

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Вернемся к рассмотрению метрики
ds (+ – – –)2 = dx 02 – dx 12 – dx 22 – dx 32 с сигнатурой (+ – – –). (14.1)
Для краткости опустим в данном выражении знаки дифференциалов и запишем квадратичную форму (14.1) в виде
s 2 = x 02– x 12 – x 22 – x 32. (14.2)
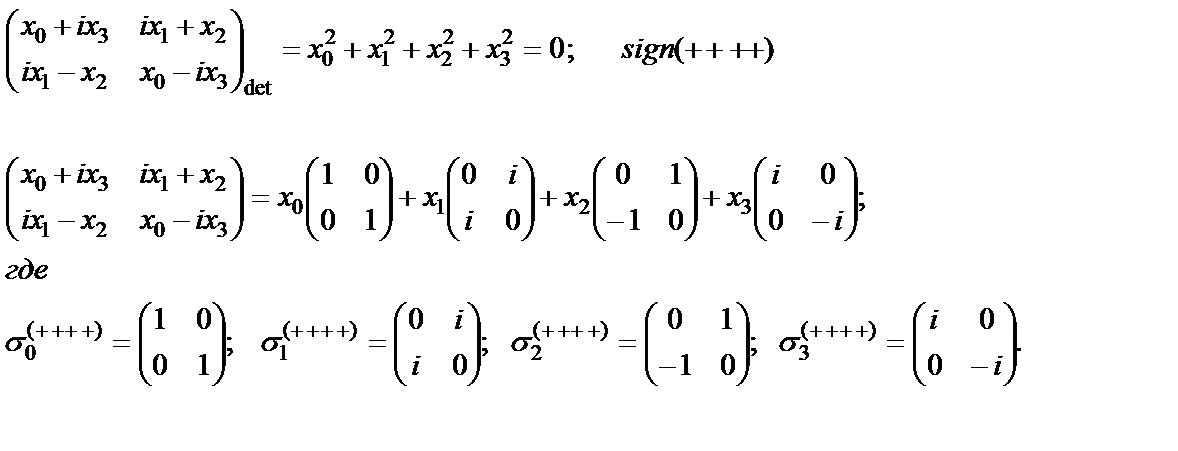
Как известно, квадратичная форма (14.2) является детерминантом эрмитовой 2´2-матрицы
 (14.3)
(14.3)
В том, что данная матрица является эрмитовой, легко убедиться прямым вычислением
 (14.4)
(14.4)
В теории спиноров матрицы вида (14.4) называют смешанными эрмитовыми спинтензорами второго ранга [11, 16].
Представим 2´2-матрицу (эрмитов спинтензор) (14.4) в развернутом виде

где (14.5)

– набор матриц Паули.
В теории спиноров А 4-матрицам вида (14.5) ставятся в однозначное соответствие кватернионы типа
 , (14.6)
, (14.6)
при изоморфизме
 (14.7)
(14.7)
Аналогично, каждая квадратичная форма: (14.8)
| s (+ + + +)2 = x 02 + x 12 + x 22 + x 32 s (– – – +)2 = – x 02 – x 12 – x 22 + x 32 s (+ – – +)2 = x 02 – x 12 – x 22 + x 32 s (+– – –)2 = x 02 – x 12 – x 22 – x 32 s (– – + –)2 = – x 02 – x 12 + x 22 – x 32 s (– + – –)2 = – x 02 + x 12 – x 22 – x 32 s (+ – + –)2 = x 02 – x 12 + x 22 – x 32 s (+ + – –)2 = x 02 + x 12 – x 22 – x 32 | s (– – – –)2 = – x 02 – x 12 – x22 – x32 s (+ + + –)2 = x 02 + x 12 + x 22 – x32 s (– + + –)2 = – x 02 + x 12 + x 22 – x 32 s (– + + +)2 = – x 02 + x 12 + x 22 + x 32 s (+ + – +)2 = x 02 + x 12 – x 22 + x 32 s (+ – + +)2 = x 02 – x 12+ x 22 + x 32 s (– + – +)2 = – x 02 + x 12 – x 22 + x 32 s (– – + +)2 = – x 02 – x 12 + x 22 + x 32 |
может быть представлена в виде спинтензора или А 4-матрицы:
Таблица 14.1
| |

| |

| |

| |
| |

| |

| |
| |

| |

| |

| |

| |

| |

| |

| |

|
Каждой А 4-матрице из табл. 14.1 ставится в соответствие «цветной» кватернион типа (8.17), где в качестве мнимых единиц используются объекты
 (14.9)
(14.9)
– спиновые матрицы Паули - Кэли, которые являются образующими алгебры Клиффорда
|
|
 (14.10)
(14.10)
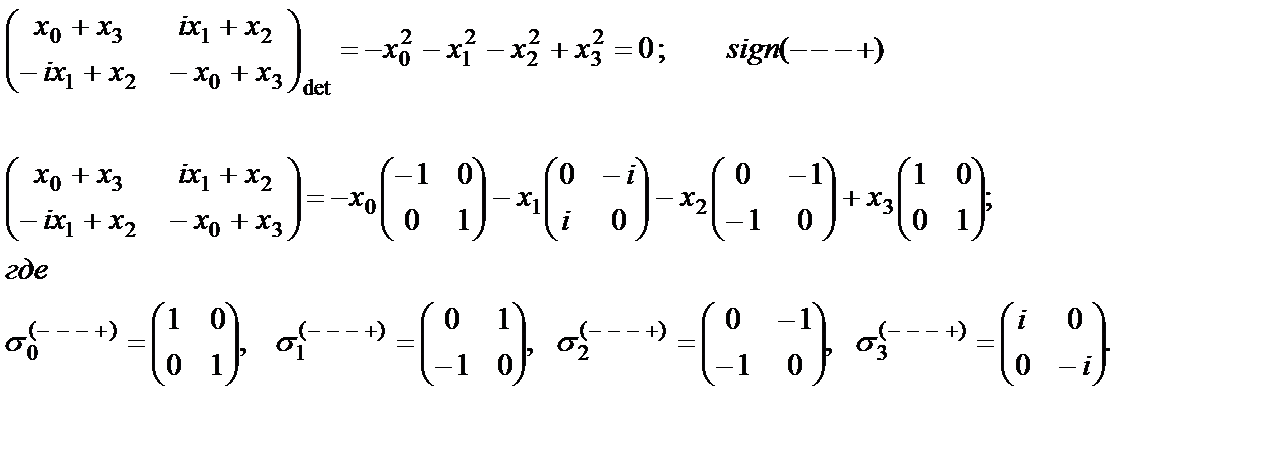
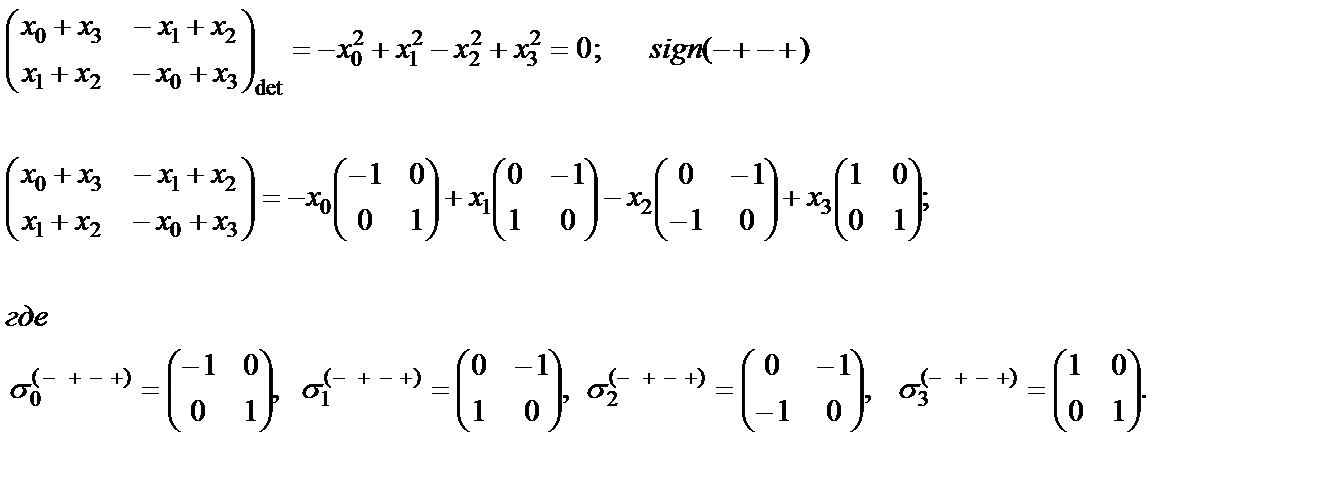
 В табл. 14.1 приведены только частные случаи спинтензорных представлений квадратичных форм. Например, детерминанты всех тридцати пяти 2´2-матриц (эрмитовых спинтензоров):
В табл. 14.1 приведены только частные случаи спинтензорных представлений квадратичных форм. Например, детерминанты всех тридцати пяти 2´2-матриц (эрмитовых спинтензоров):
(14.11)
равны одной и той же квадратичной форме 
Точно так же разветвляются (вырождаются) спинтензорные представления всех 16-и квадратичных форм, приведенных в табл. 14.1. В следующих статьях Алсигны будет показано, что любая дискретная вырожденность (т. е. скрытая многозначность) исходного идеального состояния lm ¸ n - вакуума при отклонении от идеальности приводит к расщеплению (квантованию) на дискретное множество неодинаковых состояний ее поперечных и продольных слоев.
Шестнадцать типов А 4-матриц эквивалентны 16-и «цветным» кватернионам (8.17). Для наглядности все сорта «цветных» А 4-матриц сведены в табл. 14.2.
Таблица 14.2
| Метрика | А 4-матрица | Стигнатура |
| x 02+ x 12+ x 22+ x 32 | 
| {+ + + +} |
| x 02– x 12– x 22 + x 32 | 
| {+ – – +} |
| x 02+ x 12+ x 22 – x 32 | 
| {+ + + –} |
| x 02+ x 12– x 22– x 32 | 
| {+ + – –} |
| – x 02+ x 12+ x 22– x 32 | 
| {– + + –} |
| x 02– x 12– x 22– x 32 | 
| {+ – – –} |
| x 02+ x 12– x 22 + x 32 | 
| {+ + – +} |
| x 02– x 12 + x 22 + x 32 | 
| {+ – + +} |
| – x 02– x 12– x 22+ x 32 | 
| {– – – +} |
| – x 02– x 12+ x 22 – x 32 | 
| {– – + –} |
| – x 02+ x 12+ x 22+ x 32 | 
| {– + + +} |
| x 02– x 12+ x 22– x 32 | 
| {+ – + –} |
| x 02 + x 12– x 22 + x 32 | 
| {– – + +} |
| x 02 – x 12+ x 22 + x 32 | 
| {– + – +} |
| – x 02+ x 12– x 22+ x 32 | 
| {– + – +} |
| – x 02 – x 12– x 22– x 32 | 
| {– – – –} |
Алгебра сигнатур связывает сбалансированную относительно нуля суперпозицию аффинных протяженностей с 16-ю всевозможными стигнатурами:
ds S = (– dx 0 – dx 1 – dx 2 – dx 3) + (dx 0 + dx 1 + dx 2 + dx 3) +
+ (dx 0 + dx 1 + dx 2 – dx 3) + (– dx 0 – dx 1 – dx 2 + dx 3) +
+ (– dx 0 + dx 1 + dx 2 – dx 3) + (dx 0 – dx 1 – dx 2 + dx 3) +
+ (dx 0 + dx 1 – dx 2 + dx 3) + (– dx 0 – dx 1 + dx 2 – dx 3) + (14.12)
+ (– dx 0 – dx 1 + dx 2 + dx 3) + (dx 0 + dx 1 – dx 2 – dx 3) +
+ (dx 0 – dx 1 + dx 2 + dx 3) + (– dx 0 + dx 1 – dx 2 – dx 3) +
+ (– dx 0 + dx 1 – dx 2 + dx 3) + (dx 0 – dx 1 + dx 2 – dx 3) +
+ (dx 0 – dx 1 – dx 2 – dx 3) + (– dx 0 + dx 1 + dx 2 + dx 3) = 0,
с одним из вариантов суперпозиции 16-и А 4-матриц:
 +
+
+  +
+
+  +
+
+  +
+
+  +
+
+  +
+
+  +
+
+  +
+
+  +
+
+  +
+
+  +
+
+  +
+
+  +
+
+  +
+
+  +
+
+ 
(14.13)
Выражение (14.11) равно нулевой 2´2-матрице, т.е. отвечающей требованию соблюдения «вакуумного баланса».
|
|
Приведенный здесь спинтензорный математический аппарат удобен для решения ряда задач, связанных с многослойными внутри-вакуумными вращательными процессами.

| י ה ה ו |
≡ ≡ 
Зог‘ар говорит: – «За гранью всего того, что может быть сказано, и того, о чем невозможно и не следует говорить, над всем тем, что Создано Б-ГОМ, и тем, что само принадлежит Б-ЖЕСТВЕННОМУ, находится Абсолютное ЕДИНСТВО, не имеющее ни частей, ни концов, ни уровней, ни пределов. Сокрытость Сокрытого, Тайна Беспредельности, Узел в Свернутом, замкнувшийся в Кольцо...».
Рассмотрим два примера с использованием спинтензоров.
Пример № 14.1 Пусть заданы матица-столбец и эрмитовосопряженная ей матрица - строка
 , (14.14)
, (14.14)
которые описывают состояние спинора.
Проекции спина на оси координат для случая, когда метрическое пространство имеет сигнатуру (+ – – –) могут быть определены с помощью спинтензора (14.4)

(14.15)
Пример № 14.2 Пусть прямая волна описывается выражением
 , (14.16)
, (14.16)
а обратная ей волна
 , (14.17)
, (14.17)
где a+ и a– – амплитуды прямой и обратной волны. В общем случае это комплексные числа:

содержащие информацию о фазах волн φ+ и φ–.
Взаимно противоположные волны (14.16) и (14.17) можно представить в виде двухкомпонентного спинора:
 , (14.18)
, (14.18)
и эрмитовосопряженного ему спинора
 . (14.19)
. (14.19)
Условие нормировки в данном случае выражается равенством
 (14.20)
(14.20)
Для нахождения проекций спина (круговой поляризации) луча света на оси координат воспользуемся спинтензором
 (14.21)
(14.21)
который связан с 3-мерным элементом длины
 (14.22)
(14.22)
Полагая в выражении (14.21) x 1 = x 2 = x 3 = 1, рассмотрим проекции спина на оси координат
 (14.23)
(14.23)
Подставляя в это выражение спиноры (14.16) и (14.17), получим три следующие проекции спина на соответствующие координатные оси x 1 = x, x 2 = y, x 3 = z:
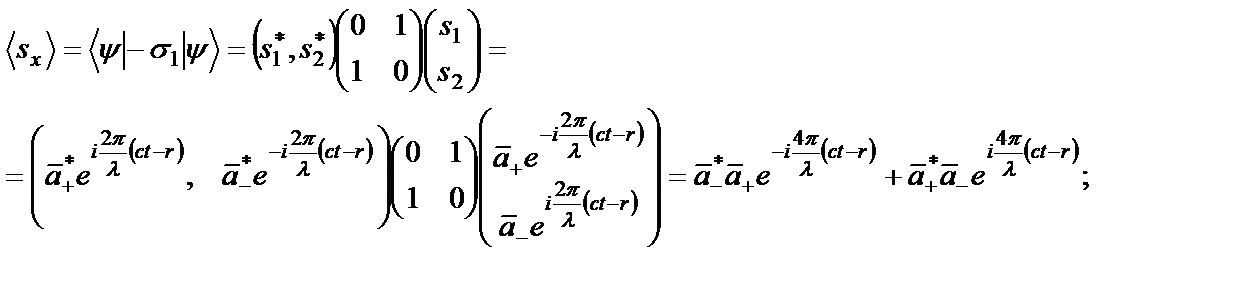 (14.24)
(14.24)
 (14.25)
(14.25)
 (14.26)
(14.26)
В случае φ+= φ–= 0 формулы (14.24) – (14.26) приобретают следующий упрощенный вид:
 ,
,
 , (14.27)
, (14.27)
 .
.
В случае равенства амплитуд прямой и обратной волн a+ = a – вместо уравнений (14.27) получим следующие усредненные проекции спина
 ,
,
 , (14.29)
, (14.29)
 .
.
Проекция спина (вращающегося вектора напряженности электрического поля) на направление распространения луча света Z неизменна и равна нулю. При этом его проекция на плоскость XY, перпендикулярную направлению распространения данного луча, вращается вокруг оси Z с угловой скоростью w = 4 p с / l. Таким образом, спинорное представление распространения сопряженной пары волн приводит к описанию круговой поляризации без привлечения дополнительных гипотез.
|
|
|
|
|

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!