

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
Топ:
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Марксистская теория происхождения государства: По мнению Маркса и Энгельса, в основе развития общества, происходящих в нем изменений лежит...
Интересное:
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Для установившегося режима работы р=0 (t→∞) и из (3.39) получаем уравнения статических электромеханической
 (3.40)
(3.40)
и механической
 (3.41)
(3.41)
характеристик,
где IЯ – ток якоря ДПТ НВ в установившемся режиме работы.
Уравнения (3.40) и (3.41) – это уравнения прямых, не проходящих через начало координат (рис. 3.12) электромагнитный момент

М=сIЯ (3.42)
пропорционален току якоря.
Статические характеристики ДПТ НВ разделяют на естественные и искусственные. Естественной называется характеристика, соответствующая нормальной схеме включения электродвигателя при номинальном напряжении якоря, отсутствии добавочных сопротивлений в якорной цепи и номинальном магнитном потоке.
При этом электродвигатель имеет наибольшее значение модуля жесткости механической характеристики
 (3.43)
(3.43)
где  - собственное сопротивление якорной цепи ДПТ НВ.
- собственное сопротивление якорной цепи ДПТ НВ.
Механические и электромеханические характеристики, получаемые при условиях, отличающихся от указанных выше, называются искусственными. Очевидно, электродвигатель имеет одну естественную (электромеханическую и механическую) и бесконечное множество искусственных характеристик. Искусственные характеристики, полученные включением добавочных сопротивлений в цепь якоря, называются реостатными.
Если собственное сопротивление  якорной цепи неизвестно, его можно определить по приближенной формуле
якорной цепи неизвестно, его можно определить по приближенной формуле

где 
 - номинальный к.п.д. электродвигателя.
- номинальный к.п.д. электродвигателя.
Собственная индуктивность LЯ,0 якорной цепи может быть также рассчитана по приближенному выражению
 ,
,
где kL=0,25 для электродвигателей с компенсационной обмоткой,
kL=0,6 – без компенсационной обмотки.
Постоянная электродвигателя С рассчитывается через номинальные значения ЭДС ЕНОМ и угловой скорости ωНОМ:
|
|

причем угловая скорость определяется через частоту вращения nНОМ (об/мин):
 .
.
41. ВЛИЯНИЕ ПАРАМЕТРОВ НА СВОЙСТВА И ХАРАКТЕРИСТИКИ ДПТ НВ
Параметры ДПТ НВ: напряжение на якоре U, сопротивление якорной цепи RЯ и магнитный поток Ф могут принимать значения, отличающиеся от номинальных:
 (3.43)
(3.43)
где  , (3.44)
, (3.44)
 , (3.45)
, (3.45)
 ,
,  ,
,  – номинальные значения напряжения, тока якоря и магнитного потока,
– номинальные значения напряжения, тока якоря и магнитного потока,
 – номинальное сопротивление, определяемое как суммарное сопротивление якорной цепи, ограничивающее ток номинальным значением при номинальном напряжении и неподвижном якоре двигателя.
– номинальное сопротивление, определяемое как суммарное сопротивление якорной цепи, ограничивающее ток номинальным значением при номинальном напряжении и неподвижном якоре двигателя.
Подставляя (3.43) в (3.40) , находим
 (3.46)
(3.46)
Разделим на ω0 левую и правую части (3.46):
 (3.47)
(3.47)
Так как
сω0=UНОМ, (3.48)
то
 (3.49)
(3.49)
что с учетом (3.44) даст
 (3.50)
(3.50)
Введем обозначения безразмерных величин:
 (3.51)
(3.51)
 (3.52)
(3.52)
и получим окончательное выражение электромеханической характеристики ДПТ НВ в относительных безразмерных величинах при произвольных значениях параметров
 (3.53)
(3.53)
Относительное значение электромагнитного момента
 (3.54)
(3.54)
Обозначим
 (3.55)
(3.55)
получаем
 (3.56)
(3.56)
что позволяет с помощью (3.53) получить уравнение механической характеристики ДПТ НВ в относительных безразмерных величинах
 (3.57)
(3.57)
Влияние параметров на характеристики ДПТ НВ исследуем, варьируя один из трех параметров.
1) Изменяется подводимое к электродвигателю напряжение U при номинальном магнитном потоке ФНОМ и неизменном значении сопротивления RЯ якорной цепи, т.е.
 (3.58)
(3.58)
Это соответствует питанию якоря электродвигателя от управляемого преобразователя напряжения УПН (рис. 3.13).

Подставив (3.58) в (3.53) и (3.57), получим
 (3.59)
(3.59)
Жесткость безразмерной механической характеристики (3.57) равна
 (3.60)
(3.60)
При ρ=const все безразмерные механические характеристики, получаемые при разных значениях γ, будут иметь одну жесткость, т.е. они будут параллельными (рис. 3.14).

Определим ток и момент короткого замыкания электродвигателя из условия υ=0:
|
|
 (3.61)
(3.61)
откуда
 (3.62)
(3.62)
2) Изменяется сопротивление якорной цепи RЯ при номинальном напряжении UНОМ и номинальном магнитном потоке ФНОМ, т.е.
 (3.63)
(3.63)
Подстановка (3.63) в (3.53) и (3.57) приводит к уравнениям:
 (3.64)
(3.64)
Как следует из (3.60), жесткость безразмерных механических характеристик изменяется обратно пропорционально суммарному относительному сопротивлению якорной цепи. Ток и момент короткого замыкания определяются зависимостью
 (3.65)
(3.65)
Данному варианту исследования соответствует схема, приведенная на рис. 3.15 и характеристики – на рис. 3.16.


Как следует из (3.64), при номинальном токе (моменте) μ=ι=1 и
 (3.66)
(3.66)
т.е. относительное падение скорости Δυ, или скольжение S, численно равно суммарному относительному сопротивлению якорной цепи (рис. 3.17).

Выражение (3.66) удобно использовать при расчете сопротивлений различных реостатных характеристик.
3) Изменение магнитного потока Ф при номинальном напряжении UНОМ и неизменном сопротивлении RЯ якорной цепи, т.е.
 (3.67)
(3.67)
этому случаю соответствует схема на рис. 3.18.

Рассмотрим сначала электромеханическую характеристику (3.53). При υ=0 получаем  независимо от величины φ. Поэтому электромеханические характеристики будут представлять семейство прямых, выходящих из точки (ιк,0). При идеальном холостом ходе ι=0 и
независимо от величины φ. Поэтому электромеханические характеристики будут представлять семейство прямых, выходящих из точки (ιк,0). При идеальном холостом ходе ι=0 и
 (3.68)
(3.68)
т.е. относительная скорость идеального холостого хода υ0 изменяется обратно пропорционально относительному магнитному потоку φ (рис. 3.19).

Момент короткого замыкания μк будет уменьшаться пропорционально φ
 (3.69)
(3.69)
а скорость υ будет возрастать (рис. 3.20).

Рабочими являются выделенные участки механических характеристик, на которых при данном значении μρ скорость υ при уменьшении φ возрастает, т.е.
 (3.70)
(3.70)
или 
 (3.71)
(3.71)
а момент двигателя должен быть
 (3.72)
(3.72)
Значение магнитного потока, при котором скорость достигает максимальной величины, определяется условием
 , (3.73)
, (3.73)
использование которого в (3.57) позволяет найти
 (3.74)
(3.74)
и  (3.75)
(3.75)
При  скорость υ начинает уменьшаться и достигает нулевого значения при
скорость υ начинает уменьшаться и достигает нулевого значения при 
 (3.76)
(3.76)
Следовательно
 (3.77)
(3.77)
Зависимость  при μρ=const, которая называется регулировочной характеристикой ДПТ НВ, приведена на рис. 3.21. При заданной нагрузке μ (если ρ=const) с ослаблением магнитного потока φ скорость υ двигателя повышается до предельной υm, а затем начинает уменьшаться. В промышленных электроприводах используются только правые (по отношению к максимуму υm) части регулировочных характеристик. Левые (по отношению υm) части регулировочных характеристик ДПТ НВ, соответствующие большим значениям μρ, иногда используются в маломощных (приборных) электроприводах для управления двигателем с помощью тока возбуждения (рис. 3.22). С помощью регулятора тока возбуждения РТВ регулируется скорость ДПТ НВ от нуля (φ0=μρ) до максимальной υm (
при μρ=const, которая называется регулировочной характеристикой ДПТ НВ, приведена на рис. 3.21. При заданной нагрузке μ (если ρ=const) с ослаблением магнитного потока φ скорость υ двигателя повышается до предельной υm, а затем начинает уменьшаться. В промышленных электроприводах используются только правые (по отношению к максимуму υm) части регулировочных характеристик. Левые (по отношению υm) части регулировочных характеристик ДПТ НВ, соответствующие большим значениям μρ, иногда используются в маломощных (приборных) электроприводах для управления двигателем с помощью тока возбуждения (рис. 3.22). С помощью регулятора тока возбуждения РТВ регулируется скорость ДПТ НВ от нуля (φ0=μρ) до максимальной υm ( ).
).
|
|
Для ограничения тока якоря IЯ в допустимых пределах при нулевой скорости используется достаточно большое добавочное сопротивление RД.

42. ТОРМОЗНЫЕ РЕЖИМЫ РАБОТЫ ДПТ НВ
В ДПТ НВ можно реализовать три тормозных режима: рекуперативное торможение, торможение противовключением и динамическое торможение.
Рекуперативное торможение возникает при скорости ротора ω выше скорости идеального холостого хода ω0. в этом случае ЭДС Е больше приложенного к якорю напряжения U, в связи с чем ток изменяет направление, и двигатель отдает энергию в сеть. В режиме рекуперативного торможения направление тока совпадает с направлением ЭДС, что характерно для любого тормозного режима.
Из уравнения электрического равновесия
U=E+IЯRЯ (3.78)
Определяем ток якоря
 (3.79)
(3.79)
и находим электромагнитный момент
M=C(-IЯ)<0
и уравнение механической характеристики в этом режиме (рис. 3. 23)

 (3.80)
(3.80)
Из-за того, что Е > U уравнение электрического равновесия принимает вид
E=U+IЯRЯ (3.81)
Умножив обе части (3.81) на IЯ, получим уравнение для мощностей
PЭМ=РЭЛ+ΔР, (3.82)
где PЭМ=EIЯ – электромагнитная мощность,
РЭЛ=UIЯ – электрическая мощность,
ΔР=I2ЯRЯ – потери мощности в якорной цепи.
Уравнение (3.82) показывает, что в режиме рекуперативного торможения механическая энергия, поступающая на вал двигателя, преобразуется в электрическую за вычетом потерь возвращается в сеть. В установившемся режиме рекуперативное торможение возможно в ограниченном классе электроприводов (подъемники, электротранспорт) при действии активного статического момента МС, когда ω>ω0 (рис. 3.23).
Торможение противовключением происходит тогда, когда двигатель, включенный на вращение в одном направлении, под действием внешних сил или сил инерции вращается в противоположном направлении. В режиме противовключения изменяет знак скорость двигателя при сохранении знака электромагнитного момента или изменяет знак момент при сохранении знака скорости.
|
|
Первый случай имеет место при воздействии активного статического момента, который превышает момент короткого замыкания на данной характеристике (рис. 3.24).

После точки С (ω=0), где МК<MC, скорость и ЭДС изменяют знак, т.е. ω<0, E=Cω<0.
Уравнение равновесия напряжений принимает вид
U-(-E)=IЯRЯ, U+E= IЯRЯ, (3.83)
где RЯ=RЯ,0+RД (3.84)
Как видно из (3.86), в этом режиме ЭДС Е действует согласно с напряжением U и ток в якоре
 (3.85)
(3.85)
может достичь больших значений (до 40 IНОМ), если его не ограничивать добавочным сопротивлением RД.
Как в режиме рекуперативного торможения, направление тока совпадает с направлением ЭДМ, что указывает на тормозной режим. Механическая характеристика представляется формулой(3.41), но в данном режиме

поэтому ω<0. Скольжение

Второй случай режима противовключения возникает при реверсировании двигателя за счет перемены полярности подводимого к якорю напряжения с помощью контактов "Вперед" (В) и "Назад" (Н) – рис.3.25.

При изменении полярности подводимого к якорю напряжения ток двигателя изменяет свое направление, изменяется соответственно и знак момента, который становится тормозным по отношении к прежнему направлению движения (рис. 3.26).

Для ограничения тока и момента при реверсировании в якорную цепь вводится с помощью контакта У добавочное сопротивление RД. Электродвигатель будет затормаживаться по характеристике ВС. Уравнение равновесия напряжений в этом случае
-U=E+ IЯRЯ, (3.86)
-(U+E)=IЯRЯ
откуда ток якоря
 (3.87)
(3.87)
будет определяться суммой напряжения и ЭДС, как и в первом случае.
Уравнение механической характеристики
 (3.88)
(3.88)
где 
В точке С механической характеристики (см. рис. 3.26) электродвигатель необходимо отключить от сети, иначе он изменит направление вращения и будет разгоняться по прямой СD (при реактивном статическом моменте до точки D и при активном статическом моменте до точки G). Таким образом, режим противовключения является первой фазой реверсирования.
Энергетические соотношения здесь такие же, как и для первого случая:
UIЯ+EIЯ=I2ЯRЯ, (3.89) РЭЛ+РЭМ=ΔР, (3.90)
т.е. при торможении противовключением сумма электрической РЭЛ и электромагнитной РЭМ мощностей превращается в мощность потерь ΔР в якорной цепи.
Динамическое торможение происходит, если вращающийся якорь электродвигателя отключается от сети и замыкается на внешнее сопротивление, а обмотка возбуждения оставляется подключенной к источнику (рис. 3.27).
|
|

В обмотке вращающегося по инерции якоря индуктируется ЭДС Е, под действием которой в замкнутой цепи якоря протекает ток IЯ. Направление тока якоря противоположно двигательному режиму. Ток якоря вычисляется по формуле
 (3.91) где RT – тормозное сопротивление.
(3.91) где RT – тормозное сопротивление.
В режиме динамического торможения U=0, поэтому ω0, что в соответствии с (3.40) и (3.41) определяет электромеханическую  (3.92)
(3.92)
и механическую  (3.93)
(3.93)
характеристики. Следовательно, в режиме динамического торможения линейные электромеханические и механические характеристики проходят через начало координат (рис. 3.28).

Из (3.93) следует, что динамическое торможение наиболее эффективно при больших скоростях. По мере уменьшения скорости уменьшается и тормозной момент. Максимальное значение тормозного момента будет при замыкании обмотки якоря накоротко (RT=0). Для ограничения броска тормозного тока (-IНАЧ) и момента (-MНАЧ) якорь электродвигателя замыкается на тормозное сопротивление RT, величина которого определяется по формуле
 (3.94)
(3.94)
Энергетические соотношения при динамическом торможении вытекают из уравнения электрического равновесия
-E=IЯRЯ, (3.95)
после умножения левой и правой части (3.95) на IЯ получаем
EIЯ=I2ЯRЯ, РЭМ=ΔР. (3.96)
Это значит, что при динамическом торможении электромагнитная мощность РЭМ превращается в потери ΔР в тормозном сопротивлении RT и собственном сопротивлении RЯ,0 обмотки якоря.
Динамическое торможение применяют для быстрой остановки электродвигателя, а также для получения низких посадочных скоростей (ωП≈0,1ωНОМ) при опускании тяжелых грузов в подъемных кранах. Преимущества динамического торможения состоят в простоте его реализации, надежности, плавности торможения, экономичности по сравнению с торможением противовключением. Недостатками динамического торможения являются: уменьшение тормозного момента пропорционально снижению скорости, исчезновение тормозного момента при отсутствии тока в обмотке возбуждения. С целью увеличения тормозного момента при снижении скорости используют двух- и трехступенчатое торможение (рис. 3.29). При реактивном статическом моменте торможение оканчивается в начале координат 0, а при активном – в точке G.

43. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДПТ ПВ В ОСЯХ Α–Β.
Обмотка возбуждения ДПТ ПВ включается последовательно с обмоткой якоря, ток в которой может быстро изменяться. Следовательно, может быстро изменяться и магнитный поток, наводя в полюсах и массивных частях станины вихревые токи, которые будут оказывать влияние на магнитный поток. Влияние вихревых токов в модели ДПТ ПВ учитывается в виде эквивалентного короткозамкнутого контура, имеющего единичный коэффициент связи с обмоткой возбуждения
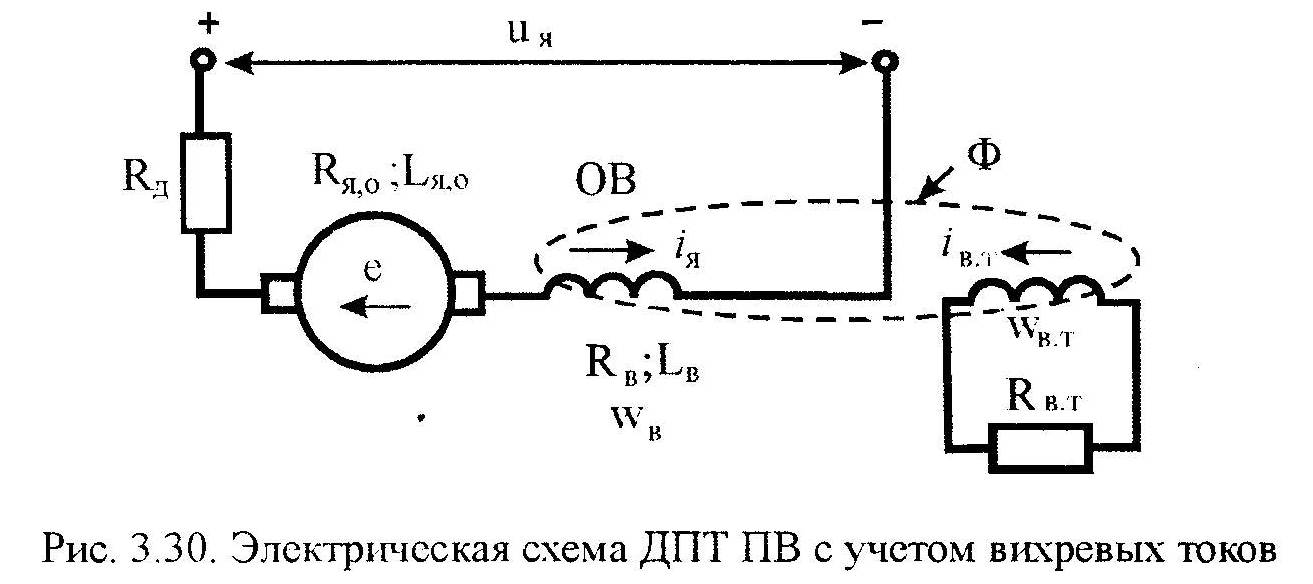
Уравнение для этой схемы ДПТ ПВ можно записать в виде

где RЯ=RЯ,0+RД+RВ – суммарное сопротивление якорной цепи,
LЯ=LЯ,0+LВ – суммарная индуктивность якорной цепи,
RВ, LВ, WВ – сопротивление, индуктивность и число витков обмотки возбуждения,
RЯ,0, LЯ,0 – собственное сопротивление и индуктивность обмотки якоря,
 ,
,  - сопротивление и число витков эквивалентной обмотки вихревых токов.
- сопротивление и число витков эквивалентной обмотки вихревых токов.
Магнитный поток Ф определяется результирующим действием тока якоря iЯ (он же и ток возбуждения) и вихревых токов iВ.Т в соответствии с кривой намагничивания:

Для дальнейших преобразований разделим все члены первого уравнения системы на RЯ, а второго – на  . В результате получим
. В результате получим
 где
где 

Кроме того,


где  - суммарная постоянная времени цепи возбуждения ДПТ ПВ.
- суммарная постоянная времени цепи возбуждения ДПТ ПВ.

Уравнение совместно с уравнениями представляют математическую модель ДПТ ПВ. Запишем уравнения и в операторной форме


|
|
|

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!