной плотности отключающей фланцевой арматуры ремонтируемое оборудование должно быть отделено от действующего с помощью заглушек, толщина которых должна соответствовать параметрам рабочей среды. Для облегчения проверки установки заглушек последние должны иметь хорошо видимые хвостовики.
Разрешается отключать одной задвижкой (без заглушек) теплотехнические аппараты по тем потокам, рабочее давление в которых не выше атмосферного и температура теплоносителя не более 45 С.
10. При выводе в ремонт оборудования со взрывоопасными, ядовитыми и агрессивными веществами необходимо его отключить, опорожнить, очистить (промыть, продуть) и отделить заглушками от действующего оборудования независимо от давления и температуры транспортируемых веществ.
11. При опробовании и прогреве трубопроводов пара и воды подтяжку болтов фланцевых соединений следует производить при избыточном давлении не выше 0,5 Мпа (5 кгс/см2).
Сальники стальных компенсаторов следует подтягивать при давлении не выше 1,2 Мпа (12 кгс/см2) осторожно, чтобы не сорвать болты.
Заменять сальниковую набивку компенсаторов разрешается после полного опорожнения трубопровода.
12. На всех фланцевых соединениях болты следует затягивать постепенно, поочередно с диаметрально противоположных сторон.
13. Для устранения течи через резьбу соединительные штуцеры контрольно-измерительной аппаратуры следует подтягивать только гаечными ключами, размер которых должен соответствовать граням подтягиваемых элементов. При этом давление среды в импульсных линиях не должно превышать 0,3 Мпа и температурой воды 45 °С (3 кгс/см2).
Применение для этих целей других ключей, а также удлиняющих рычагов запрещается.
Перед подтягиванием следует проверить состояние видимой части резьбы, особенно на штуцерах воздушников.
При подтягивании резьбового соединения рабочий должен располагаться с противоположной стороны от возможного выброса струи воды или пара при срыве резьбы.
14. Прогрев и пуск паропроводов должны производиться в соответствии с местной инструкцией или по специальной программе.
15. При прогреве паропровода сначала следует открывать дренажи, потом медленно и осторожно байпасы (паровые вентили). В случае возникновения гидравлических ударов прогрев необходимо прекратить до их исчезновения и принять меры к устранению причин, вызвавших эти удары.
Если устранить засорение продувкой невозможно, следует полностью отключить паропровод и прочистить дренажный штуцер.
Рабочий, ведущий продувку дренажного штуцера, должен находиться на стороне, противоположной выходу дренируемого конденсата или пара, и выполнять эту работу в рукавицах.
16. Продувку паропроводов следует осуществлять по специальным программам, утверждаемым руководством монтажной, ремонтной или пусконаладочной организации (участка) и согласованным с руководством предприятия (цеха).
Временный трубопровод в местах обслуживания должен быть покрыт изоляцией. Опора для концевой части трубы, выходящей за пределы здания, должна быть надежно закреплена. Территория в месте выхода выхлопной трубы временного продувочного паропровода должна быть ограждена, по ее границам выставлены наблюдающие. Место выхлопа должно быть выбрано с таким расчетом, чтобы в опасной зоне не было персонала, механизмов и оборудования.
Леса и подмости около продуваемого паропровода должны быть разобраны.
При появлении признаков гидравлических ударов должна быть немедленно прекращена подача пара в паропровод и полностью открыты все дренажи.
Персонал, участвующий в продувке, должен быть обеспечен противочумными наушниками или вкладышами.
ЗАКЛЮЧЕНИЕ
Данный проект был создан на основе анализа рынка и охраны труда при работе с теплотехническим оборудованием. В нем отражены как схемы так и методы работы и с оборудованием и с настройкой и наладкой оборудования. Ценность практического применения состоит в том, что модули управления котлами которые всё больше находят применения в коттеджах и частных домах электронная часть недостаточно надёжная и выходит из строя. Стоимость доходит до 9000 т.р. поэтому предлагаемый мною модуль может заменить частично или полностью в зависимости от функциональности котла штатные модули управления. Себестоимость моего модуля 500 р. Наработка на отказ ориентировался на характеристики Attmega 8. Мною предлагаемая модель универсальная: в неё можно установить программу под любой тип котла управляемый электронным модулем.
ЛИТЕРАТУРА
- http://www.gaw.ru/html.cgi/txt/app/Atmel/micros/avr/stk500/3.htm
- http://eldigi.ru/articles/upravlenie_elektricheskimi_cepyami_cherez_usb
- http://cvavr.ru/avr/64-upravlenie-nagruzkoj-cherez-usb-interfejs
- http://www.wikipedia.ru
- Дипломный проект от А до Я: Учебное пособие. – М.: СОЛОН-Пресс, 2004
- http://electricalschool.info/spravochnik/
- http://www.bankreferatov.ru
- http://www.cleper.ru/research-literature/index.php
- http://norma.org.ua/knigi/2/soderganie.php
- ГОСТ 7.32-2001 Структура и правила оформления научно-исследовательских отчетов
- ГОСТ 2.105-95 Общие требования к текстовым документам
- ГОСТ 7.0.5-2008 Библиографическая ссылка
- ГОСТ 7.1-2003 Библиографическая запись
- ГОСТ 7.80-2000 Оформление заголовка
- ГОСТ 7.82-2001 Библиографическое описание электронных ресурсов
- ГОСТ 2.111-68 Единая система конструкторской документации (ЕСКД)
- ГОСТ 7.9-95 Реферат и аннотация, общие требования
- ГОСТ 7.9-70 Система библиографической документации
- ГОСТ 7.32-2001 Система стандартов по информации, библиотечному и издательскому делу
- ГОСТ 9327-60 Бумага и изделия из бумаги потребительские форматы
- ГОСТ 7.12-93 Библиографическая запись сокращение слов на русском языке
СОДЕРЖАНИЕ ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ
АНАЛИТИЧЕСКАЯ ЧАСТЬ
1.1 Введение
1.2 Назначение и применение устройства
ПРОЕКТНАЯ ЧАСТЬ
2.1 Подбор оборудования
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ
3.1 Управление устройством через интерфейс USB
3.2 Схема управления
ЭКОНОМИЧЕСКАЯ ЧАСТЬ
4.1 Экономическая эффективность использования разработанной информационной системы и расчет разработки ИС.
4.2 Расчет себестоимости одного машинного часа работы ЭВМ
4.3 Расчет экономической эффективности и срока окупаемости проектируемого программного обеспечения
ОХРАНА ТРУДА
5.1 Меры безопасности при подключении устройств автоматики к теплотехническому оборудованию
ЗАКЛЮЧЕНИЕ
ЛИТЕРАТУРА
АНАЛИТИЧЕСКАЯ ЧАСТЬ
1.1 Введение
В данном дипломном проекте будут рассмотрены повседневные задачи решаемые техническим путем и исходными данными задаваемыми в процессе программирования. Данная тема актуальна потому что в настоящий момент на мировом рынке нет такого множества устройств контроля микроклиматом с программируемой частью, так как они слишком сложны в обслуживании и настройке оптимальных значений. Разработка данного проекта включает оптимальные настройки данных для нормализации работы устройства в условиях городского микроклимата. За основу разработки будет взята некая сравнительная характеристика 2-х устройств, их ТХ, блок-схемы и другие технические данные. Также в данном проекте будут присутствовать материалы указывающие на то что различное ПО, работает по разному что и будет представлено в качестве презентации устройства. ПО будет включать пользовательские настройки, установки, цифры и нормы давления воздуха в помещении. В зависимости о погодных и природных условий данный контроллер будет работать в разном температурном диапазоне что будет способствовать нормализации окружающего давления воздуха в помещении. Контроллер представленный в данном проекте будет настраиваться так чтобы чутко контролировать любое отклонение давления воздуха от установленны<






