Поясним принцип промежуточного программного клеммника. Введение в программу промежуточных алгоблоков при вводе информации, или по-другому назовём их промежуточными «клеммниками». В дальнейшем кавычки опустим.
Данный приём программирования позволяет оперативно переходить на резервный канал, не корректируя связи в самой программе [39; 40; 44; 49; 53].
При отладке программы через этот клеммник можно подавать тестовые сигналы для проверки правильности работы программы.
Приведём структуру программы в общем виде (рисунок 24). Допустим, в нашем случае резервным каналом является канал номер восемь (Х8). В качестве промежуточного клеммника для каждого дискретного сигнала используют алгоритм ИЛИ, а для аналоговых сигналов алгоритм масштабирования с коэффициентом масштаба, равным единице.

Рисунок 24 Фрагмент программы без клеммника
На рисунке 25 представлена та же программа, только с промежуточным программным клеммником.

Рисунок 25 Фрагмент программы с клеммником
В случае отказа первого канала переходим на резервный канал: аппаратно и программно. На рисунке 26 показаны изменения в программе при наличии клеммника при переходе на восьмой резервный канал. На рис.27 и рис.28 представлена не программа, а её структура.

Рисунок 26 Иллюстрация перехода на резервный канал
При наличии промежуточного клеммника делается, как видим одно изменение (одна конфигурация), не меняя ничего в самой программе! В программе переходим на резервный канал оперативно. Электрическое изменение, переключение на резервный канал, делается тоже просто.
Допустим первый канал отказал. А канал восьмой канал – резервный. В этом случае можно оперативно перейти на резервный канал. Провода первого канала, обычно для дискретного канала один провод, перебрасываю (подключают) на резервный, в данном случае на 8-й канал. В программе тоже делают простое изменение, которое видно на рисунке 26: сигнал с восьмого канала подают на первый вход промежуточного программного клеммника. Внутри программы ничего не изменяют. На рисунке 27 приведена иллюстрация программного перехода на резервный канал.

Рисунок 27 Иллюстрация программного перехода на резервный канал
Пороговый алгоритм НОР
В библиотеке алгоритмов Р-130 имеется прекрасный алгоритм нуль-орган (НОР), который позволяет сравнивать аналоговый сигнал с верхней или нижней границей (рис.28). Алгоритм НОР может, например, использоваться в блоке сигнализации. В качестве Хб принимают (задают) верхнюю технологическую границу (ВГ). Хм соответствует нижней технологической границе (НГ). DХ – величина гистерезиса задаётся исходя из погрешности измерительного канала. На рисунках 29 и 30 показана суть работы сигнализации без гистерезиса и с его наличием.
На рисунке 29 показано формирование звуковой и световой сигнализации, когда величина гистерезиса равна нулю. Любой реальный сигнал «дышит», т.е. его значения меняются в пределах погрешности измерительного канала. Поэтому на границе сигнализация будет то срабатывать, то пропадать. Таких параметров на объекте может быть десятки. Оператор технологического процесса будет в постоянном напряжении, не имея новой информации по данному параметру. На рисунке 29 поясняется влияние гистерезиса на работу нуль-органа. Предположим, что гистерезис отсутствует. Так как реальный сигнал всегда "дышит" в пределах погрешности измерений (датчика и АЦП), то при подходе к допустимой границе сигнал может несколько раз переходить её и возвращаться обратно (рисунок 29). Это приведет к периодическому кратковременному срабатыванию сигнализации. Чтобы этого не происходило, задается величина гистерезиса, которая должна быть вычислена на основе данных о погрешностях измерительного канала.
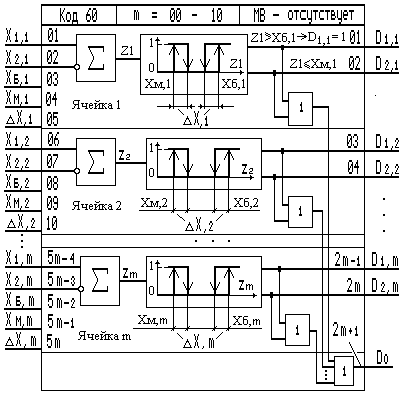
Рисунок 28 Структура алгоритма НОР

Рисунок 29.– Графики формирования звука и света (без гистерезиса)
На рисунке 30 показано формирование звуковой и световой сигнализации при наличии гистерезиса в алгоритме нуль-органа. Величина гистерезиса выбрана исходя из погрешности измерительного канала (формула 5) [47].
Для исключения постоянных срабатываний сигнализации, когда значение параметра достигло границы, по каждому параметру задают величину гистерезиса. Ниже рассматривается та же ситуация, только гистерезис имеется и правильно выбран.
Верхняя (ВГ) и нижняя (НГ) границы изображены сплошной линией. Приведём пример. Пусть НГ=20, а ВГ=80. Величина гистерезиса равна трём (Dх=3). Допустим, что параметр Х немного «дышит» и приближается к ВГ. Через каждую секунду значения могут быть такими: 79.5, 79.8, 79.4, 80.1. При первом превышении ВГ, т.е. при значении 80.1 сработает звуковая и световая сигнализация: свет мигает, сирена орёт. Оператор сбрасывает сирену (звук). Свет становится ровным, т.е. после сброса (квитирования) перестаёт мигать. Значения параметра продолжают изменяться: 79.9, 80.2, 79.8 и.д. Свет не сбрасывается даже если значение параметра, как мы видим, меньше 80. Оператор устраняет нарушение режима, и параметр возвращается в рабочий диапазон: 79.5, 79.1, …, 78.3, (свет ещё горит!) и, только, когда значение параметра примет, хоть раз значение 76.9, световая сигнализация сбросится. Т.е. значение параметра не случайно, не в пределах погрешности измерительного канала, а реально уменьшится и отойдёт от границы – сигнализация сбрасывается!

Рисунок 30 Сигнализация при наличии гистерезиса
Оценка величины гистерезиса (это так, для сведения). Просматриваются метрологические характеристики каждого элемента измерительного канала. Допустим, мы контролируем температуру. Измерительный канал включает термопару, нормирующий преобразователь, аналого-цифровой преобразователь (АЦП), программное получение вещественного числа. Погрешности каждого элемента цепи случайны и независимы. Из паспорта на термопару берём предельную относительную погрешность термопары, которая пусть будет 0.5%. То есть s1=0.5%. Погрешность нормирующего преобразователя равна 0.5%. То есть s2=0.5%. Погрешность АЦП равна 0.3%, т.е. s3=0.5%. Методическая ошибка специального программного обеспечения равна 0.2% (s4=0.5%). Тогда суммарная погрешность измерительного канала для независимых случайных величин равна

| (5)
|
Для исключения постоянных срабатываний сигнализации, когда значение параметра достигло границы, по каждому параметру задают величину гистерезиса. Ниже рассматривается та же ситуация, только гистерезис имеется и правильно выбран.
Если объект работает, то можно среднеквадратическое отклонение оценить по статистике измерительного канала. Необходимо оценить математическое ожидание, т.е. правильно вычислить среднее значение параметра. Оценить дисперсию. Взять корень квадратный из оценки дисперсии и получить среднеквадратическое отклонение (s). После чего это значение умножают на два или на три и получают величину гистерезиса по данному измерительному каналу.
Разберём ещё одну нехорошую ситуацию (Рисунок 31)

Рисунок 31
На рисунке 32 представлена структура программы защиты от выброса или провала аналогового сигнала.

Рисунок 32 Структура алгоритма защиты от выброса или провала аналогового сигнала
Группа блоков, обведённых пунктирной линией, обеспечивает защиту от выброса. Но данная программа не обеспечивает защиту от обрыва в измерительной линии. Для выявления обрыва требуется в режиме реального времени контролировать скорость изменения параметра и значение параметра. Если скорость превысит допустимую и следом значение параметра станет близким к нулю или меньше нуля (если имеем после нормирующего преобразователя ток от 4 до 20mA), то эта ситуация распознаётся как обрыв в линии.
Мажоритарный выбор
Для повышения надёжности иногда один и тот же параметр контролируют несколькими датчиками, т.е. измерительные каналы резервируют. Автоматический выбор исправного канала или каналов осуществляют, например, применяя алгоритм мажоритарного выбора, т.е. выбирают по большинству. Проблеме выбора исправного канала из нескольких требуется посвятить отдельную работу. В большинстве работ, ссылка на которые имеется в пособии [48], рассматриваются абстрактные, теоретические ситуации, мало применимые к реальным системам автоматизации. Алгоритм мажоритарного выбора приведён в учебном пособии [48]. На рисунке 33, в программе, используется алгоритм мажоритарного выбора аналоговых значений два из трёх (представлен в виде блока МЭ).

Рисунок 33 Структура программы с мажоритарным выбором по трём аналоговым каналам
Группа элементов с номером 7 представляет программный промежуточный клеммник по аналоговым каналам, а с номером 8 — программный промежуточный клеммник по дискретным каналам. 15- мажоритарный элемент (МЭ), на который поступают три аналоговых сигнала после блоков защиты (AZ). Y – основной выход МЭ. А – признак отказа одного из каналов. N – номер отказавшего канала. Остальные сокращения расшифрованы выше. Обозначения D1, D2, X1, X2, X3 до блока защиты и  после блока защиты. НОР – нуль-орган. ВГ- верхняя граница. НГ – нижняя граница. ∆Х- величина гистерезиса. Два дискретных выхода нуль-органа D1 и D2. Структура алгоритма НОР приведена на рис. 44.
после блока защиты. НОР – нуль-орган. ВГ- верхняя граница. НГ – нижняя граница. ∆Х- величина гистерезиса. Два дискретных выхода нуль-органа D1 и D2. Структура алгоритма НОР приведена на рис. 44.
На рисунке 33 сигналы с первых трёх каналов поступают на алгоритм мажоритарного выбора два из трёх (МЭ). Первые три датчика контролируют один и тот же параметр. При отказе одного из трёх каналов происходит автоматическое переключение на исправные два. Алгоритм и программа простого блока мажоритарного выбора два из трёх приведены в учебном пособии [49; с.29-59]. Там же указаны недостатки классического алгоритма мажоритарного выбора два из трёх.
В структурной схеме (рис. 33) отсутствует селективная фиксация нарушений, отсутствуют режимы работы: автоматический и ручной, которые полезны при тестировании программы, отсутствует связь с ПЭВМ. Несмотря на эти недостатки, структура алгоритма стала более совершенной и реальной.
Представленное разнообразие структур блоков сигнализации говорит о том, что в каждом конкретном случае следует подходить творчески, анализируя и выбирая наиболее оптимальную структуру с точки зрения требований к ведению технологического процесса, возможностей аппаратно-программных средств и возможностей исполнителя.
Классический алгоритм мажоритарного выбора имеет существенный недостаток при практической реализации. Если отказывает большинство каналов, то на выходе будем иметь значения отказавших каналов. Теоретики могут возразить, что такого быть не может, два или три канала сразу не могут отказать. Да теоретически вероятность очень мала, а практически весьма вероятно. Например, пропало питание на двух или трёх преобразователях, в результате чего достоверная информация перестала поступать. Т.е. хоть физически каналы и исправны (теория права), а фактически достоверная информация перестала поступать в систему.
Одним из направлений повышения достоверности получаемой с резервных датчиков информации является оценка средних значений параметров по каждому каналу в режиме реального времени, а не только контроль текущих значений параметров. При обрыве текущее значение параметра скачком приближаются к нулю (если на вход клеммно-блочного соединителя АЦП поступают токовые сигналы от нуля до пяти mA или от нуля до 20mA). Если имеем дело с токовым сигналом от 4 до 20 mA, то при обрыве сигнал становится меньше нуля.
Классический алгоритм мажоритарного выбора не учитывает среднее значение параметра, поэтому при отказе канала или сбое алгоритм рушится. Ему не за что цепляться. Среднее значение при отказе канала не изменяется и может служить дополнительной точкой для анализа. Если текущее значение параметра осталось близко к своему среднему значению, то считается, что канал в норме. Естественно ложные значения не усредняются.
На правильную оценку среднего значения параметра в АСУ ТП обращено внимание в учебном пособии [47]. На рисунке 34 представлена структура системы по проверке и наладке модифицированного алгоритма. Такая структура максимально приближает к реальным условиям: имитируются обрывы, выбросы, провалы, систематические и случайные погрешности по каналам. Систематическую погрешность можно задавать как постоянной для всего диапазона, так и изменяющейся по определённому закону.
Имитировать изменение параметра синхронно вручную по трём каналам затруднительно, поэтому один сигнал распараллеливается на три канала. Такой приём можно использовать и при работе с программой, реализующей алгоритм выбора три из пяти. На рисунке 34 этот сигнал выделен жирной линией. В этом случае вращается один потенциометр, сигнал с которого распараллеливается на три канала. Такой приём можно реализовать программно, используя, например, генератор сигналов треугольной формы, сигнал с которого поступает на несколько каналов. Генератор можно остановить и далее, от этого значения, изменять сигнал вручную. Программно проще накладывать на сигнал случайную погрешность с различными законами распределения [110; 111].

Рисунок 34 – Структурная схема имитации трёх значений параметра
После отладки алгоритма и программы можно ввести модель ОУ и контроль параметра брать с выхода модели. Пояснение обозначений (к рисунку 34). Инерционность канала достаточно представить в виде апериодического звена первого порядка с запаздыванием:  . В каждом канале устанавливают экспоненциальный фильтр:
. В каждом канале устанавливают экспоненциальный фильтр:  .
.
∆Х1, ∆Х2, ∆Х3 – смещение сигнала по каналам.
ПЕР – переключатель, необходим для имитирования обрыва по каналам.
С1, С2, С3 – команды, формирующие обрыв.
Х– входной сигнал – имитация изменения контролируемого параметра.
Хнг, Хвг – нижняя и верхняя граница смещения сигнала по каналу.
У – основной выход алгоритма мажоритарного выбора.
NA – номер отказавшего канала.
D1, D2, D3 – признаки отказа соответствующего канала.
А – общий признак отказа какого-либо канала.
В пособии [43] рассматривается алгоритм мажоритарного выбора три из пяти аналоговых сигналов. Здесь, так же реализуется принцип максимального согласия. Если значения сигналов по трём каналам близки, то за основной выход берётся среднее двух сигналов из этих трёх. Сигнал значение, которого отличается от других значений, считают отказавшим. Допускается расхождение между показаниями датчиков в пределах погрешности каналов.
Но на все случаи, которые могут быть в жизни, невозможно разработать структуры и всё предусмотреть, поэтому здесь даются основные структуры, комбинируя и добавляя которые можно создать весьма эффективную и гибкую систему сигнализации.






