Расчет механизмов передвижения кранов мостового типа заключается в подборе и расчете ходовых колес, определении сопротивлений передвижению, выборе и проверке двигателей, редукторов, валов, муфт и тормозов.
Кинематические схемы привода механизмов передвижения мостовых кранов могут быть (рис. 2.10): а) с центральным приводом и тихоходным валом; б) с центральным приводом и быстроходным валом; в) раздельным приводом.
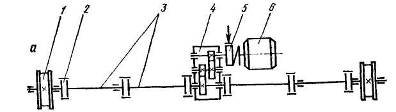

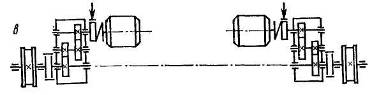
Рис. 2.10. Основные схемы привода механизмов передвижения мостовых кранов:
а — с центральным приводом и тихоходным валом; б — с центральным приводом и быстроходным валом; в — с раздельным приводом; 1 — ходовое колесо; 2 — муфта; 3 — вал промежуточный; 4 — редуктор; 5 — тормоз; 6 — электродвигатель
Табл. 2.10. Расчетные уклоны постоянного пути кранов
| Тип машины
| Уклон пути
|
| Мостовые краны
| 0,001
|
| Тележки мостовых кранов
| 0,002
|
| Портальные краны
| 0,003
|
| Тали
| 0,001
|
| Козловые краны
| 0,003
|
| Башенные краны
| 0,005
|
Общее сопротивление (Н) передвижению крана (тележки) от статических нагрузок
| F пер = F тр + F укл + F в,
| (2.39)
|
где F тр — сопротивление трения; F укл — сопротивление от уклона пути; F в — сопротивление от ветровой нагрузки (см. параграф 1.4), F в = F р [см. (1.26)].
Сопротивление трения при движении крана (тележки) по прямому рельсовому пути
F тр = k р(m + Q) g  , ,
| (2.40)
|
где Q — номинальная грузоподъемность, кг (см. параграф 1.1). Остальные обозначения см. в пояснениях к формулам (1.81) и (1.82).
Сопротивление от уклона пути
| F укл =(m + Q) g sin a,
| (2.41)
|
где a — угол наклона пути; sin a = tg a — уклон пути (табл. 2.10).
Статическая мощность двигателя (кВт), необходимая для привода механизма передвижения крана (тележки)
P с =  , ,
| (2.42)
|
где u пер — номинальная скорость передвижения, м/с; h— КПД механизма (см. табл. 1.18).
Номинальная мощность двигателя должна быть равна или несколько больше статической мощности.
Выбранный двигатель проверяется по ускорению при пуске
| а = u пер / t п £ а max,
| (2.43)
|
где t п — время пуска (разгона) механизма, с; а max — максимально допустимое ускорение [см. (1.81)].
Если для соблюдения условия a £ а max принимается двигатель мощностью Рдв < Рс, он должен быть проверен по нагреву (см. параграф 1.7).
Проверка запаса сцепления при пуске производится для случая работы крана (тележки) без груза по условию
k j =  , ,
| (2.44)
|
где F пp — суммарная нагрузка на приводные ходовые колеса (без груза), Н;  — полное сопротивление передвижению без груза, Н. Остальные обозначения см. в пояснениях к формулам (1.81)…(1.82).
— полное сопротивление передвижению без груза, Н. Остальные обозначения см. в пояснениях к формулам (1.81)…(1.82).
Суммарная нагрузка на приводные колеса, согласно рис. 2.11,
F А и F В — см. формулы (2.52) и (2.53) при Q = 0.
Приближенно можно принимать
При раздельном приводе механизма передвижения мостовых кранов следует проверить запас сцепления при пуске для аварийного случая (при работе только одного привода и расположении тележки без груза у неработающего привода). При этом
k j =  , ,
| (2.45)
|
где  — суммарная нагрузка на приводные колеса со стороны работающего привода, Н.
— суммарная нагрузка на приводные колеса со стороны работающего привода, Н.
Более высокий запас сцепления будет при ускорениях (замедлениях), принсдепных в табл. 1.26. При этом должны быть обеспечены соответствующие характеристики привода (мощность двигателя, скорость передвижения, число приводных колес, момент тормоза и др.).
Момент статических сопротивлений на валу тормоза механизма передвижения (Н·м) при неблагоприятном сочетании нагрузок во время торможения
где Т  — момент сил трения при торможении, Н·м,
— момент сил трения при торможении, Н·м,
Т =  , ,
| (2.47)
|
 — сопротивление трения ходовых колес при торможении, Н:
— сопротивление трения ходовых колес при торможении, Н:
| = mg ,
| (2.48)
|
Т  — момент сопротивления движению от уклона пути, Н·м:
— момент сопротивления движению от уклона пути, Н·м:
Т = mg  , ,
| (2.49)
|
где  — сопротивление от уклона пути при торможении:
— сопротивление от уклона пути при торможении:
| = mg sin a,
| (2.50)
|
Т  — момент от ветровой нагрузки, Н·м:
— момент от ветровой нагрузки, Н·м:
Т =  , ,
| (2.51)
|
hт — КПД механизма передвижения при торможении; и т — общее передаточное число между валом тормоза и ходовыми колесами.
Расчетный тормозной момент определяется по формуле (1.79).
Опорные нагрузки на ходовые колеса кранов мостового типа, согласно рис. 2.11:
F А =  + m мex g + m мex g  + m каб g + m каб g  + F A1 + F A1  +
+ F A3 +
+ F A3  ; ;
|
(2.52)
|
F В = + m мex g  + m каб g + m каб g  + F A1 + F A1  +
+ F A3 +
+ F A3  ; ;
|
(2.53)
|
F C = +  + F A2 + F A4 + F A2 + F A4  +
+ +
+ 
|
(2.54)
|
F D = + + F A2 + F A4  ; ;
| (2.55)
|
Наибольшая нагрузка на ходовые колеса будет при L 1 = 0 и при L 1 = L – L 4.
Опорные нагрузки на ходовые колеса тележки мостового крана, согласно рис. 2.11:
F А1 = (m т + Q) g   -(F -(F  + F + F  ) )  ; ;
| (2.56)
|
F А2 = (m т + Q) g  +(F + F ) ; +(F + F ) ;
| (2.57)
|
F А3 = (m т + Q) g  -(F + F ) ; -(F + F ) ;
| (2.58)
|
F А4 = (m т + Q) g  +(F + F ) ; +(F + F ) ;
| (2.59)
|
В формулах (2.52)...(2.59): Q — номинальная грузоподъемность крана, кг; m м, m т, m тp, m мех, m каб — масса соответственно моста, тележки, тролеев на мосту, привода механизма передвижения, кабины с аппаратурой, кг;  — ветровая нагрузка на кран в рабочем состоянии, воспринимаемая конструкцией крана (см. параграф 1.3), Н:
— ветровая нагрузка на кран в рабочем состоянии, воспринимаемая конструкцией крана (см. параграф 1.3), Н:  — горизонтальная инерционная нагрузка на кран от его веса, Н; F — ветровая нагрузка на кран в рабочем состоянии, воспринимаемая грузом, Н; F — горизонтальная инерционная нагрузка на кран от груза, Н;
— горизонтальная инерционная нагрузка на кран от его веса, Н; F — ветровая нагрузка на кран в рабочем состоянии, воспринимаемая грузом, Н; F — горизонтальная инерционная нагрузка на кран от груза, Н;  ,
,  — ордината точки приложения нагрузки соответственно и относительно головки подкранового рельса, м;
— ордината точки приложения нагрузки соответственно и относительно головки подкранового рельса, м;  — ордината оси барабана относительно подтележечного рельса, м.
— ордината оси барабана относительно подтележечного рельса, м.

Рис. 2.11. Расчетная схема для определения опорных нагрузок ходовых колес моста и тележки мостового крана
Опорные нагрузки на ходовые колеса рельсоповоротных кранов переменны и зависят не только от действующих нагрузок, но и от положения поворотной части крана относительно его неповоротной части.
Согласно рис. 2.12, опорные нагрузки:
F А =  + F в + F в  + М + М  - М - М  ; ;
| (2.60)
|
| F В = + F в - М - М ;
| (2.61)
|
| F С = + F в + М + М ;
| (2.62)
|
| F D = + F в - М + М ;
| (2.63)
|
где m н — масса неповоротной части, кг; F B — вертикальная составляющая равнодействующей всех сил, действующих на поворотную часть, Н; х 0 — расстояние от силы F B, до центра симметрии неповоротной части, м; a — угол между радиусом R и продольной осью крана, град; М — сумма моментов сил F B и F Г, действующих на неповоротную часть, Н·м; M = F B R + F Г H; R — расстояние от точки приложения силы F B до оси вращения крана, м; F Г— горизонтальная составляющая равнодействующей всех сил, действующих на поворотную часть, Н; L, l, Н — см. рис. 2.12.
Угол a, при котором данные опорные нагрузки будут наибольшими, определится после приравнивания нулю производной соответствующей нагрузки.
Максимальная нагрузка па наиболее нагруженную опору
где b — см. рис. 2.12.
Допустимые нагрузки на колеса приведены в табл. III.2.2. Расчет ходовых колес на контактную прочность см. параграф 2.4 и РТМ 24.090.28—77.
Примерная последовательность расчета механизма передвижения крана (тележки):
1) определяется масса крана (тележки) [см. параграф 1.2];
2) определяется общее сопротивление передвижению крана (тележки) [см. (2.39)];
3) определяется общая статическая мощность для привода механизма по (2.42);
4) составляется кинематическая схема механизма и выбирается двигатель (см. параграф III.3). В случае раздельного привода механизма (см. параграф 2.2) статическая мощность каждого двигателя (с учетом возможного неравномерного распределения нагрузки на каждый из них) принимается равной (0,5...0,6) Р с;
5) определяется частота вращения ходовых колес:
n к=  ; ;
|
|
6) определяется требуемое передаточное число привода согласно (2.36);
7) определяется расчетная мощность редуктора [см. (1.101) или (1.102)] и выбирается редуктор (см. параграф Ш.4);
8) определяются расчетные моменты соединительных муфт [см. (1.103)] и выбираются муфты по табл. III.5.1...111.5.9;
9) определяется фактическая скорость передвижения и проверяется соответствие ее данным табл. 1.2;
10) определяется максимально допустимое ускорение при пуске [см. (1.81)] по условию сцепления колес с рельсами;
11) определяется наименьшее допускаемое время пуска согласно (2.43).
12) проверяется двигатель на время пуска и на нагрев (см. параграф 1.7). Полученное время пуска должно соответствовать данным табл. 1.19;
13) проверяется запас сцепления ходовых колес с рельсами при пуске [см. (2.44) и (2.45)];
14) определяется максимальное допустимое замедление по (1.82) и проверяется его соответствие данным табл. 1.26; принимается меньшее значение;
15) определяется время торможения согласно (2.43) при ат ах = а  ;
;
16) определяется момент статических сопротивлений на тормозном валу при торможении без груза по (2.46);
17) определяется момент сил инерции при торможении без груза по (1.62);
18) по (1.79) определяется расчетный тормозной момент на валу тормоза при торможении без груза и выбирается тормоз по табл. Ш.5.11...III.5.14.
Определение тормозного момента для торможения крана (тележки) с грузом, при попутном ветре и при уклоне пути в сторону движения производится с учетом этих факторов. Во избежание резкого торможения при отсутствии последних может применяться двухступенчатое торможение. Подробнее см. [1] и РТМ 24.090.28—77;
19) определяется минимальная длина пути торможения S по табл. 1.26;
20) определяется фактическая длина пути торможения S ф согласно (1.75) и проверяется условие S ф ³ S;
21) производится расчет на прочность отдельных элементов механизма (ходовых колес и др.).



 = Т
= Т 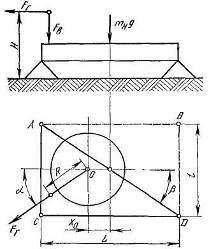
 - М
- М  ;
;
 + М
+ М  ;
;


 - М
- М  .
.
 = F B
= F B  ,
,


