Система координат объекта манипулирования – декартова система координат, которая определяет положение его точки и пространственной ориентации объекта (рис.43). В системе координат объекта манипулирования нулевая точка обычно представляет концевую точку, а ось Z связана с его осью. Если система координат объекта манипулирования не определена, используется система координат фланца.
Координаты объекта манипулирования включают параметры (x,y,z), указывающие положение концевой точки объекта манипулирования, и (w,p,r), описывающие пространственную ориентацию объекта.
Координаты x, y и z могут указывать положение концевой точки объекта манипулирования в системе координат фланца.
Координаты w, p, r указывают пространственную ориентацию объекта манипулирования и угловое его смещение относительно осей X, Y и Z системы координат фланца. Концевая точка объекта манипулирования используется для позиционирования. Пространственная ориентация объекта манипулирования необходима для управление положением в пространстве.
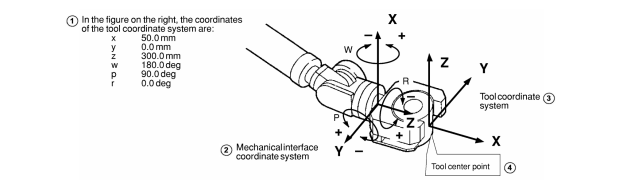
1 Координаты системы координат объекта манипулирования.
2 Система координат фланца.
3 Система координат объекта манипулирования.
4 Точка на объекте манипулирования.
Рис. 43 Системы координат
Систему координат объекта манипулирования можно задать тремя следующими способами.
Метод трех точек (автоматическая установка концевой точки объекта манипулирования)
(дополнительная функция)
При использовании метода трех точек (рис.44) в режиме обучения объект манипулирования подводят к общей точке из трех различных первоначальных положений. В результате автоматически вычисляется положение концевой точки объекта манипулирования. Для повышения точности определения положения концевой точки желательно, чтобы три направления подхода максимально отличались друг от друга. В методе трех точек определяются только координаты концевой точки объекта манипулирования (x, y, z). Значения параметров ориентации инструмента (w, p, r) являются стандартными и определяются как (0, 0, 0).

Рис. 44 Автоматическая установка вершины инструмента методом трех точек
Ориентация объекта манипулирования может быть определена методом шести точек или методом прямого списка после того, как положение установлено.
Метод шести точек
Координаты концевой точки объекта манипулирования можно определить тем же способом, что и в методе трех точек. Затем определяют пространственную ориентацию объекта манипулирования (w, p, r) (рис.45) для чего:
в режиме обучения для определения w, p и r роботу задают перемещение в положительном направлении оси X, параллельной одноименной оси системы координат объекта манипулирования, затем перемещают в точку на плоскости XZ. Используя декартову систему координат или систему координат толчковой подачи, в режиме обучения задается, что наклон объекта манипулирования не должен изменяться роботом.
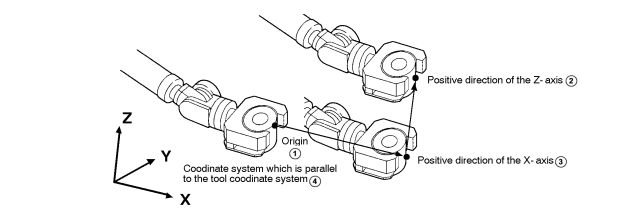
Рис. 45 Метод шести точек
Метод прямого списка
При использовании метода прямого списка (рис. 46) значения могут быть заданы с пульта обучения. Это численные значения координат (x,y,z) концевой точки объекта манипулирования и углов вращения (w,p,r), которые задают ориентацию системы координат объекта манипулирования, по отношению к осям x, y и z системы координат фланца.

1 - система координат фланца,
2 - система координат объекта манипулирования
Рис. 46 Значение (w, p, r), используемое в методе прямого ввода в режиме обучения





