Варианты заданий
Курсовая работа выполняется по вариантам. Номер варианта соответствует двум последним цифрам номера зачетной книжки студента.
|
| Последняя цифра номера зачетной книжки студента
|
| Предпоследняя цифра номера
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Министерство сельского хозяйства
ФГОУ ВПО
Тюменская государственная сельскохозяйственная академия
Кафедра «Сельскохозяйственные и мелиоративные машины»
методические указания
к курсовой работе «Разработка и расчёт машин
для скашивания трав и зерновых культур»
Тюмень – 2011
Методические указания разработаны к.т.н. доцентом
 .
.
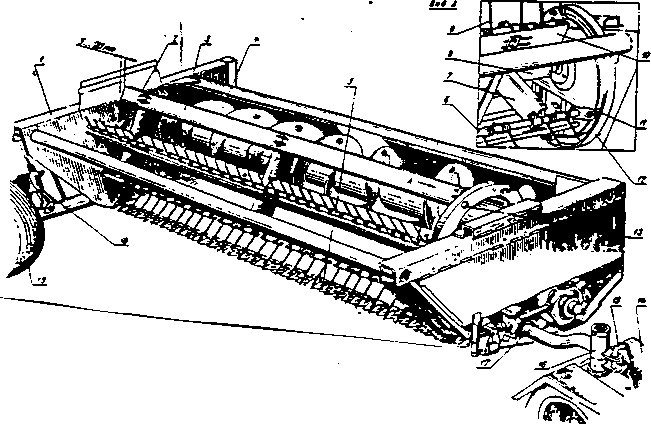
Рис. 3.4. Жатка для уборки трав: 1 – рама; 2 – опора мотовила; 3 – мотовило; 4 – шнек; 5 – режущий аппарат; 6 – граблина; 7 – держатель; 8 – вал мотовила; 9 – зуб пружинный; 10 – планка мотовила; 11 – ролик; 12 – дорожка направляющая; 13 – окно монтажное; 14 – тележка транспортная передняя; 15 – штырь; 16 – устройство поворотное; 17 – фиксатор; 18 – стяжка; 19 – тележка транспортная задняя.
Передаточное число:

Где  – число оборотов контрприводного вала.
– число оборотов контрприводного вала.
Для обеспечения вычислительного значения частоты вращения шнека определить число зубьев звёздочки  , закреплённой на валу шнека.
, закреплённой на валу шнека.
В этом подразделе даётся описание разработанной жатки и краткая техническая характеристика.
Техническая характеристика
Тип жатки
Ширина захвата, м
Рабочая скорость, км/ч
Уравновешивание
Копирование рельефа поля
Высота среза, см
Тип режущего аппарата
Ход ножа
Частота вращения кривошипного вала, 
Длина подвески ножа, мм
Тип мотовила
Диаметр мотовила, мм
Диаметр спирали шнека, мм
Диметр кожуха шнека, мм
Шаг спирали, мм
Частота вращения шнека,
Количество обслуживающего персонала
СОДЕРЖАНИЕ И ОБЪЁМ КУРСОВОЙ РАБОТЫ
Настоящие методические указания предназначены для студентов дневного и заочного отделения факультета механизации сельского хозяйства при выполнении ими курсовой работы по дисциплине «Сельскохозяйственные и мелиоративные машины». Эта работа закрепляет и углубляет знания по курсу, даёт возможность приобрести навыки выполнения инженерных расчётов и графических построений.
В соответствии с действующей программой курса работа должна содержать:
· Обзор и анализ существующих машин;
· Выбор и расчёт параметров рабочих органов;
· Расчёт их режимов работы и энергетических показателей;
· Настройку и регулировку машин.
Для технологических и других расчётов рекомендуется использовать ПЭВМ, что позволяет расширить содержание курсовой работы за счёт решения многовариантных задач.
Курсовая работа должна содержать:
1. Расчётно-пояснительную записку, выполненную на 20….30 страницах рукописного текста;
2. Графическую часть в количестве двух листов формата А1.
Оформление записки и графических материалов должно удовлетворять требованиям соответствующих стандартов.
1. Косилки
Задание на курсовую работу.
Тема: «Разработка и расчёт навесной однобрусной косилки»
Исходные данные
| Показатели
| Номер варианта
|
|
|
|
|
|
|
|
|
|
|
|
| Ширина захвата В, м
| 1,6
| 1,7
| 1,8
| 1,9
| 2,0
| 2,1
| 2,2
| 2,3
| 2,4
| 2,5
|
Рабочая скорость  , км/ч , км/ч
| 12,0
| 11,5
| 11,0
| 10,5
| 10,0
| 9,5
| 9,0
| 8,5
| 8,0
| 7,5
|
Содержание расчётно-пояснительной записки
1. Агротехнические требования к скашиванию трав.
2. Обзор и анализ существующих косилок с сегментно-пальцевым режущим аппаратом.
3. Разработка и расчёт косилки.
3.1. Выбор и расчёт параметров и режимов работы режущего аппарата и механизма привода ножа.
3.2. Определение кинематических показателей ножа.
3.3. Расчёт энергетических показателей механизма ножа.
3.4. Разработка конструктивно-кинематической (общей) схемы косилки.
4. Настройка и регулировка косилок.
Графический материал
1. Конструктивно-кинематическая схема косилки.
2. Графики скорости и ускорения ножа, а так же сил в зависимости от его перемещения.
Литература
1. Кленин Н.И., Сакун В.А. Сельскохозяйственные и мелиоративные машины.-М.:Колос, 1994-715 с.
2. Карпенко А.Н., Халанский В.М. Сельскохозяйственные машины.-М.: Агропромиздат, 1989-527 с.

Рис. 3.3. конструктивно-кинематическая схема жатки: 1 – режущий аппарат; 2 – мотовило; 3 – подвеска; 4 – шатун; 5 – вилка; 6 – вал колебательный; 7 – крестовина (шайба); 8 – цепная передача; 9 – клиноременная передача; 10 – контрпривод; 11 – шнек; 12 – приводной вал; 13 – клиноременная передача привода мотовила.
Шнек должен обеспечивать пропускную способность измельчителя комбайна (если жатка комбайна). Основными параметрами шнека являются диаметр спирали, диаметр кожуха и шаг спирали (Рис. 3.3.). Они принимаются в зависимости от пропускной способности измельчителя:  = 550 … 650 мм,
= 550 … 650 мм,  = 250 … 350 мм,
= 250 … 350 мм,  = 500 … 600 мм.
= 500 … 600 мм.
Частота вращения шнека:

где  – пропускная (транспортирующая) способность спиральной части шнека, кг/с;
– пропускная (транспортирующая) способность спиральной части шнека, кг/с;
 = π/2 – угол транспортирующей части шнека;
= π/2 – угол транспортирующей части шнека;
 =0,3 – коэффициент, учитывающий заполнение рабочего пространства шнека и скорость перемещения травы;
=0,3 – коэффициент, учитывающий заполнение рабочего пространства шнека и скорость перемещения травы;
 = 50 … 60 кг/
= 50 … 60 кг/  - плотность травяной массы поступающей на шнек.
- плотность травяной массы поступающей на шнек.
Значение должно быть больше расчётной подачи травы на левую или правую часть шнека  , то есть = (1,3 … 1,5)*
, то есть = (1,3 … 1,5)*  .
.
Расчётная подача определяется по пропускной способности измельчителя
 =
= 
Например, техническая пропускная способность измельчителя комбайна КСК-100 на уборке травы составляет 10 кг/с (36 т/ч).
Разработка схемы жатки.
Используя примерную конструктивно-кинематическую схему (Рис. 3.3.), общий вид (Рис. 3.4.) и жатку – прототип составить схему разрабатываемой жатки.
Привод рабочих органов фронтальных жаток, навешиваемых на самоходный измельчитель и другое энергосредство осуществляется через карданную передачу и контрпривод 10 (Рис. 3.3.). Для обеспечения расчётного значения частоты вращения кривошипного вала определяется диаметр  шкива, закреплённого на этом валу:
шкива, закреплённого на этом валу:
 = i∙
= i∙ 
Где i – передаточное число клиноременной передачи;
 - диаметр шкива контрприводного вала.
- диаметр шкива контрприводного вала.
Разработка и расчёт косилки
Разработке подлежит косилка с боковым расположением режущего аппарата (бруса), с монтажом её на заднюю навеску трактора и приводом от ВОМ (прототип-косилка КС-2, 1 Б).
Выбор и расчёт параметров
И режима работы шнека.

Рис. 3.2. Диаграмма движения режущего аппарата, отгиба стеблей и высоты стерни.
Считая технологической скоростью резания среднюю скорость ножа, можно определить по зависимости:
 =
=  =
=  ,
,
где S – ход ножа, м.
Если  < 1,8 м/с, то необходимо уменьшить подачу и снова вычислить частоту вращения кривошипа.
< 1,8 м/с, то необходимо уменьшить подачу и снова вычислить частоту вращения кривошипа.
Радиус кривошипа дезакциального КШМ:
r =  ∙
∙  ,
,
где  – величина дезакциала;
– величина дезакциала;
 – длина шатуна.
– длина шатуна.
Косилки с задней навеской имеют = 300 ….. 400 м.
При расположении кривошипного вала на линии оси трактора, ширине колеи трактора 1400 мм, ширине шин задних колёс до 420 мм и указанном значении дезакциала длина шатуна должна соответствовать = 950 … 1000 мм.
Определение энергетических
Показателей механизма ножа
Расчёту подлежат силы, действующие на нож, работа сил и мощность движущей силы, мощность привода (Рис. 1.3.).
Силой производственного сопротивления является сила сопротивления срезу
 =
=  ,
,
где k – удельная работа среза травы, которая равна 0,02….. 0,03 Нм/  ;
;
 – площадь нагрузки сегмента, ;
– площадь нагрузки сегмента, ;
Z – число сегментов.
Площадь нагрузки – это площадь поля, с которой срезаются стебли одним сегментом за один ход ножа.
Площадь нагрузки
 =L∙
=L∙ 
Число сегментов
Z= 
Cила инерции ножа
 =
=  =
=  ∙
∙  ∙X,
∙X,
где  - масса ножа.
- масса ножа.
Масса одного метра (погонная масса) ножа составляет 2,0….2,1 кг.
Частота вращения кривошипа:
 =
=  ,
,
где - рабочая скорость жатки, м/с.
Средняя скорость ножа:
 =
=  ,
,
где S – ход ножа, м.
Средняя скорость ножа принимается за технологическую скорость резания и она должна быть не менее 1,8 м/с. Если скорость будет меньше допустимой, то нужно уменьшить подачу и снова определить частоту вращения кривошипа.
Принятые и вычисленные значения параметров и режимов работы свести в таблицу.
| Тип
аппарата
| Режим работы
| Параметры, мм
|
| L, см
| 
| S
| α
| 
| 
| R
|
|
|
|
|
|
|
|
|
|
Определение показателей
Работы режущего аппарата
Одним из основных технологических показателей, определяемых агротехническими требованиями, является высота стерни, которая зависит от регулировки и работы механизма копирования и работы режущего аппарата. Влияние на этот показатель рабочего процесса режущего аппарата связано с отгибом стеблей. Для изучения и определения величины отгиба строится диаграмма движения режущего аппарата, отгиба стеблей и высоты стерни (Рис. 3.2.). Построение её ведётся в следующем порядке.
Вычертить тонкими линиями сегмент в трёх положениях, а противорежущую пластинку (вкладыш) – в двух. Крайние левые и правые положения сегмент занимает на расстоянии хода ножа S, а передние – подачи L. Построить траекторию абсолютного движения точки сегмента. При помощи шаблона нанести такие траектории крайних точек лезвия сегмента – косинусоиды  - ,
- ,  - ,
- ,  - и провести траекторию движения крайних точек лезвия пластинок m – m и n – n. Отметить точки
- и провести траекторию движения крайних точек лезвия пластинок m – m и n – n. Отметить точки
32∙

Рис. 3.1. Схема качающейся шайбы (МКШ): 1 – нож; 2 – шатун; 3 – вилка; 4 – вал колебателя с вилкой; 5 – кривошип; 6 – крестовина (шайба); 7 – подвеска; Ο – точка пересечения осей.
Для дальнейших расчётов снять с серийного сегмента и вкладыша пальца основные размеры и занести их в таблицу (Рис. 1.1. в разделе «Косилки»).
Режим работы режущего аппарата определяется подачей и частотой вращения кривошипа (числом полных колебаний ножа).
Числовое значение подачи:
L=λ∙h
где h – высота рабочей части режущей пары (сегмент-вкладыш);
λ – показатель, определяющий нагрузку на лезвие сегмента.
λ = 1,8 … 2,0 – для современных режущих аппаратов жаток.
Сила трения ножа с деталями пальцевого бруса
F=  +
+  ,
,
где  - сила трения, обусловленная силой тяжести ножа;
- сила трения, обусловленная силой тяжести ножа;
 - сила трения, возникающая от силы нормального давления шатуна на головку ножа.
- сила трения, возникающая от силы нормального давления шатуна на головку ножа.
Первая сила трения
=f∙G,
где f – коэффициент трения, равный 0,26…..0,30;
G – сила тяжести ножа.
Вторая сила:
=f∙N,
где N – сила давления головки ножа на направляющую.
N=( +
+  + )∙tg λ,
+ )∙tg λ,
где λ – угол между шатуном и линией направления движения ножа.
Угол λ – величина переменная, но изменение его очень незначительно, так как радиус кривошипа очень мал в сравнении с длиной шатуна, поэтому можно принять его постоянным.
Среднее значение угла определяется из функции:
Sin λ =  ,
,
Составляющая  от силы инерции
от силы инерции  имеет сложный характер, так как сила изменяется по ходу ножа по величине и направлению.
имеет сложный характер, так как сила изменяется по ходу ножа по величине и направлению.
Эта составляющая
 = ∙ tgλ=
= ∙ tgλ=  ∙
∙  tg λ,
tg λ,
 = ∙f=f∙ ∙ tg λ.
= ∙f=f∙ ∙ tg λ.
Другие составляющие
 =f∙ ∙tg λ,
=f∙ ∙tg λ,
 =f∙ ∙ tg λ.
=f∙ ∙ tg λ.
Cила  очень мала, поэтому ей можно пренебречь.
очень мала, поэтому ей можно пренебречь.
Построить графики сил, действующих на нож, в зависимости от его перемещения (Рис. 1.4.).

Рис. 1.3. Схема дизакциального КШМ с приложенными к ножу силами.

Рис. 1.4. Графики сил в зависимости от перемещения ножа.
Работу сил тяжести и сил инерции звеньев КШМ при определении мощности движущей силы можно не учитывать, так как эти силы за время цикла (время хода ножа) меняют знак. Тогда
 =
=  =
=  +
+  +
+  +
+  .
.
Разработка и расчёт жатки
Жатки для скашивания трав
Задание на курсовую работу
Тема: «Разработка и расчёт жатки для скашивания трав»
Исходные данные
| Показатели
| Номер варианта
|
|
|
|
|
|
|
|
|
|
|
|
| Ширина захвата В, м
| 3,0
| 3,4
| 3,8
| 4,2
| 4,6
| 5,0
| 5,3
| 5,7
| 6,1
| 2,5
|
| Рабочая скорость V, км/ч
| 12,0
| 11,5
| 11,0
| 10,5
| 10,0
| 9,5
| 9,0
| 8,5
| 8,0
| 14,0
|
Содержание расчётно-пояснительной записки
1. Агротехнические требования к скашиванию трав.
2. Краткий обзор и анализ существующих жаток.
3. Разработка и расчёт жатки.
3.1. Выбор и расчет параметров и режимов работы режущего аппарата и механизма привода ножа.
3.2. Определение показателей работы режущего аппарата.
3.3. Выбор и расчёт параметров и режима работы шнека.
3.4. Разработка конструктивно-кинематической схемы жатки.
4. Настройка и регулировка жаток.
Графический материал
1. Конструктивно-кинематическая схема жатки.
2. Диаграмма движения режущего аппарата, отгиба стеблей и высоты стерни.
Литература
1. Кленин Н.И., Сакун В.А. Сельскохозяйственные и мелиоративные машины – М.:Колос, 1994 – 715 с.
2. Комплексная механизация кормопроизводства. Под редакцией Долгова И.А. – М:Агропромиздат, 1987.
Работа силы сопротивления срезу
= ∙  ,
,
где  - путь резания, определенный по графику (Рис. 1.2.).
- путь резания, определенный по графику (Рис. 1.2.).
Работа силы трения A  ∙S
∙S
Работа силы трения, обусловленная силой 
=f∙ ∙tg λ∙ .
Работа силы трения, обусловленная силой
=f∙tg λ∙  ∙
∙  ∙
∙  .
.
Мощность движущей силы (на кривошипном валу)
Рg=  =
=  ,
,
где  - мощность сил сопротивления;
- мощность сил сопротивления;
t=  - время цикла.
- время цикла.
Мощность, которую должен развивать ВОМ трактора (без учёта потерь на трение в подшипниках)
 =
=  .
.
где – К П Д клиноременной передачи.
Потребная мощность на работу косилки
 1,5 .
1,5 .
Разработка схемы косилки
Используя примерную конструктивно-кинематическую схему (Рис. 1.5.), косилку КС-2, 1Б, составить схему разрабатываемой косилки.

Рис. 1.5. Конструктивно-кинематическая схема косилки: 1 – режущий аппарат; 2 – кривошип; 3 – карданная передача; 4 – тяговая штанга; 5 – шатун; 6 – шпренгель; 7 – шарнир; 8 – внутренний башмак; 9 – полозок; 10 – наружный башмак; 11 – механизм регулирования давления полозков на почву; 12 – клиноременная передача; 13 – рама.
Для обеспечения расчётной частоты вращения кривошипа определить диаметр шкива верхнего вала:
 =
=  ,
,
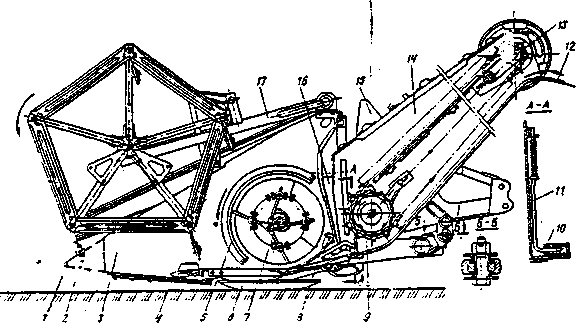
Рис. 2.6. Жатка комбайна1:
1 – носок делителя; 2 – планка мотовила; 3 – корпус жатки; 4 – режущий аппарат; 5 и 8 – козырьки; 6 – башмак; 7 – палец подбирающего механизма; 9 – наклонный (плавающий) транспортёр; 10 – пруток переходного щитка; 11 – штанга переходного щитка; 12 – фартук; 13 – ведущий вал наклонного транспортёра; 14 – наклонный корпус жатки; 15 – упор; 16 – боковой уплотняющий щиток; 17 – поддержка мотовила.

Рис. 2.5. Валковая жатка / её навеска на наклонную камеру комбайна СК-5М/:
1 – регулируемая подвеска; 2 – опора валковой жатки; 3 – контрпривод; 4 – платформа жатки; 5 и 7 – кронштейны; 6 и 9 – направляющие цепи / успокоители/; 8 и 12 – оградительные щитки; 10 – шкив верхнего вала наклонной камеры; 11 – натяжная звёздочка; 13 – транспортный болт; 14 – ведущий шкив вариатора; 15 – ведомый шкив вариатора.
где i – передаточное число клиноременной передачи;
 - диаметр нижнего (малого) шкива, который принимается 120….. 140 мм.
- диаметр нижнего (малого) шкива, который принимается 120….. 140 мм.
Передаточное число клиноременной передачи:
i=  ,
,
где  - частота вращения вала отбора мощности трактора.
- частота вращения вала отбора мощности трактора.
В этом подразделе даётся описание разработанной косилки и её техническая характеристика.
Краткая техническая характеристика
Ширина захвата, м
Рабочая скорость, км/ч
Ориентировочные габаритные размеры, мм
длина
ширина
высота
Тип режущего аппарата
Радиус кривошипа, мм
Длина шатуна, мм
Частота вращения кривошипа, 
Высота среза, см
Потребная мощность, кВт
Количество обслуживающего персонала
ЖАТКИ ВАЛОВЫЕ И КОМБАЙНОВ
Задание на курсовую работу
Тема: 1. «Разработка и расчёт жатки комбайна»
3. «Разработка и расчёт валовой жатки»
Исходные данные
| Показатели
| Номер варианта
|
|
|
|
|
|
|
|
|
|
|
|
| Жатка комбайна
| Валковая жатка
|
| Урожайность, Q, ц/га
|
|
|
|
|
|
|
|
|
|
|
| Длина стеблей, l, м
| 1,1
| 1,05
| 1,0
| 0,95
| 0,9
| 0,85
| 0,8
| 0,75
| 0,7
| 0,65
|
Содержание расчётно-пояснительной записки
1. Агротехнические требования к скашиванию зерновых культур.
2. Краткий обзор и анализ существующих жаток.
3. Разработка и расчёт жатки.
3.1. Выбор и расчёт основных параметров жатки.
3.2. Выбор и расчёт параметров и режимов работы режущего аппарата и механизма привода ножа.
3.3. Расчёт параметров, режима и показателей работы мотовила.
3.4. Выбор и расчёт параметров и режима работы транспортёра (валковая жатка) или шнека (жатка комбайна).
3.5. Разработка конструктивно-кинематической схемы жатки.
4. Настройка и регулировка жаток.
Графический материал
1. Конструктивно-кинематическая схема жатки.
2. Траектория абсолютного движения точки планки мотовила.
Литература
1. Кленин Н.И., Сакун В.И. Сельскохозяйственные и мелиоративные машины.-М.:Колос, 1994.-751 с.
2. Карпенко А.Н., Халанский В.М. Сельскохозяйственные машины.-М.: Агропромиздат, 1989.-527 с.
Тип транспортёра
Число лент транспортёра
Ширина лент, мм
Линейная скорость транспортёра, м/с
Обслуживающий персонал
Передаточное число:
i =  ,
,
А для обеспечения вычисленного значения частоты вращения вала транспортёра  передаточное число конической шестеренной передачи редуктора:
передаточное число конической шестеренной передачи редуктора:
i =  ,
,
где  - частота вращения карданного вала, =
- частота вращения карданного вала, =  .
.
Расчёт цепной передачи привода мотовила не производится, так как серийный клиноременный вариатор обеспечивает большой диапазон изменения частоты вращения мотовила.
В этом подразделе даётся описание разрабатываемой жатки и краткая техническая характеристика.
Техническая характеристика
Тип жатки
Ширина захвата, м
Рабочая скорость, км/ч
Уравновешивание
Высота среза, см
Копирование рельефа поля
Тип режущего аппарата
Ход ножа, мм
Радиус кривошипа, мм
Длина шатуна, мм
Частота вращения кривошипа,
Тип мотовила
Диаметр мотовила, мм
Частота вращения мотовила,
для жатки комбайна:
диаметр спирали шнека, мм
диаметр кожуха (цилиндра), мм
Шаг спирали, мм
Частота вращения шнека,
для валковой жатки:
3. Шаткус Д.Н. Зерноуборочные комбайны «Енисей».-М.: Агропромиздат, 1986.
4. Зерноуборочные комбайны «Дон»/ Ю.А. Песков, И.К. Мещеряков, Ю.Н. Ермашев и др.-М.: Агропромиздат, 1986.
Разработка и расчёт жатки
Разработка схемы жатки
После выбора и расчёта основных параметров и режимов работы рабочих органов можно составить конструктивно-кинематическую (общую) схему разрабатываемой жатки используя примерные схемы (Рис. 2.3. и Рис. 2.4.), общие виды (Рис. 2.5. и Рис. 2.6.) и жатки-прототипы.
Привод рабочих органов фронтальных жаток, навешиваемых на молотилки комбайнов, осуществляется от верхнего вала наклонной камеры, частота вращения которого  =450
=450  . Для обеспечения расчётного значения частоты вращения кривошипного вала
. Для обеспечения расчётного значения частоты вращения кривошипного вала  число зубьев звёздочки контрпривода
число зубьев звёздочки контрпривода
 = i∙
= i∙  ,
,
где i – передаточное число цепной передачи, расположенной на наклонной камере;
 - число зубьев звёздочки ведущего вала.
- число зубьев звёздочки ведущего вала.
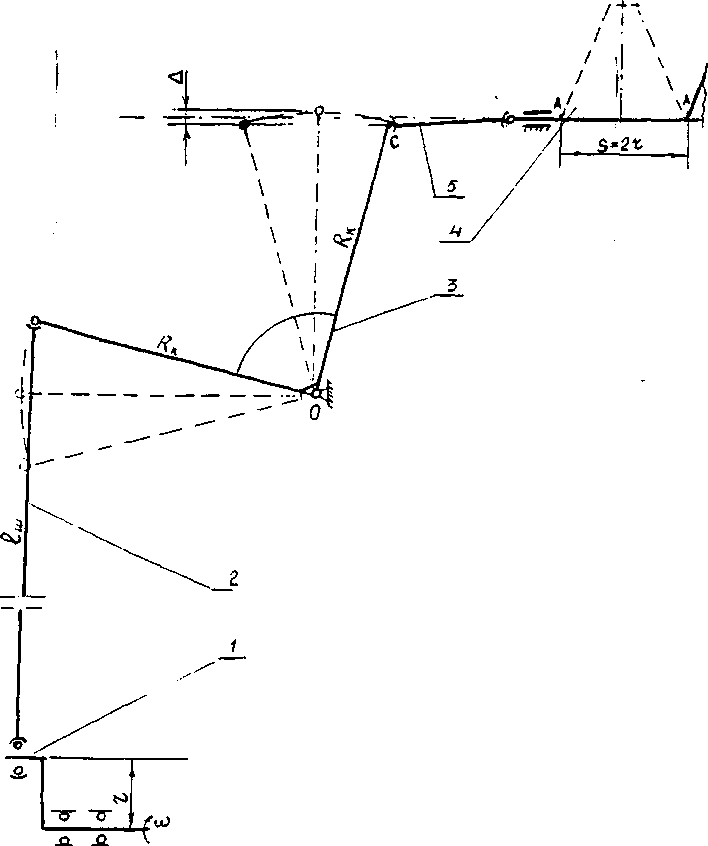
Рис. 2.1. Схема механизма привода ножа: 1 – кривошип; 2 – шатун; 3 – коромысло; 4 – нож; 5 – соединительное звено; Ο – ось вращения коромысла.
Ход ножа S = 2∙r, если длины плеч коромысла равны, угол между ними 90⁰ и коромысло расположено так, как показано на рисунке 2.1. Необходимо предварительно принимать длину плеч  =140 …160 мм. После этого определить отклонение центра шарового шарнира С при крайнем и среднем положении ножа по формуле:
=140 …160 мм. После этого определить отклонение центра шарового шарнира С при крайнем и среднем положении ножа по формуле:
Δ =  ∙(1-
∙(1-  ),
),
Численное значение величин в формулу представлять в миллиметрах. Если отклонение будет находиться в пределах Δ = 4…..6 мм, то окончательно принять длину плеча.
У фронтальных жаток длина шатуна  зависит от ширины платформы, места расположения приводного кривошипного вала и т.д. Поэтому длина шатуна принимается после детальной проработки конструкции жатки. В курсовой работе длину шатуна принять такую же как у прототипа или определить после составления конструктивно-кинематической схемы жатки.
зависит от ширины платформы, места расположения приводного кривошипного вала и т.д. Поэтому длина шатуна принимается после детальной проработки конструкции жатки. В курсовой работе длину шатуна принять такую же как у прототипа или определить после составления конструктивно-кинематической схемы жатки.
Выбранные и перечисленные параметры и режимы работы свести в таблицу.
| Тип аппарата
| Режим работы
| Параметры, мм
|
| L, см
| n.
| S
| r
| 
|
|
|
|
|
|
|
|
|
|
Расчёт параметров, режима
Выбор и расчёт параметров и
Режима работы шнека
Шнек должен обеспечивать пропускную способность молотилки комбайна, подавая хлебную массу равномерно без наматывания её на корпус. Основными параметрами шнека являются диаметр спирали, диаметр кожуха (цилиндра) и шаг спирали (Рис. 2.4.). Они принимаются в зависимости от пропускной способности молотилки:  =450 … 550 мм,
=450 … 550 мм,  = 250 … 350 мм,
= 250 … 350 мм,  =450 … 550 мм. В данной работе их значения принять по прототипу.
=450 … 550 мм. В данной работе их значения принять по прототипу.
При рекомендуемых скоростях движения жаток и хорошем стеблестое оптимальные значения показателя λ = 1,5 … 1,7.
Радиус мотовила должен быть таким, чтобы в низшем положении планка воздействовала на стебель выше центра его тяжести, и вычисляется по формуле:
R =  ,
,
где к – коэффициент, определяющий положение центра тяжести растений.
Коэффициент вычисляют по эмпирической зависимости:
к =  ,
,
где L – длина стеблей, м.
Высота установки мотовила определяется из условия, чтобы планка в момент входа стеблестой не ударяла по колосу
h = L –  +
+  +
+  ,
,
где  - высота установки режущего аппарата (среза), принимается в зависимости от высоты стеблестоя:
- высота установки режущего аппарата (среза), принимается в зависимости от высоты стеблестоя:
 – ширина граблины с планкой.
– ширина граблины с планкой.
Одним из показателей режима работы мотовила является частота вращения
 =
=  ∙
∙  ,
,
Для поддержания заданного значения показателя λ при изменяющейся скорости движения жатки в привод мотовила вводится клиноременный вариатор, позволяющий изменять частоту вращения.
Для графического определения выноса мотовила и расчёта К П Д мотовила с режущим аппаратом построить траекторию движения крайней точки планки граблины (Рис. 2.2.).
Построение ведётся в следующем порядке. В определённом масштабе радиусом R описывается окружность. От центра окружности в направлении движения жатки откладывается отрезок, соответствующий перемещению мотовила за время одного оборота, который определяется по формуле:
 =
=  .
.

Окружность и отрезок  делятся на одинаковое число частей. Из точек деления окружности проводят горизонтальные линии. Из точек деления отрезка радиусом R на одноимённых линиях делаются засечки, которые являются точками абсолютного движения точки планки.
делятся на одинаковое число частей. Из точек деления окружности проводят горизонтальные линии. Из точек деления отрезка радиусом R на одноимённых линиях делаются засечки, которые являются точками абсолютного движения точки планки.
Откладывая из точки О отрезок длиной (h +  ), определяется линия поверхности поля, от которой вертикальным отрезком, равным длине стебля, отмечается точка А на петле циклоиды. Точка А является точкой входа планки в стеблестой, в точке А’ планка покидает этот стебель, который должен быть срезан до этого момента. Поэтому режущий аппарат должен находиться на линии АС. Из точки А’ радиусом R на траектории движения точки
), определяется линия поверхности поля, от которой вертикальным отрезком, равным длине стебля, отмечается точка А на петле циклоиды. Точка А является точкой входа планки в стеблестой, в точке А’ планка покидает этот стебель, который должен быть срезан до этого момента. Поэтому режущий аппарат должен находиться на линии АС. Из точки А’ радиусом R на траектории движения точки  находят точку
находят точку  и положение вала мотовила О”. Таким образом графически определяется вынос мотовила
и положение вала мотовила О”. Таким образом графически определяется вынос мотовила  .
.
Ширина участка стеблей, срезаемых при содействии планки
 =
= 

 ∙ (1 -
∙ (1 -  ),
),
где  - половина ширины петли циклоиды.
- половина ширины петли циклоиды.
Вынос мотовила положителен, когда вал мотовила находится впереди режущего аппарата; отрицателен – сзади и равен нулю – над режущим аппаратом.
Половина ширины петли циклоиды:
 = ∙(arcsin +
= ∙(arcsin +  -
-  ).
).
Коэффициент полезного действия мотовила с режущим аппаратом:
η = ε ∙  ,
,
где Z – число граблин мотовила;
ε – коэффициент, учитывающий густоту хлебостоя, высоту и жёсткость стеблей.
В




