Общие сведения



 Arduino Mega (Рис.1,2) построена на микроконтроллере ATmega2560 (техническое описание). Плата имеет 54 цифровых входа/выходов (14 из которых могут использоваться как выходы ШИМ), 16 аналоговых входов,4 последовательных порта UART, кварцевый генератор 16 МГц, USB коннектор, разъем питания, разъем ICSP и кнопка перезагрузки. Для работы необходимо подключить платформу к компьютеру посредством кабеля USB или подать питание при помощи адаптера AC/DC, или аккумуляторной батареей. Arduino Mega 2560 совместима со всеми платами расширения, разработанными для платформ Unoили Duemilanove.
Arduino Mega (Рис.1,2) построена на микроконтроллере ATmega2560 (техническое описание). Плата имеет 54 цифровых входа/выходов (14 из которых могут использоваться как выходы ШИМ), 16 аналоговых входов,4 последовательных порта UART, кварцевый генератор 16 МГц, USB коннектор, разъем питания, разъем ICSP и кнопка перезагрузки. Для работы необходимо подключить платформу к компьютеру посредством кабеля USB или подать питание при помощи адаптера AC/DC, или аккумуляторной батареей. Arduino Mega 2560 совместима со всеми платами расширения, разработанными для платформ Unoили Duemilanove.
Краткие характеристики
| Микроконтроллер
| ATmega2560
|
| Рабочее напряжение
| 5В
|
| Входное напряжение (рекомендуемое)
| 7-12В
|
| Входное напряжение (предельное)
| 6-20В
|
| Цифровые Входы/Выходы
| 54 (14 из которых могут работать также как выходы ШИМ)
|
| Аналоговые входы
|
|
| Постоянный ток через вход/выход
| 40 mA
|
| Постоянный ток для вывода 3.3 В
| 50 mA
|
| Флеш-память
| 256 KB (из которых 8 КB используются для загрузчика)
|
| ОЗУ
| 8 KB
|
| Энергонезависимая память
| 4 KB
|
| Тактовая частота
| 16 MHz
|
Питание
Arduino Mega может получать питание как через подключение по USB, так и от внешнего источника питания. Источник питания выбирается автоматически.
Внешнее питание (не USB) может подаваться через преобразователь напряжения AC/DC (блок питания) или аккумуляторной батареей. Преобразователь напряжения подключается посредством разъема 2.1 мм с положительным полюсом на центральном контакте. Провода от батареи подключаются к выводам Gnd и Vin разъема питания (POWER).Платформа может работать при внешнем питании от 6 В до 20 В. При напряжении питания ниже 7 В, вывод 5V может выдавать менее 5 В, при этом платформа может работать нестабильно. При использовании напряжения выше 12 В регулятор напряжения может перегреться и повредить плату. Рекомендуемый диапазон от 7 В до 12 В.
Плата Mega2560, в отличие от предыдущих версий плат, не использует FTDI USB микроконтроллер. Для обмена данными по USB используется микроконтроллер Atmega8U2, запрограммированный как конвертер USB-to-serial.Выводы питания:VIN. Вход используется для подачи питания от внешнего источника (в отсутствие 5 В от разъема USB или другого регулируемого источника питания).Подача напряжения питания происходит через данный вывод. Если питание подается на разъем 2.1mm, то на этот вход можно запитаться 5V. Регулируемый источник напряжения, используемый для питания микроконтроллера и компонентов на плате.
Питание может подаваться от вывода VIN через регулятор напряжения, или от разъема USB, или другого регулируемого источника напряжения 5 В. Напряжение на выводе 3.3 В генерируемое микросхемой FTDI на платформе. Максимальное потребление тока 50 мА.
Память
Микроконтроллер ATmega2560 имеет: 256 кБ флеш-памяти для хранения кода программы (4 кБ используется для хранения загрузчика), 8 кБ ОЗУ и 4 Кб EEPROM (которая читается и записывается с помощью библиотеки EEPROM).
Входы и Выходы
Каждый из 54 цифровых выводов Mega, используя функции pinMode(), digitalWrite(), и digitalRead(), может настраиваться как вход или выход. Выводы работают при напряжении 5 В. Каждый вывод имеет нагрузочный резистор (стандартно отключен) 20-50 кОм и может пропускать до 40 мА. Некоторые выводы имеют особые функции:Последовательная шина: 0 (RX) и 1 (TX); Последовательная шина 1: 19 (RX) и 18 (TX); Последовательная шина 2: 17 (RX) и 16 (TX); Последовательная шина 3: 15 (RX) и 14 (TX). Выводы используются для получения (RX) и передачи (TX) данных TTL. Выводы 0 и 1 подключены к соответствующим выводам микросхемы последовательной шины ATmega8U2.Внешнее прерывание: 2 (прерывание 0), 3 (прерывание 1), 18 (прерывание 5), 19 (прерывание 4), 20 (прерывание 3), и 21 (прерывание 2). Данные выводы могут быть сконфигурированы на вызов прерывания либо на младшем значении, либо на переднем или заднем фронте, или при изменении значения. Подробная информация находится в описании функции attachInterrupt().PWM: 2 до 13 и 44-46. Любой из выводов обеспечивает ШИМ с разрешением 8 бит при помощи функции analogWrite().SPI: 50 (MISO), 51 (MOSI), 52 (SCK), 53 (SS). Посредством данных выводов осуществляется связь SPI, например, используя библиотеку SPI. Также выводы SPI могут быть выведены на блоке ICSP, который совместим с платформами Uno, Duemilanove и Diecimila.LED: 13. Встроенный светодиод, подключенный к цифровому выводу 13. Если значение на выводе имеет высокий потенциал, то светодиод горит.I2C: 20 (SDA) и 21 (SCL). Посредством выводов осуществляется связь I2C (TWI). Для создания используется библиотека Wire (информация на сайте Wiring). Расположение выводов на платформе Mega не соответствует расположению Duemilanove или Diecimila.На платформе Mega2560 имеется 16 аналоговых входов, каждый разрешением 10 бит (т.е. может принимать 1024 различных значения). Стандартно выводы имеют диапазон измерения до 5 В относительно земли, тем не менее имеется возможность изменить верхний предел посредством вывода AREF и функции analogReference().
Дополнительная пара выводов платформы:AREF. Опорное напряжение для аналоговых входов. Используется с функцией analogReference().Низкий уровень сигнала на выводе перезагружает микроконтроллер. Обычно применяется для подключения кнопки перезагрузки на плате расширения, закрывающей доступ к кнопке на самой плате Arduino.
Связь
На платформе Arduino Mega2560 установлено несколько устройств для осуществления связи с компьютером, другими устройствами Arduino или микроконтроллерами. ATmega2560 поддерживает 4 порта последовательной передачи данных UART для TTL. Установленная на плате микросхема ATmega8U2 направляет один из интерфейсов через USB, предоставляя виртуальный COM порт программам на компьютере (машинам под управлением Windows для корректной работы с виртуальным COM портом необходим.inf файл, системы на базе OSX и Линукс, автоматически распознаю COM порт). Утилита мониторинга последовательной шины (Serial Monitor) среды разработки Arduino позволяет посылать и получать текстовые данные при подключении к платформе. Светодиоды RX и TX на платформе будут мигать при передаче данных через микросхему ATmega8U2 и USB подключение (но не при использовании последовательной передачи через выводы 0 и 1).Библиотекой SoftwareSerial возможно создать последовательную передачу данных через любой из цифровых выводов Mega2560.ATmega2560 поддерживает интерфейсы I2C (TWI) и SPI. В Arduino включена библиотека Wire для удобства использования шины I2C. Более подробная информация находится на сайте Wiring. Для связи по SPI, используется библиотека SPI.
Программирование
Платформа программируется посредством среды разработки Arduino. Подробная информация находится в справочнике и инструкциях.Микроконтроллер ATmega2560 поставляется с записанным загрузчиком, облегчающим запись новых программ без использования внешних программаторов. Связь осуществляется оригинальным протоколом STK500.
Имеется возможность не использовать загрузчик и запрограммировать микроконтроллер через выводы блока ICSP (внутрисхемное программирование). Подробная информация находится в данной инструкции.
Код прошивки для контроллера ATmega8U2 доступен для свободного скачивания. Контроллер ATmega8U2 имеет собственный DFU загрузчик, который может быть активирован замыканием джампера на обратной стороне платы (рядом с картой Италии) и перезагрузкой контроллера. Для записи новой прошивки возможно использовать Atmel's FLIP (под Windows) или DFU программатор (на Mac OS X или Linux).Также можно переписать прошивку внешним программатором, используя ISP вход.
Автоматическая (программная) перезагрузка
Mega разработана таким образом, чтобы перед записью нового кода перезагрузка осуществлялась самой программой, а не нажатием кнопки на платформе. Одна из линий ATmega8U2, управляющих потоком данных (DTR), подключена к выводу перезагрузки микроконтроллера ATmega2560 через конденсатор 100 нФ. Активация данной линии, т.е. подача сигнала низкого уровня, перезагружает микроконтроллер. Программа Arduino, используя данную функцию, загружает код одним нажатием кнопки Upload в самой среде программирования. Подача сигнала низкого уровня по линии DTR скоординирована с началом записи кода, что сокращает таймаут загрузчика.
Функция имеет еще одно применение. Перезагрузка Mega2560 происходит каждый раз при подключении к программе Arduino на компьютере с ОС Mac X или Linux (через USB). Следующие полсекунды после перезагрузки работает загрузчик. Во время программирования происходит задержка нескольких первых байтов кода во избежание получения платформой некорректных данных (всех, кроме кода новой программы). Если производится разовая отладка скетча, записанного в платформу, или ввод каких-либо других данных при первом запуске, необходимо убедиться, что программа на компьютере ожидает в течение секунды перед передачей данных.На Mega2560 имеется возможность отключить линию автоматической перезагрузки разрывом соответствующей линии. Контакты микросхем с обоих концов линии затем могут быть соединены с целью восстановления. Линия маркирована «RESET-EN». Отключить автоматическую перезагрузку также возможно подключив резистор 110 Ом между источником 5 В и данной линией.
Токовая защита разъема USB
В Arduino Mega2560 встроена перезагружаемая плавкая вставка, защищающая порт USB компьютера от токов короткого замыкания и сверхтоков. Хотя практически все компьютеры имеют подобную защиту, тем не менее, данный предохранитель обеспечивает дополнительный барьер. Предохранитель автоматически прерывает обмен данных при прохождении тока более 500 мА через USB порт.
Физические характеристики и совместимость с платами расширения
Длинна и ширина печатной платы Mega2560 составляют 10,2 и 5.3 см соответственно. Разъем USB и силовой разъем выходят за границы данных размеров. Три отверстия в плате позволяют закрепить ее на поверхности. Расстояние между цифровыми выводами 7 и 8 равняется 0,4 см, хотя между другими выводами оно составляет 0,25 см.Arduino Mega2560 совместима со всеми платами расширения, разработанными для платформ Uno, Duemilanove или Diecimila. Расположение выводов 0 – 13 (и примыкающих AREF и GND), аналоговых входов 0 – 5, силового разъема, блока ICSP, порта последовательной передачи UART (выводы 0 и 1) и внешнего прерывания 0 и 1 (выводы 2 и 3) на Mega соответствует расположению на вышеприведенных
платформах. Связь SPI может осуществляться через блок ICSP, как на платформах Duemilanove / Diecimila, так и на Mega2560. Однако расположение выводов (20 и 21) связи I2C на платформе Mega не соответствуют расположению тех же выводов (аналоговые входы 4 и 5) на Duemilanove / Diecimila.
Arduino Mega 2560
В основе платы Arduino Mega 2560 лежит микроконтроллер ATmega2560. На плате имеется 54 цифровых пина ввода/вывода, 15 из которых могут быть использованы как выходы ШИМ, 16 аналоговых входов, 4 аппаратных последовательных порта UART, кварцевый резонатор с частотой 16 МГц, порт USB, разъем питания, разъем ISCP (In Circuit Serial Programming, программирование в устройстве по последовательному протоколу) и кнопка сброса микроконтроллера. Для того, чтобы начать работу с этой платой необходимо просто подключить ее, используя интерфейс USB к компьютеру, или же просто подать питание от источника постоянного тока, в качестве которого может выступить и батарейка. Arduino Mega 2560 совместима с большинством плат расширения (шилдов), разработанных для Arduino UNO, Duemilanove или Diecimila.ArduinoMega 2560 заменила собой плату ArduinoMega. Mega 2560 отличается от всех предыдущих плат тем, что не использует аппаратные мосты USB-to-serial компании FTDI. Вместо этого, он имеет микроконтроллер ATmega16U2 (ATmega8U2 в версиях платы 1 и 2), запрограммированный для работы в качестве USB-to-serial преобразователя.
Во второй ревизии Mega2560 имеет резистор, подтягивающий линию 8U2 HWB на землю, что упрощает перевод в режим DFU. В ArduinoMega 2560 в ревизии 3 произведены следующие изменения:Цоколевка 1.0: добавлены пины SDA и SCL, расположенные рядом с выводам AREF и два других новых пина размещены рядом c выводом RESET. IOREF позволяет шилдам адаптироваться к напряжению, подаваемому с платы. В будущем шилды будут совместимы и с платами, основанными на микроконтроллерах AVR, работающими с напряжением 5 В, и с платой Arduino Due, работающей с напряжением 3.3 В.Усилена цепь RESET. Произведена замена ATmega 8U2 на 16U2.

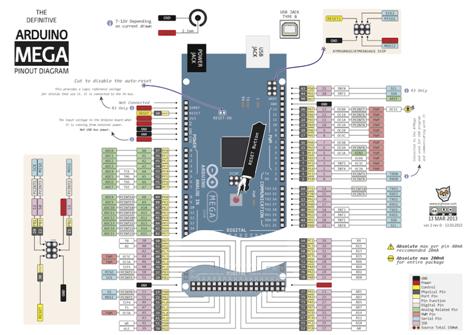
| Схема, datasheet, цоколевка
| |

Характеристики ArduinoMega 2560
| Микроконтроллер
| ATmega2560
|
| Рабочее напряжение
| 5 В
|
| Входное напряжение (рекомендовано)
| 7-12 В
|
| Входное напряжение (предельное)
| 6-20 В
|
| Цифровые входы/выходы
| 54 (из которых 15 могут работать как выходы ШИМ)
|
| Аналоговые входы
|
|
| Макс.ток на входе/выходе
| 40 мА
|
| Макс.ток для вывода 3.3 В
| 50 мА
|
| Флеш-память (Flash memory)
| 256 Кб из которых 8Кб используется загрузчиком
|
| ОЗУ (SRAM)
| 8 Кб
|
| Энергонезависимая память (EEPROM)
| 4 Кб
|
| Тактовая частота
| 16 МГц
|
Питание
Arduino Mega может получать питание от USB -порта или внешнего источника. Источник питания выбирается автоматически.Внешнее питание (не по USB) может подаваться от блока питания или батареи. Блок питания подключается к 2.1 мм разъему на плате, который имеет центральный плюсовой вывод. Батарейное питание можно подключать к выводам GND и VIN разъема питания POWER. Плата может работать от внешнего источника напряжения в диапазоне от 6 до 20 вольт. При напряжении источника питания менее 7 В, на 5 вольтовом выводе может быть меньше 5 В и плата может работать нестабильно. Если напряжение внешнего источника превышает 12 В, регулятор напряжения может перегреться и вывести плату из строя. Рекомендованный диапазон напряжения питания 7-12 вольт.
Выводы питания:
VIN. Входное напряжение платы Arduino при использовании внешнего источника (если отсутствует напряжение 5 вольт на USB -соединении или от другого источника питания). Можно подавать питание на этот вывод, или же, если питание подается на 2.1 мм разъем, то можно с этого вывода получить к питающему входному напряжению 5V. Напряжение на этих выводах регулируется встроенным в плату регулятором напряжения. Плата может быть запитана либо через 2.1 мм разъем питания (7-12 В), через USB -подключение (5 В), или же через вывод VIN (7-12 В) на плате. Подача питания через выводы 5 В или 3.3 В обходит регулятор и может привести к выходу платы из строя. Так делать не рекомендуется 3V3. Напряжение 3.3 вольта формируется при помощи встроенного в плату регулятора. Максимальный ток потребления не должен превышать 50 мА GND. Выводы земли IOREF. Этот вывод обеспечивает опорное напряжение, с которым работает микроконтроллер. Для правильной конфигурации внешних плат, можно считывать напряжение с этого вывода и выбирать соответствующий источник питания или включать преобразователи напряжений для работы с 5 В или 3.3 В.
Память
ATmega имеет 256 Кб флеш-памяти для хранения программного кода (из которых 8 Кб используется для загрузчика), 8 Кб ОЗУ, и 4 Кб энергонезависимой памяти (EEPROM может считываться и записываться при помощи библиотеки, которая так и называется — EEPROM).
Входы и выходы
Каждый из 54 цифровых пинов на Arduino Mega может работать в режиме входа или выхода, используя функции pinMode, digitalWrite и digitalRead. Выходы работают на 5 В. Каждый пин может отдать или принять максимум 40 мА и имеет внутренний подтягивающий резистор 20-50 кОм (отключен по умолчанию). Плюс к этому, некоторые выводы имеют специальные функции: Serial: 0 (RX) и 1 (TX); Serial 1: 19 (RX) и 18 (TX); Serial 2: 17 (RX) и 16
(TX); Serial 3: 15 (RX) и 14 (TX). Для отправки данных по последовательному порту с уровнями TTL -логики используется RX, для получения — TX. Пины 0 и 1 также подключены к соответствующим выводам микросхемы преобразователя USB-to-TTL ATmega16U2. Внешние прерывания: 2 (прерывание 0), 3 (прерывание 1), 18 (прерывание 5), 19 (прерывание 4), 20 (прерывание 3) и 21 (прерывание 2). Эти выводы могут быть установкой прерывания низким уровнем, по переднему или заднему фронту или перепадом PWM: со 2 по 13 и с 44 по 46. Обеспечивают выход 8-битного ШИМ-сигнала, используя функцию analogWrite. SPI: 50 (MISO), 51 (MOSI), 52 (SCK), 53 (SS). Эти пины поддерживают передачу данных по SPI, используя библиотеку SPI. Пины SPI также могут быть выведены на блок ISCP, который на физическом уровне совместим с Uno, Duemilanove и Diecimilia. LED: 13. Это встроенный в плату светодиод, который подключен к 13 выводу. При значении HIGH на выводе, светодиод включается, при низком — выключается. TWI (I2C): 20 (SDA) и 21 (SCL). Обеспечивает соединение по протоколу I2C, используя библиотеку Wire. Расположение этих выводов отличается на платах Duemilanove или Diecimila. Mega2560 имеет 16 аналоговых входов, каждый из которых дает 10 битное разрешение (1024 различных значений). По умолчанию, напряжение измеряется между землей и 5 вольтами, хотя возможно изменить верхний диапазон, используя вывод AREF и функцию analogReference. На плате имеется еще пара выводов AREF. Опорное напряжение для аналоговых входов. Используется с analogReference. RESET. Низкий уровень сигнала на этом входе перезагружает микроконтроллер. Обычно используется дополнительная кнопка сброса на шилдах, которые блокируют кнопку сброса на самой плате Arduino.
Связь
Arduino Mega 2560 имеет несколько различных возможностей для осуществления связи с другим компьютером, другой платой Arduino, или другим микроконтроллером. ATmega2560 имеет 4 аппаратных порта UART для соединения по последовательному порту с TTL -уровнями (5 вольт). ATmega16U2 (ATmega 8U2 на платах 1 и 2 ревизий) перенаправляет один из каналов через USB и предоставляет виртуальный COM -порт для ПО на компьютере (компьютерам, работающим под Windows требуется файл. inf, но компьютеры под Mac OS X и Linux распознают плату в виде COM -порта автоматически). Arduino IDE имеет монитор порта, который позволяет отправлять и получать на плату Arduino простые текстовые данные. Светодиоды RX и TX мигают, сигнализируя о передаче данных через микросхему ATmega8U2/ATmega16U2 и USB -соединение на компьютер (но не при пераче данных через последовательный порт, используя пины 0 и 1).Библиотека SoftwareSerial позволяет работать с подключением по последовательному порту для любых цифровых выводов Mega 2560. ATmega2560 также поддерживает соединение по протоколам I2C и SPI. Для упрощения использования обмена по протоколу I2C используется библиотека Wire, для соединения по SPI — библиотека с таким же названием SPI.
Программирование
Arduino Mega можно программировать, используя Arduino IDE. Микроконтроллер ATmega2560 на плате ArduinoMega поставляется с прошитым загрузчиком, который позволяет загружать новый код в микроконтроллер без использования внешнего аппаратного программатора. Загрузчик использует оригинальный протокол STK500 (заголовочные файлы C).Можно не использовать загрузчик и программировать микроконтроллер через выводы блока ISCP, используя Arduino ISP или аналогичный. Исходный код прошивки ATmega16U2 (или 8U2 в версиях плат 1 и 2) доступен для скачивания в репозитории Arduino. ATmega16U2/8U2 загружается, используя загрузчик DFU, который активируется следующим образом:На платах версии 1: замыкаем перемычку на обратной стороне платы (рядом с картой Италии) и перезагружаем 8U2.На платах версии 2 или более поздней: имеется резистор, подтягивающий линию 8U2/16U2 HWB к земле, что облегчает переход в режим DFU. Можно использовать ПО от Atmel под названием Flip (для Windows) или DFU программатор (Mac OS X и Linux). Также можно переписать прошивку внешним программатором, используя разъем ISP (перезаписав загрузчик DFU).
Автоматическая (программная перезагрузка)
Вместо того, чтобы физически нажимать клавишу сброса перед загрузкой, Arduino Mega2560 разработан таким образом, что позволяет программный сброс с подключенного компьютера. Одна из линий, управляющая потоком данных ATmega8U2 - линия DTR, подключена к линии сброса ATmega2560 через конденсатор емкостью 100 нФ. Активация этой линии, используя низкий уровень напряжения позволяет сбросить микросхему. Программное обеспечение Arduino использует эту возможность, позволяя загружать код простым нажатием на кнопку загрузки в среде Arduino. Подача сигнала низкого уровня синхронизировано с началом записи кода, что сокращает таймаут загрузчика. Это имеет еще одно применение. Когда Mega 2560 подключается к компьютеру под управлением Mac OS X или Linux, каждый раз происходит программная перезагрузка (через USB). Программа загрузчика на Mega 2560 выполняется примерно полсекунды. В процессе программирования происходит задержка нескольких первых байтов кода, чтобы избежать получение некорректных данных (всех, кроме кода новой программы). Если производится разовая отладка скетча, записанного в платформу, или ввод каких-либо других данных при первом запуске, необходимо убедиться, что программа на компьютере перед передачей данных ожидает в течение секунды. На Mega2560 имеется возможность отключить линию автоматической перезагрузки разрывом соответствующей линии.
Чтобы восстановить линию, необходимо опять соединенить контакт на разрыве. Линия маркирована как «RESET-EN». Отключить автоматическую перезагрузку также возможно подключив резистор 110 Ом 5 В и данной линией.
Защита USB от перегрузки по току
Arduino Mega 2560 имеет самовосстанавливающийся предохранитель, который защищает порты USB вашего компьютера от коротких замыканий и перегрузки по току. Хотя большинство компьютеров обеспечивают свою собственную внутреннюю защиту, предохранитель обеспечивает дополнительный уровень защиты. При токе потребления через USB более чем 500 мА, предохранитель автоматически разрывает соединение, пока короткое замыкание или перегрузка не будут устранены.
Физические характеристики и совместимость с платами расширения
Длина и ширина печатной платы Mega2560 составляют 10,2 и 5.3 см соответственно. Разъем USB и силовой разъем выходят за границы данных размеров. Три отверстия в плате позволяют закрепить ее на поверхности. Расстояние между цифровыми выводами 7 и 8 равняется 0,4 см, хотя между другими выводами оно составляет 0,25 см. Arduino Mega2560 совместима со всеми платами расширения, разработанными для платформ Uno, Duemilanove или Diecimila. Расположение выводов 0 – 13 (и примыкающих AREF и GND), аналоговых входов 0 – 5, силового разъема, блока ICSP, порта последовательной передачи UART (выводы 0 и 1) и внешнего прерывания 0 и 1 (выводы 2 и 3) на Mega соответствует расположению на вышеприведенных платформах. Связь SPI может осуществляться через блок ICSP, как на платформах Duemilanove/Diecimila, так и на Mega2560. Однако расположение выводов (20 и 21) связи I2C на платформе Mega не соответствуют расположению тех же выводов (аналоговые входы 4 и 5) на Duemilanove/Diecimila.
СЕРВОДРАЙВЕРPCA9685

 PCA9685(Рис.1) – это 16-ти канальный 12-разрядный контроллер. Частота ШИМ настраивается в пределах от 24 до 1526 Гц. Хотя на плате от Adafruit написано от 40 до 1000 Гц. С помощью ШИМ контроллера можно управлять яркостью светодиодов, сервоприводами, и другими устройствами, где в качестве управляющего сигналы применяется ШИМ сигнал.Контроллер управляется по шине I2C. На этой плате есть две группы разъемов для шины I2C с двух сторон.
PCA9685(Рис.1) – это 16-ти канальный 12-разрядный контроллер. Частота ШИМ настраивается в пределах от 24 до 1526 Гц. Хотя на плате от Adafruit написано от 40 до 1000 Гц. С помощью ШИМ контроллера можно управлять яркостью светодиодов, сервоприводами, и другими устройствами, где в качестве управляющего сигналы применяется ШИМ сигнал.Контроллер управляется по шине I2C. На этой плате есть две группы разъемов для шины I2C с двух сторон.
Что позволяет подключать к шине несколько плат последовательно или подключать другие устройства к шине I2C. Большинство модулей имеет только одну группу контактов и иногда приходиться делать разветвители. Поэтому если 16 каналов Вам мало можнопоследовательно включить несколько таких плат, установив перемычками на каждую свой адрес.Питание контроллера и выходов ШИМ каналов разделено и может быть от 3 до 5 вольт. Для ШИМ каналов допускается максимальное напряжение 6 Вольт. Питание для ШИМ каналов можно подавать на штырьки (V+) или через клему. На плате есть место для фильтрующегоконденсатора,который в этом комплекте не шел, но я рекомендую его впаять. При больших нагрузках, питание может быть не стабильным, что может отрицательно сказываться на работе управляемых устройств. Емкость конденсатора не указана. Я выбрал наибольший, который поместился и не мешал монтажу платы.ШИМ контроллер приобретался специально для управления сервоприводами и именно о применении ШИМ для управления сервами и пойдет дальше речь. Сервоприводы, как Вы поняли, управляются ШИМ сигналомФорма сигнала для управления сервой имеет форму, изображенную на рисунке. Частота 50 Герц. Минимальная длительность импульса 1 мс. Максимальная длительность 2 мс. т.е. скважность ШИМ-а для управления сервами никогда не должна быть 0% и никогда не будет 100%.Весь диапазон изменений сигнала лежит на участке, отмеченном красной стрелкой. Т.е. Вам никак не получится использовать все 4096 шагов. В этот промежуток помещается всего 205 шагов. Т.е. Серва может занять всего 205 положений, а не 4096. Поэтому 12-разрядный ШИМ контроллер это совсем не много как могло показаться сразу.Соответственно один шаг будет составлять примерно 0,49 % от всего диапазона сервопривода. Например, если Ваша серва имеет максимальный угол поворота 90 градусов, то изменение скважности ШИМ один шаг – это 0,44 градуса.Для этого сервоконтроллера, я написал свою библиотеку, хотя в интернете можно найти массу примеров, но все же я не нашел того, что мне нужно применительно к сервоприводам.А именно: Установка положения сервопривода в процентах. Мне нужно задавать положение серв в процентах. Т.е. от 0 до 100%. А также от -100% до 100% если механизм имеет среднее положение и должен отклоняться в обе стороны.
Реверс
Реверс необходим для изменения направления работы сервопривода. Например, если в исполнительном устройстве сервопривод перевернуть, то это свойство избавит от необходимости что-то менять в кое программы. Достаточно будет только изменить свойство канала.
Настройка диапазона
Иногда требуется ограничить или расширить диапазон поворота сервоприводов. Например, серва может поворачиваться на угол 60 градусов, но для вашего устройства это много, вы хотите ограничить, скажем, до 45 градусов.
А иногда сделать ограничения только в одну сторону. Кстати, диапазон поворота сервы можно не только сузить, но и немного расширить. Расширить диапазон сервы до 120% процентов можно без проблем. Дальше – на свой страх и риск.Триммирование – установка сервоприводов в определенное начальное положение, которое приведет исполнительный механизм в нулевое положение.
Триммирование всегда приходиться делать, чтобы нивелировать механические погрешности при сборке конечного изделия.






